

陀螺仪的基础知识和结构
描述
陀螺仪是一种测量物体旋转速度的传感器。陀螺仪的工作原理对许多工程师来说可能是神秘的。
考虑到这一点,并且受到 来自 Analog Devices 的一篇文章的启发,本文试图对MEMS振动陀螺仪背后的理论进行更详细的解释。由于全面的分析可能涉及数学密集型,我们将尝试考虑传感器的特殊方向,以尽可能简化讨论。
使用极坐标系定位旋转对象
使用极坐标系可以更容易地描述旋转物体的位置。假设,如下图 1 所示,对象始终位于 XY 平面内。
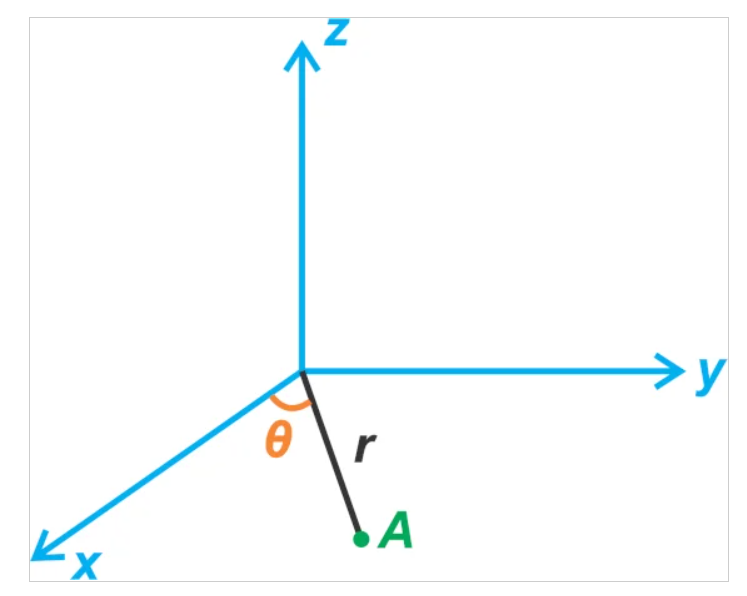
图 1. XYZ 平面上的示例对象。
随着 θ 的变化,点 A 围绕 z 轴旋转。您可能记得在数学课中,单位向量 ^rr^ 和 ^θθ^ 是为极坐标系定义的,如图 2 所示,以唯一地指定坐标系中的一个点XY 平面。
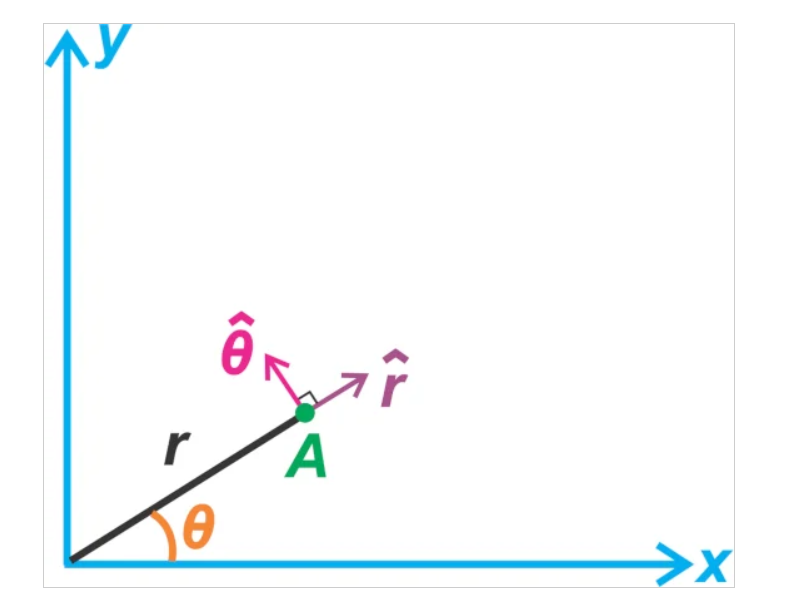
图 2. 极坐标系示例。
第一项考虑了一个明显的点:如果我们保持 θ 不变,我们仍然可以通过将物体与原点的距离改变 Δr 来改变物体的位置,如图 3 所示。在这种情况下,速度应该具有径向分量,即在$$\hat{r}$$的方向。^rr^.
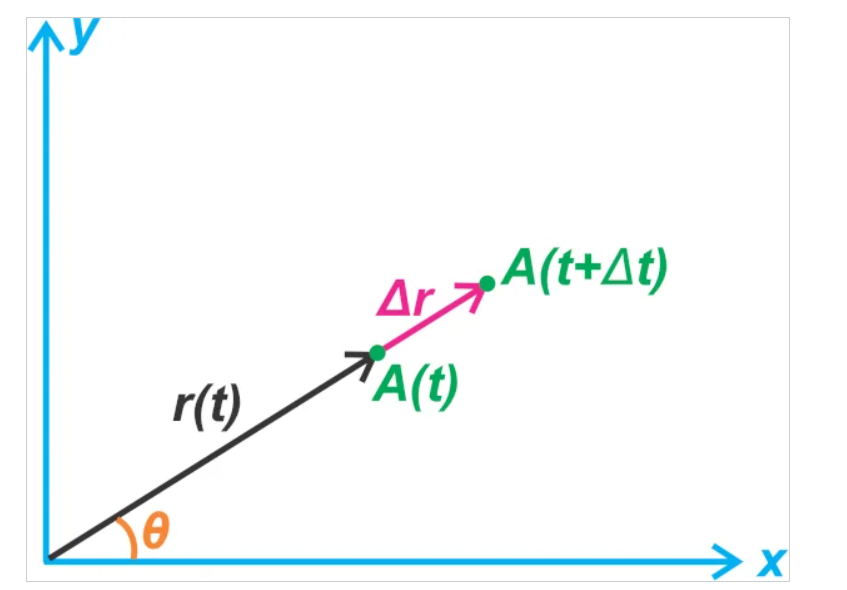
图 3. 通过改变距离来改变物体的位置。
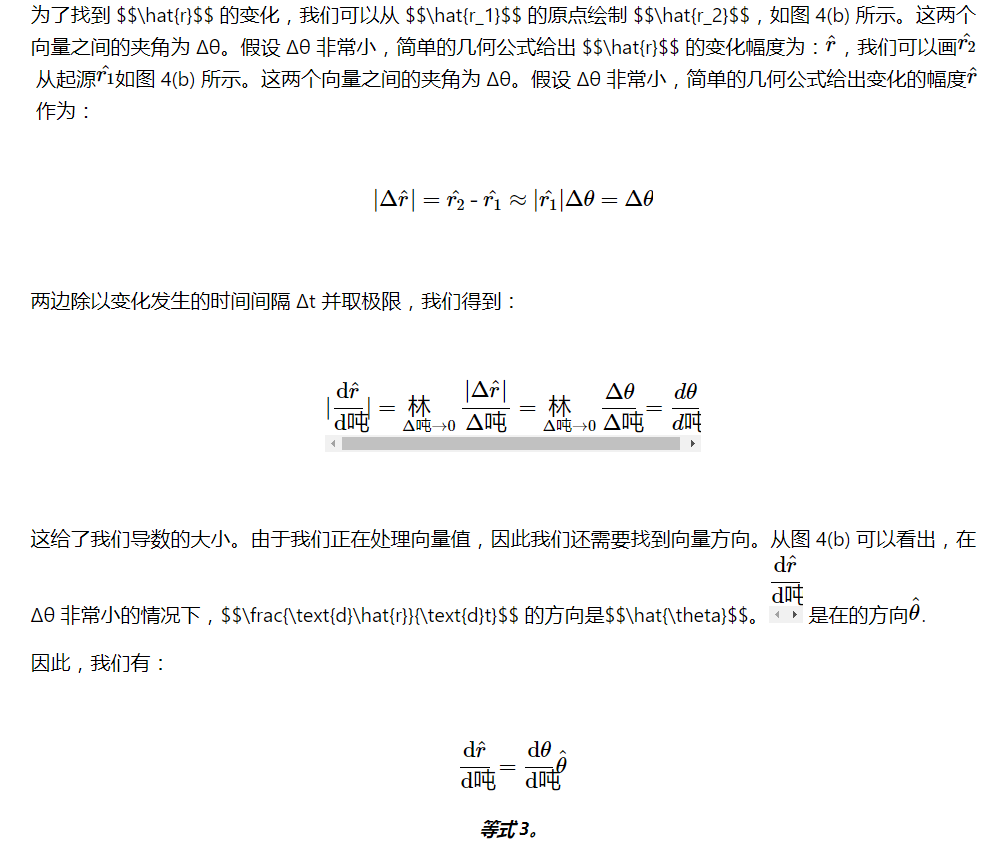
等式 2 中的第二项考虑了这样一个事实:即使与原点的距离是恒定的,物体的位置也会因旋转而改变。请记住,尽管 $$\hat{r}$$ 的长度为 1,但它的方向取决于 θ 并且可以随时间变化。图 4(a) 显示了如果我们保持 r 不变并将角度增加 Δθ,则位置如何变化。^rr^长度为 1,它的方向取决于 θ 并且可以随时间变化。图 4(a) 显示了如果我们保持 r 不变并将角度增加 Δθ,则位置如何变化。
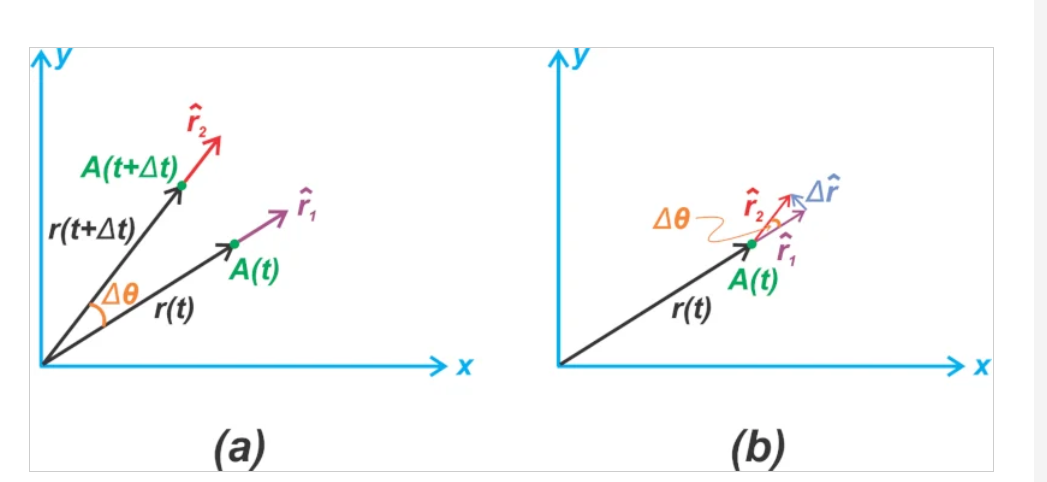
图 4. 如果 r 为常数且角度增加 Δθ (a) 并找到该变化 (b) 时位置如何变化的示例。
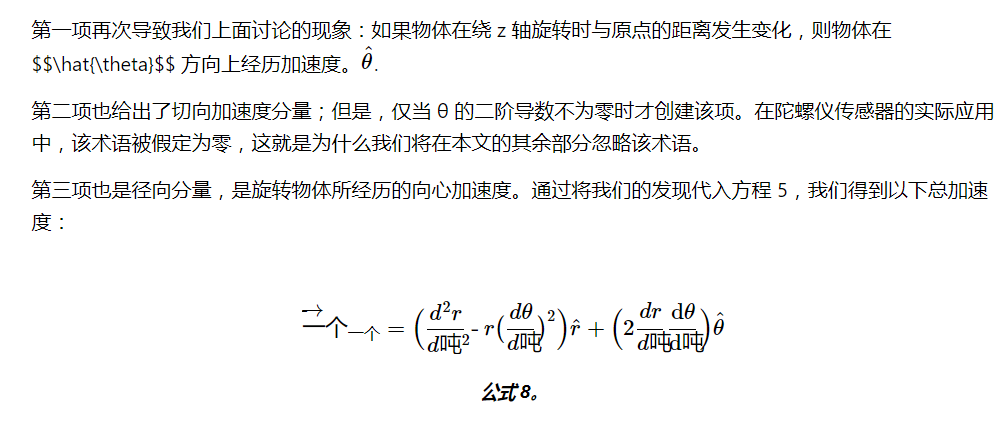
VA→=drdtr^+rdθdtθ^
洞察方程式
等式 8 中的切线项是振动陀螺仪运行的关键。让我们更仔细地研究一下这个术语是如何创建的。图 5 显示了珠子沿旋转轮辐移动的轨迹。
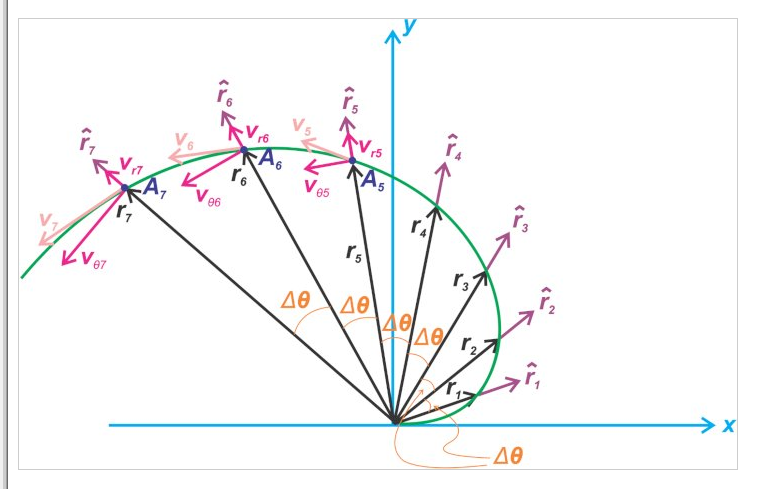
图 5. 显示珠沿旋转轮辐轨迹的示例。
vθ=rdθd吨=rωvθ=rdθdt=rω
图 5 显示了位置 A5、A6 和 A7 的这些速度分量。在我们的示例中,径向分量的大小是恒定的,但是切向分量呢?
由于 ⍵ 是常数,因此速度的切向分量随 r 增加。换句话说,当我们远离原点时,珠子必须在给定的时间间隔和 Δθ 内移动更长的距离。通过比较连续位置向量之间的距离,您可以清楚地看到这一点。
另一个问题是由于这种现象,切向速度的变化速度有多快?
对于给定的 ⍵,给出加速度的切向分量的切向速度的变化率等于 r 的变化率。因此,切向加速度的一个分量由下式给出:

MEMS陀螺仪的基本结构
图 6 显示了振动陀螺仪的基本结构。
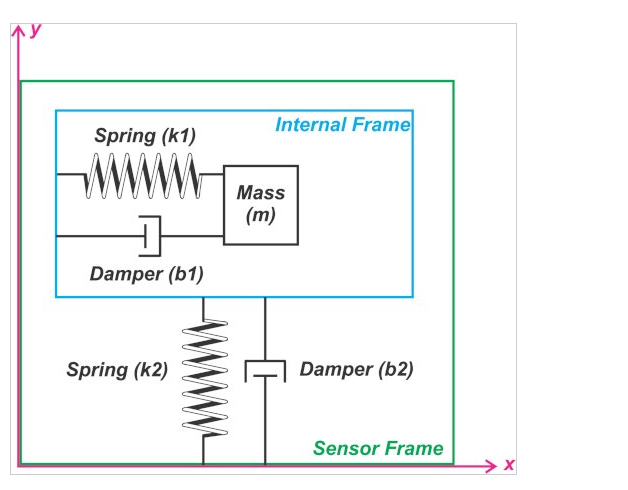
图 6. 振动陀螺仪的示例结构。
质量 (m) 通过阻尼弹簧结构连接到“内部框架”。此外,由正反馈系统(上面未显示)控制的致动器用于驱动质量进入谐波振荡。如图所示,反馈系统保证质量保持在沿 x 轴的可调节连续振荡中。此外,内部框架通过相对于质量振荡方向呈 90° 的第二阻尼弹簧结构连接到“传感器框架”。当在该方向上存在力时,这种配置允许内部框架能够在 y 轴方向上移动。
正如我们将在下一节中看到的,当传感器绕垂直于图中所示 XY 平面的轴旋转时,图 6 所示的结构可以检测角速度。
振动陀螺仪如何工作?
假设,如图 7 所示,陀螺仪固定在逆时针方向旋转的平台上。
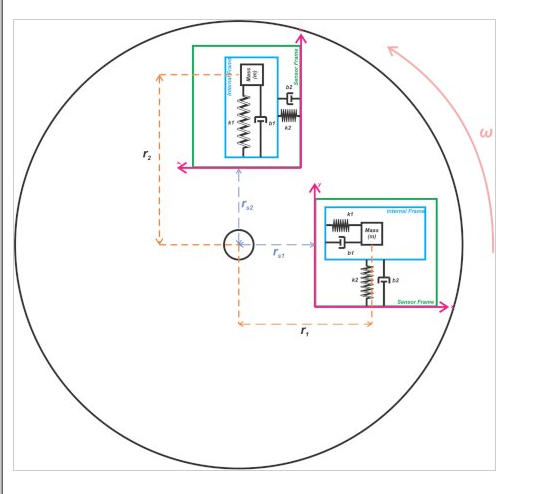
图 7. 固定平台上逆时针旋转的陀螺仪。
该图显示了两个不同时刻的传感器。尽管传感器封装与平台中心的距离是固定的,但我们知道质量距离从 r 1变为 r 2是由于其在传感器框架的 x 方向上的振荡。在此示例中,质量距离增加 r 2 》 r 1。
与图 5 中描述的磁珠示例类似,检测质量在传感器 y 轴的正方向上经历切向加速度。在 y 方向上,质量块刚性连接到内部框架。因此,同样的加速度也适用于内部框架。内部框架;然而,最初倾向于保持静止,这会改变内部框架相对于传感器框架的相对位置。
-
什么是光纤陀螺仪?陀螺仪有哪些作用?2025-08-26 2819
-
陀螺仪的基本组成 陀螺仪的工作原理 陀螺仪的作用2023-12-07 6714
-
怎么解决陀螺仪角度漂移问题 三轴陀螺仪和六轴陀螺仪的区别2023-08-21 9848
-
什么是MEMS陀螺仪?2023-07-07 6269
-
MEMS IMU/陀螺仪对准的基础知识2023-01-08 6764
-
微机械陀螺仪工作原理_微机械陀螺仪的应用2021-02-01 14544
-
工业和汽车级MEMS陀螺仪的应用2020-07-14 5528
-
光纤陀螺仪与旋转式陀螺仪的工作原理解析2019-10-10 9778
-
分析三轴陀螺仪的工作原理及应用2018-10-23 20441
-
浅谈MEMS陀螺仪技术 MEMS是否取代光纤陀螺仪技术2018-07-30 14685
-
陀螺仪有什么用_陀螺仪的特性图解_陀螺仪的应用2017-12-01 14495
-
详解三轴陀螺仪的技术原理2016-10-26 5861
-
三轴陀螺仪是什么_三轴陀螺仪在手机上的应用2012-08-30 9397
-
中国自己的MEMS陀螺仪诞生2009-12-07 1793
全部0条评论

快来发表一下你的评论吧 !
