

在DNN中FPGA做了一些什么?
描述
引言
深度神经网络(deep nearal network)是机器学习发展20年来取得的最大突破,比如在语音识别方面,相比于传统方法,其将错误率降低了30%;而在2011年的图片识别竞赛上,将错误率从26%降低到3.5%,这些使得处于发展低谷的人工智能突然热门起来,从学术界扩展到工业界,甚至在google的alpha go击败了顶级围棋大师李世石后,人工智能成为全民讨论的热门,所有的程序员都梦想转行机器学习。
DNN中应用最广泛的是CNN和RNN,CNN是一种卷积网络,在图片识别分类中用的较多,RNN可以处理时间序列的信息,比如视频识别和语音识别。这些DNN结构通常很深,计算量也很大。比如VGG16用来处理1000种图片类别,有550MB的权重数据,完成一个分类就需要31Gop(operations)。为了降低计算量和访问内存时间,有两种方法:量化和降低权重。量化是减小权重或者激活数据的精度,比如从32bit浮点量化到8bit甚至1bit,就减小了数据量。降低权重包括剪枝和结构简化,这两种方法可以去除多余的权重参数。
DNN包括训练和推理两个阶段,训练是一个学习过程,通过不断的对权重进行迭代更新而使得网络获得智能。而推理阶段是给出一定输入后,网络会根据之前学习到的知识,输出准确结果。为了使得结果具有更高准确率,训练是进行浮点运算,同时涉及到大量的微分运算,所以训练通常由GPU完成。但是训练是一次性的,当训练完成,网络就可以直接用于推断而不需要再进行训练。FPGA就是用于推理过程,相比于CPU,具有更加灵活可编程的特点。可以针对DNN的特性增加运算并行度,调整内存访问,比CPU获得更高的实现效果。本章对自己基于FPGA进行DNN设计的经验做一个总结,包括对网络模型的一些体会,以及FPGA设计架构的一些思路,抛砖引玉,期待更多热爱AI加速的同学们加入讨论。
1
DNN模型
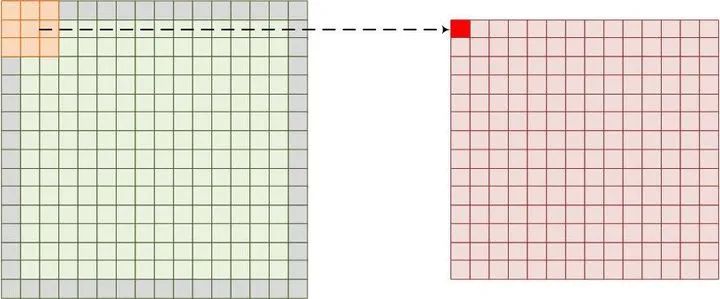
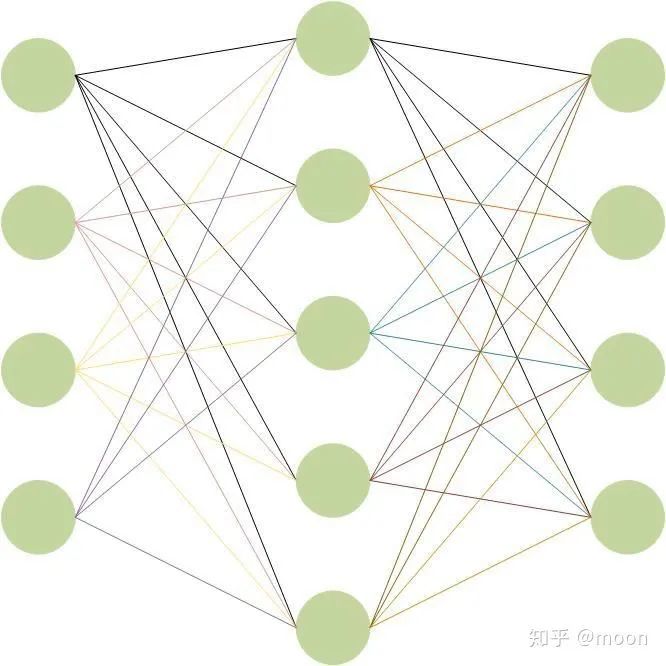
不论是CNN还是RNN,一个共同特点是整个网络是由几个相同的单元联结形成的。CNN中基本的单元是神经元,一个神经元包含一个权重和激活函数,其中权重是对输入信息进行卷积(图1.1),几乎大部分运算量都集中在卷积运算中。激活函数是对卷积后的结果进行非线性运算,激活函数有很多,像Relu,sigmoid等。基本的CNN网络结构如图1.2,网络每层都由多个神经元构成,每个神经元的输入来自上一层的输出,本层输出作为下一层的输入。每层的输入通道是上一层神经元的个数,输出通道是这一层神经元个数。每个神经元对应不同输入通道的数据都有不同的权重数据(即kernel),这些权重和对应输入通道的图像完成卷积之后再求和,最后通过非线性激活函数给出输出通道的值。我们用伪代码来表示一层网络的运算过程:
For(int o=0;o
其中内四层循环是图像和权重的卷积运算,FPGA就是利用这6层循环进行加速。从这伪代码中可以看出每个乘法都是相互独立的,不会依赖于其他运算,而加法包含两种,一种是在卷积运算中,另外一种是每个输入通道卷积后的数据要求和。
图1.1 图像卷积
图1.2 CNN网络结构
另外一种比较常用的网络是RNN,这是一种循环神经网络,具有记忆功能,可以处理时序信息。这里重点介绍一下LSTM网络,LSTM也是一种RNN。但是其增加了多个门控:记忆门,输入门,输出门等。这些门解决了梯度消失和发散的问题,能够处理更长时序的信息。所以在语音识别和视频识别方面有重要应用。LSTM原理的介绍可以参见本公众号历史文章《LSTM原理》。FPGA更多的关心其中有哪些运算,LSTM中主要包含矩阵乘法,向量求和,激活操作,向量点乘等。矩阵乘法消耗最多的运算资源,如何优化这种运算是FPGA实现加速的关键。
对于矩阵乘法,根据其乘法顺序有一下几种方式。
1) 小矩阵x小矩阵
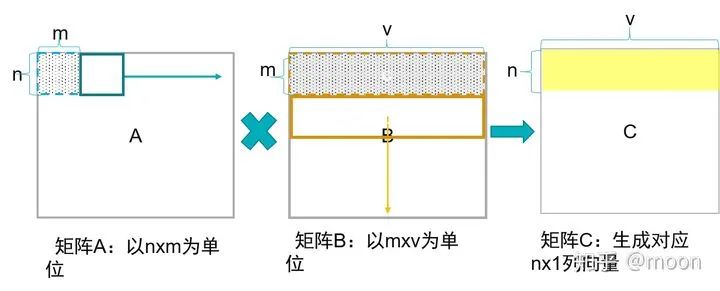
A每次获得nxm块数据,和B的mxv块数据相乘,然后A移动nxm块,B向下移动mxv块,再次相乘并且和之前结果累加,当A移动到右端,B同时移动到底端,完成C中nxv矩阵块。A中数据复用率在V次。
图1.3 小矩阵x小矩阵
2) 列向量x行向量
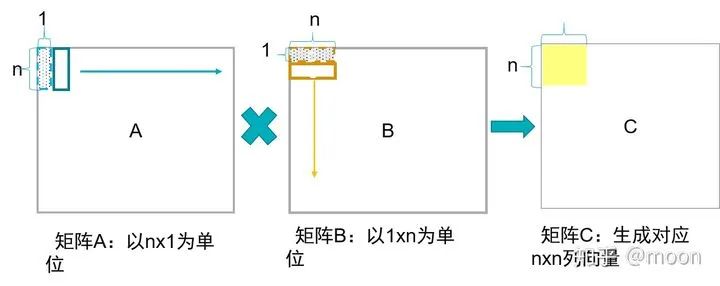
A每次获得nx1列向量,B获得1xn行向量,二者进行叉乘,得到nxn个矩阵数据,然后A向右移动,同时B向下移动,二者叉乘结果和上一次进行累加,最后当A移动到右端,B到底端,得到了一个nxn大小的C矩阵块。A中数据复用率在n次。
图1.4列向量x行向量
对比这两种计算方式,第一种A数据复用率取决于B矩阵列大小。A可以看做权重,B看做输入的图像或者声音信息,如果输入信息“宽度不够”,那么权重利用率低,就会造成运算比搬运数据慢,造成带宽瓶颈。第二种方式A仅仅需要n个数,就能参与n*n次乘法,利用率较高。这能够很大缓解带宽瓶颈。但是如果B的宽度较小或者B为向量,那么就会造成算力较低,搬运进n个数只能计算n次乘法。如何选择需要根据实际情况来决定。
2
量化和减少权重
虽然浮点数能够表示更高的数据精度和更大的数据宽度,但是浮点数据占用的存储资源和运算资源都较大,造成推理时间较长。随着网络的复杂和加深,对推理延时的要求越来越高,因此通过必要手段来压缩网络模型,降低推理延时显得非常重要。压缩网络模型主要有两种方式:量化和减少权重。
1) 定点化。
通过仿射变换将浮点数等效的映射到定点数空间,比如对于一个分布范围在(Xmin, Xmax)的权重数据,需要映射到(0,N-1)区间,其中N是定点可以表示的数据范围。浮点数就可以通过一个尺度和偏移量来表示为:
其中Z为0点偏移量,也是定点数据,S为尺度大小,用浮点数表示。在计算卷积的时候,就可以将尺度因子提取出来进行后处理,而乘法和加法运算使用定点完成。比如对于一个卷积运算可以表示为:
2) 二值化
二值化就是将参数量化到两个值{-1, 1},和一个尺度参数。二值化网络大大降低了运算和参数存储,但是也对网络精度有很大削弱,所以应用范围很窄,比如用在MNIST和CIFAR-10这样比较小的数据集中。对于定点乘法一般都是用DSP实现,所以算力大小受到了FPGA中DSP数量的限制。而二值化网络的乘法运算可以通过简单的逻辑来实现,不在受限于DSP资源,可以大大提高算力。将浮点转化为二值有两种方式,一种是设定阈值,超过阈值设为1,小于设为-1。即:
其中概率为:
随机rounding不会导致参数分布发生偏移。
1) log量化
在一个2为底的对数表达中,参数被量化为一个2的幂次数据和尺度数。对数表达可以通过少量的bit位数涵盖宽阔的数据范围。比如3bit数据,最大为8,用2的幂次表达可以涵盖从0到255个数据范围。使用了log表达的乘法就可以用移位操作来实现了,这大大节省了DSP的使用。
量化的方式主要分为两种:一种是训练后量化,一种是在训练过程中量化。训练后量化省去了重新量化,但是可能对精度造成较大损失。训练过程量化,是在进行前向网络计算的时候,使用量化参数,而在反向传播过程中存储了浮点参数,更新浮点参数。过程如下:
减少权重的方法也有很多,比如剪枝和结构化参数。剪枝是去除不重要的神经元连接,大大减少了权重数据,而结构化参数是通过设定阈值,让某一块的参数集体为0,这样降低了参数存储和计算量。这两种方法的详细介绍请见公众号之前的文章。
3
FPGA中并行方法
CNN中可以进行并行化运算的结构有:输入通道,输出通道,图像卷积。这其中输出通道之间是没有依赖关系的,而输入通道的结果是需要求和的。图像卷积每行输出像素之间没有依赖关系,但是每个结果像素是对应原来图像多个像素的。即一个卷积核涵盖大小的像素和对应卷积核相乘后累加。
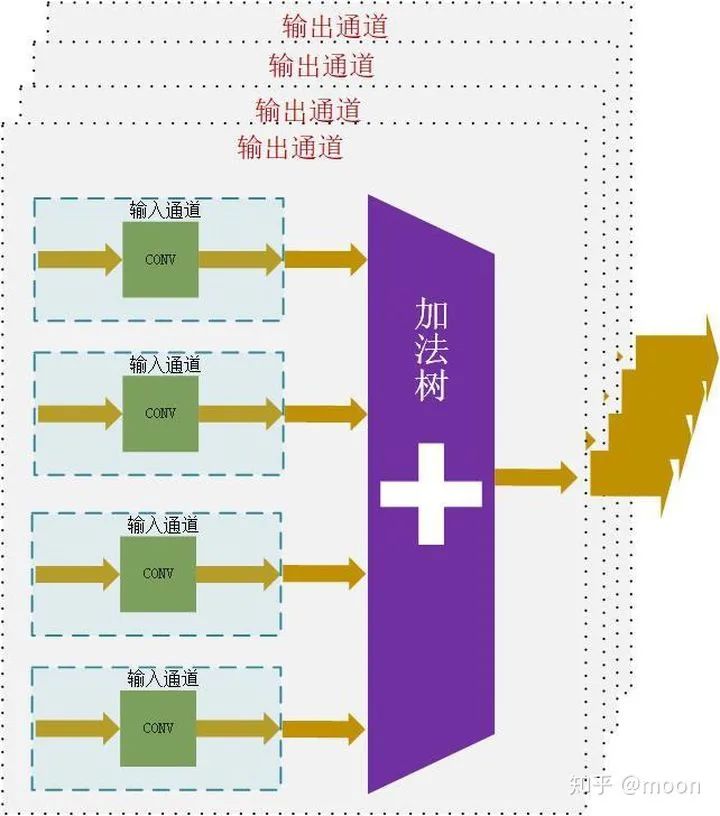
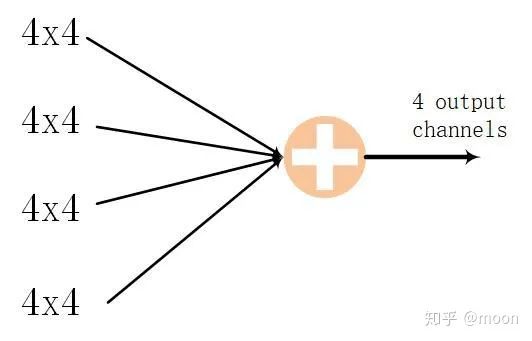
神经网络中输入输出通道数量通常都较大,从输入输出通道上并行是一个很好的加速方法。比如我们选择4个输入通道和4个输出通道,如图3.1所示。
图3.1 输入输出通道并行化
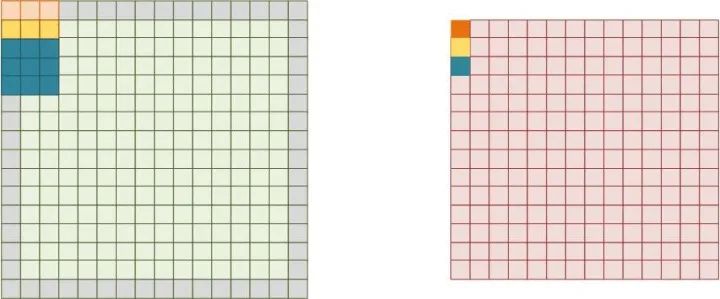
这样就可以同时并行4x4个卷积运算,对于一个网络层为16(输入通道)x16(输出通道)的卷积运算,应用上述结构,就可以这样拆分来运算(图3.2):每次都完成4x4通道运算,因为有16个输入通道,进行4次这样的运算,就可以输出4个输出通道数据。以同样方法进行4次就实现了16x16网络层的卷积运算。
因为输入通道之间需要求和运算,所以使用了加法树。随着输入通道变大,加法树级数会变深。假设使用2输入加法模块,那么上述4通道结构的加法树级数就是2。在进行FPGA设计的时候这是一个需要考虑的问题,输入通道越多,加法树的fan-in越大,那么在高速时钟情况下,不同路径时间的延时就会影响时序性能了。如果输出通道变大,那么feature map数据的扇出就会变大,因为同一个feature map是被所有输出通道共享的。
图3.2 通过4次4x4运算,然后求和完成4输出通道数据
输入输出通道的并行数收到了网络层大小以及fan-in和fan-out的限制,不可能太大。所以要增加并行度还需要继续探索图像卷积。首先我们想到卷积不是多个像素和卷积核进行乘法嘛,那么我们也将这些乘法并行起来就可以啦。但是这样存在一个问题就是:卷积核大小是不固定的,比如3x3卷积核中9个乘法被同时执行,那么等到了1x1卷积核,就会只有1个乘法器被使用,降低了乘法器利用率。因此这样并行不灵活。并行运算最好找到不存在依赖关系的运算。每行像素的输出是并行的,没有依赖关系的。那么就可以同时进行多行的卷积运算,而一个卷积核内的乘法和加法就可以用一个乘法器和累加器来做,这样就能适应不同卷积核大小的运算。多行并行运算如图3.3。
图3.3 3行卷积并行运算
采用以上输入输出通道的架构,缺点就是fan-out和fan-in较大,加法树级数较大。有没有什么方法可以降低fan-in和fan-out呢?如果将输入通道的求和也使用累加来实现,那就变成只有一个PE完成卷积运算以及不同通道的求和。但是一个PE却降低了并行度,那么可以想到增加串行的PE数量来增加输入并行度,即演变为一列PE来实现输入通道求和。由于PE排序上的空间限制,导致后边一个PE的计算相比于前一个PE要有1个周期延时,如果将数据从从PE间的移动打一拍,那正好可以在第二个PE计算出来的同时完成和前一个PE的求和,这就是脉动的关键所在。更具体的脉动阵列讲解请看公众号之前文章。
图3.4 加法树转化为脉动结构
4
存储结构
即使经过了量化和剪枝等处理,网络的参数也非常大(如表4.1),这在有限的FPGA资源下是无法全部存储于片上的。因此需要一个片外存储器(DDR)来存储权重和信息数据,在需要数据的时候从片外搬上片上来进行计算,并将结果存储到片外存储器。
表4.1 几种网络压缩前和压缩后大小对比
表4.2 几种Xilinx器件存储资源
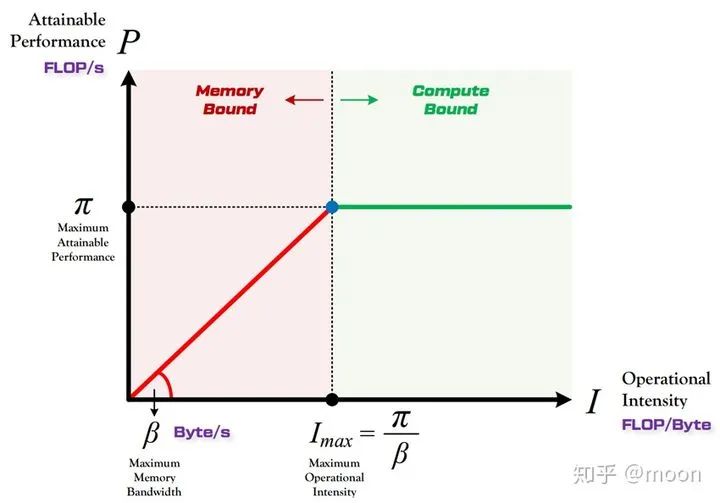
这时候影响网络推理延时的因素就不仅仅包含算力的大小了,还需要考虑片上存储大小,ddr带宽,权重和信息数据复用率的影响。带宽和算力对推理延时的综合作用可以通过roofline图来表示。所谓“Roof-line”,指的就是由计算平台的算力和带宽上限这两个参数所决定的“屋顶”形态。Roofline的纵坐标表示算力,屋顶代表了FPGA所能达到的最大算力,横坐标表示每byte数据可以参与多少次运算,表示了权重和信息数据的复用率。由roofline划分出两个瓶颈区域,一个是算力瓶颈,一个是带宽瓶颈。当权重和数据复用率较高,即I大于FPGA所能达到的最大算力对应的复用率的时候,FPGA算力就是瓶颈,但是这种情况是好事情,因为FPGA的运算资源达到了100%的利用。如果数据复用率较低的时候,那么带宽就成为瓶颈,因为在当前带宽下,载入到片上的数据无法支持最大算力,这时候FPGA运算资源利用率没有被全部利用,存在等待数据情形。
图4.1 roofline图
在一个CNN中,网络越往后图像大小越小,输入输出通道数量变大,这导致的结果就是权重参数的复用率变低,这个时候FPGA计算资源利用率就会降低。这个时候带宽大小以及片上存储就成为瓶颈。考虑片上存储后,通过一个简单模型来分析FPGA计算资源利用率。容易知道数据量和复用率同总计算量的关系:
其中D为数据量,I为数据复用率。那么FPGA运算资源自用率就可以表示为:
5
指令
指令实际上是一些控制FPGA流程的信息,比如载入多少数据,进行哪些运算(conv,pool等)。这些控制信息会根据不同的网络结构编辑好,存储成二进制文件放到ddr中。通过FPGA读入来控制操作。这些指令大体上包括以下几种:
1) load weights/image:从ddr中加载权重或者image数据到片上来。这其中会包含ddr首地址,需要读入的数据长度等信息。
2) conv:这个主要进行卷积运算,包括卷积核大小,图像大小,输入输出通道等信息。
3) activate:激活函数的控制,控制是否进行激活操作。
4) save image:将运算完的结果存储到ddr中,包括ddr地址,长度等信息。
总结
FPGA的灵活可配置结构非常适合不断变化的网络结构,同时其并行化和pipeline优势可以用于神经网络的加速。在进行FPGA设计的时候,需要考虑到并行化方式,存储结构,如何平衡带宽和算力之间的关系。
审核编辑 :李倩





-
新兴DNN推理领域的FPGA2023-09-15 458
-
LVDS一些信号的观点非常亮眼2023-05-25 3267
-
verilog的一些基本概念2022-07-07 2414
-
STM32中遇到的问题--关于串口的一些常见问题2021-12-24 943
-
浅析深度神经网络(DNN)反向传播算法(BP)2021-03-22 4566
-
UIUC推出最新DNN/FPGA协同方案 助力物联网终端设备AI应用2019-06-10 1734
-
时序分析中的一些基本概念2017-02-11 5174
-
有关FPGA学习的一些资料2015-12-03 2704
-
关于FPGA的一些典型问题总结2015-11-04 9371
-
FPGA的一些简单设计资料2014-06-10 2893
-
新手福音:概述学习FPGA的一些常见误区2013-09-27 8588
-
做了个简陋的小台灯,大家给一些意见改进一些吧!!!2012-12-22 10263
-
Protel在线教程:SCH的一些高级设置和常用技巧2010-04-22 1596
全部0条评论

快来发表一下你的评论吧 !
