

KUKA一套程序的建立(序列)
描述
一套程序的建立(序列)
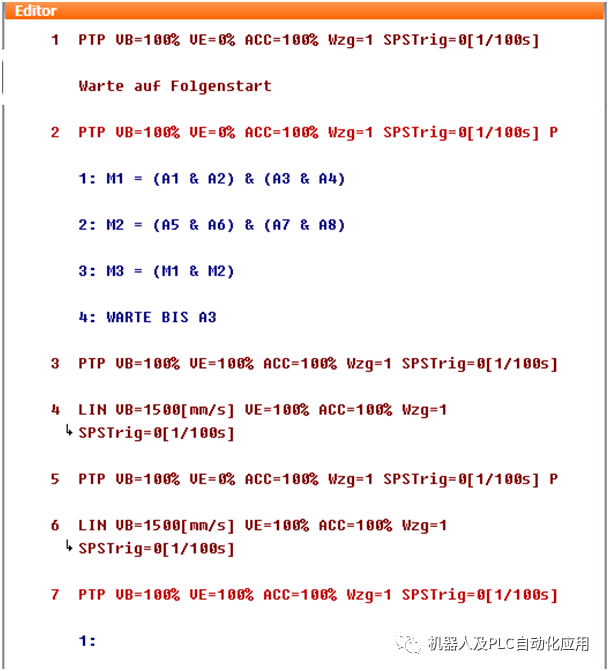
PTP 运动直至序列程序的 PF0 零点,即启动该序列程序的点。
等待程序启动
机器人控制系统等待上一级控制系统给出“程序启动”(SRB)的信号。在该信号给出后则启动此序列程序。
已打开的、带有PLC 指令的点焊 PLC。
| F | 点焊 PLC 包含有移动条件 FB ONL(仅当)。 |
| P | 点焊 PLC 包含有带有行编号的 PLC 指令。 |
| U | 在点焊 PLC 中将调用一个子程序 (通过行指令 UP)。 |
所有带行编号的PLC 指令均将在运动目标点处得以执行。可将其在时间上朝负向移动,以便在到达目标点之前能执行这些指令。为此必须在运动的行指令中对PLC 触发器进行相应的编程。 无行号的 PLC 指令可能位于编定行号的 PLC 指令之前或之后:
位于之前时,将在向目标点运动的过程中执行这些 PLC指令且与 PLC 触发器不同步。例如移动条件 FBONL、等待函数 WARTEONL或闭锁指令。
位于之后时,这些 PLC指令将在所有已编号的 PLC指令执行完毕后在目标点处执行。例如,调用一个子程序。
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
单位已有的一套软件?2012-07-17 3189
-
arm实例来一套2012-12-13 2354
-
一套DAQ设备大概需要多少钱2013-10-22 6148
-
如何设计一套程序对视频中微球数量进行计数和时间记录2014-08-08 2018
-
求一套智能车设计2015-11-10 3266
-
求一套常用的AD封装库2016-01-24 2704
-
分享一套51单片机32灯流水灯程序2016-08-09 14977
-
怎样去搭建一套用于多步时间序列预测的LSTM架构?2021-07-22 2371
-
XMOS推出一套适合iPhone和iPod底座的参考设计2010-02-24 1555
-
一套三菱PLC泰克人机程序2022-03-22 837
-
三联屏一套多少钱_配一套三联屏需要什么设备(电脑)2018-03-21 24728
-
altiumdesigner多少钱一套2022-04-07 36448
-
大众版KUKA程序的轨迹程序分解2022-07-08 4737
-
一套简单的机器视觉系统包括哪些部分?2023-08-20 1138
-
KUKA VVS:一套程序的建立(序列)2024-01-16 1025
全部0条评论

快来发表一下你的评论吧 !
