

基于RTK GPS和图像识别的无人机精准降落方案
军用/航空电子
描述
1、概述
无人机自诞生以来,主要应用于军事方面,作为智能化和信息化的武器,无人机在侦察、监视、通信、远距离攻击等方面发挥了重要的作用。近年来,无人机在民用方面的应用也越来越多,各国在无人机的民用方面逐渐开放,无人机已经广泛应用于公共安全、应急搜救、农林、环保、交通、通信、气象、影视航拍等多个领域。
随着无人机在生产生活中逐渐获得更大的用途,特别是近年来诞生了无人机固定机场和移动机场,对无人机的精准识别和降落的要求也就越来越高。
现阶段应用较多的无人机精准降落方案主要有:RTK GPS和图像识别(视觉)。
2. 基于RTK GPS的无人机精准降落方案
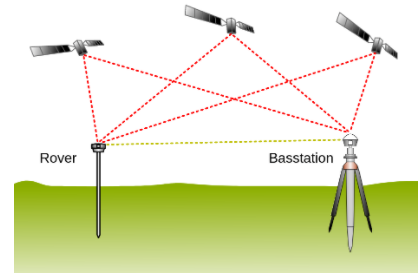
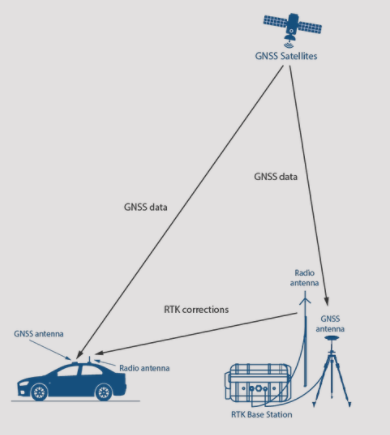
RTK 有两个重要概念:固定站(也就参考站)和移动站。固定站顾名思义就是固定在地面上为移动站提供参考基准的基站,在使用过程中不可移动,固定基站、云基站和移动基站都是固定站;移动站是进行作业的设备,它使用固定站发送来的差分数据进行 RTK 精准定位,无人机和测绘器都是移动站。
RTK(Real Time Kinematic)实时动态测量技术,是以载波相位观测为根据的实时差分GPS(RTD GPS)技术,它是测量技术发展里程中的一个突破,它由基准站接收机、数据链、 流动站接收机三部分组成。 在基准站上安置1台接收机为参考站, 对卫星进行连续观测,并将其观测数据和测站信息,通过无线电传输设备,实时地发送给流动站,流动站GPS接收机在接收GPS卫星信号的同时,通过无线接收设备,接收基准站传输的数据,然后根据相对定位的原理,实时解算出流动站的三维坐标及其精度(即基准站和流动站坐标差△X、△Y、△H,加上基准坐标得到的每个点的WGS-84坐标,通过坐标转换参数得出流动站每个点的平面坐标X、Y和海拔高H)。
无人机通过RTK GPS实现无人机精准降落的方式主要依靠RTK GPS定位精度可达厘米级这一特性实现的。只需要给定精准的目标降落位置,再结合无人机自身精准的实时位置即可实现无人机精准降落。(与视觉相比)缺点就是:系统需要依赖的组件多(移动站、固定站、天线、无线数传等),成本昂贵。
3、基于图像识别(视觉)的无人机精准降落方案
另一种实现无人机精准降落的方法是基于图像识别(视觉)。其中,也有多种不同的实现方式,比如:通过识别apritag或者aruco的方式;通过深度学习识别图像特征;通过识别红外LED灯珠等。
3.1、基于Apritag或者Aruco
https://april.eecs.umich.edu/software/apriltag.html
http://www.uco.es/investiga/grupos/ava/node/26
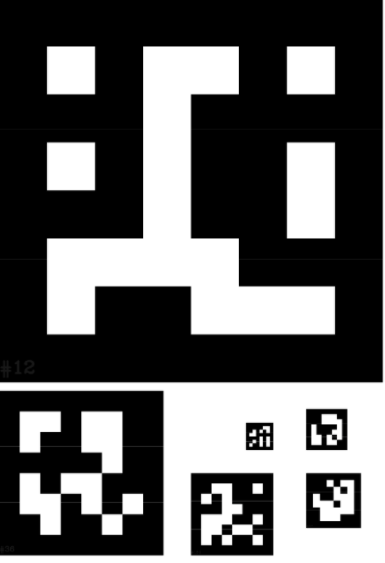
AprilTag/Aruco是一个视觉基准库,在AR,机器人,相机校准领域广泛使用。通过特定的标志(与二维码相似,但是降低了复杂度以满足实时性要求),可以快速地检测标志,并计算相对位姿。
3.2 基于识别红外LED灯珠的方式
与基于apritag或者aruco不同,基于识别红外灯珠的方式得到的是像素的相对偏移量,而不是直接就可以得到相对位置,因此基于这种方式实现的精准降落还必须配备一个Z轴的测距传感器才可准确估计出水平的相对位置,从而实现无人机的精准降落。
阿木实验室的精准降落模块就是基于识别红外LED灯珠的方式实现的。
模块分为两个部分:单目相机和红外信标
单目相机使用主频为204MHz的双核处理器,并且搭配一颗FOV为90度的镜头,里面运行了基于色调的快速图像跟踪算法。
红外信标由30颗波长为900nm的红外LED灯矩阵组成。单目相机最远可在20米左右的距离就可追踪到红外信标的红外光源。
由于红外信标是主动光源,相比于其他视觉方案,可在白天或者夜间都可进行视觉识别。

-
无人机技术路线2026-07-10 497
-
无人机激光传感器辅助降落原理2026-02-10 995
-
高帧频图像识别反无人机 慧视有办法!2024-12-04 1451
-
如何使用Python进行图像识别的自动学习自动训练?2024-01-12 1969
-
浅析无人机图像识别视觉精准降落技术2023-10-09 3552
-
无人机反制设备的原理是什么?2022-09-13 11799
-
各类反无人机技术的优势2022-08-25 28028
-
常见的无人机基础知识问答2019-07-11 4052
-
一款既有固定翼无人机的高速巡航优势又能垂直起降、精准悬停的倾转旋翼无人机2018-07-31 16393
-
基于无人机的视觉传感网和图像识别中心的建设2018-06-12 3415
-
SKYLAB详解无人机GPS模块的作用及无人机gps模块选型2017-06-22 7492
-
剖析三星七频无人机天线搭配差分GPS模块精准定位定向2016-05-26 4122
-
无人机遥感技术2016-03-11 8259
-
【TL6748 DSP申请】无人机超视觉图像识别系统2015-09-09 2176
全部0条评论

快来发表一下你的评论吧 !
