

 扫地机器人的两种测距方式:TOF激光雷达和三角测距
扫地机器人的两种测距方式:TOF激光雷达和三角测距
电子说
描述
当扫地机器人要在陌生环境中实现自主移动时
它主要面临三个问题:
第一个是定位问题,在一个环境中,扫地机器人需要知道自身的位置。
第二个是地图构建问题,机器人在一个陌生环境中移动,需要进行地图的构建,认识周边环境。
第三个是路径规划问题,根据已有的地图和已知的自身位置,实现自主移动。
激光雷达是扫地机器人感知外部环境的眼睛,扫地机器人通过激光雷达获取环境点云数据,从而绘制环境地图,为室内定位和路径导航奠定基础。
随着传感器技术的发展,激光雷达技术也达到全新的水平,从原理上看目前主流的有飞行时间测距(TOF)和三角测距两种。
何为飞行时间测距(TOF)?
简单来说,就是计算光的“飞行时间”。
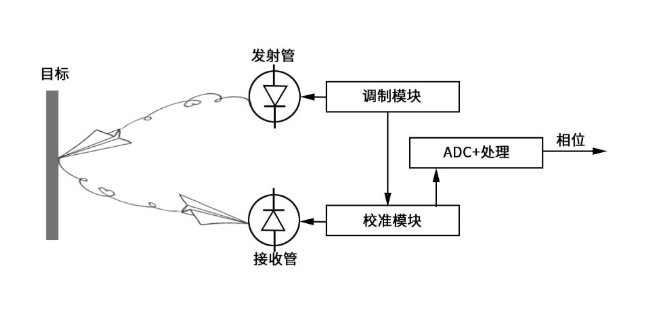
由激光器发射一个激光脉冲,通过计时器记录下光的出射和回返的时间,两个时间相减即可得到光的“飞行时间”,而光速是固定的,根据已知速度和时间就可以计算出距离。
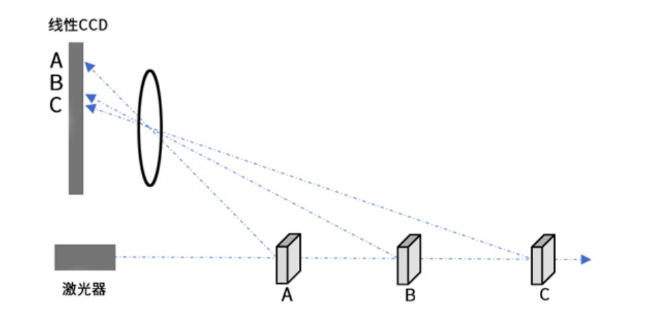
何为三角测距?
三角测距采用激光器发射激光,在照射到物体之后,反射光会由线性CCD接收,因为激光器和探测器间隔了一段距离,所以根据光学路径,不同距离的物体将会在CCD上成像在不同的位置,按照三角公式进行计算,就可以推导出被测物体的距离。
从原理上来说,三角测距的目标物体距离越远,在CCD上的位置差别就越小,以致于在超过某个距离后,CCD几乎无法分辨,而TOF激光雷达采用脉冲激光采样,并且还能严格控制视场以减少环境光的影响,可以测量的距离更远。
激光雷达的采样率决定了每一帧图像的点云数目以及点云的角分辨率,点云数越多,角分辨率越高,则图像对周围环境的描绘就越细致。
三角测距激光雷达在测量距离比较远的时候,精度迅速下降,一般只能在短距离范围内使用.而TOF激光雷达是依赖飞行时间,时间测量精度并不随着长度增加有明显变化,因此大多数TOF激光雷达在几十米的测量范围内都能保持超高精度。
在长途运输过程中,存储温度和振动对雷达可靠性的影响不容忽视。特别是出口海运,集装箱里温度往往会超过70℃。相比TOF激光雷达,三角测距激光雷达更容易受温度和振动的影响,精度出现不良的概率比TOF激光雷达要高很多。
TOF激光雷达虽然已经成为扫地机器人中的“王牌”,但在实际应用时还是会遇到一些挑战,并且相比三角测距法,TOF要攻克的难关要难得多。
审核编辑 黄昊宇
-
扫地机器人方案2015-05-18 10621
-
原来扫地机器人是这样工作的!2015-12-24 31568
-
小米扫地机器人上手:家居能手2016-09-28 8348
-
智能扫地机器人解决方案2017-05-27 8811
-
激光雷达分类以及应用2017-09-19 8926
-
自动驾驶激光雷达新型探测器:近红外MPPC2018-09-10 6105
-
智能扫地机器人用什么马达2018-10-12 7082
-
机器人和激光雷达都不可或缺2019-02-15 6239
-
TOF激光雷达2019-06-07 9321
-
扫地机器人自动回充的技术原理是什么2021-09-14 5600
-
扫地机器人激光雷达下半场:品质是核心竞争壁垒2020-03-27 2839
-
激光雷达类型:TOF雷达与三角测距雷达2020-12-26 5075
-
探究单线激光雷达原理:三角测距 VS ToF测距2021-04-09 8724
-
基于激光三角测距法的激光雷达原理2023-12-25 2457
-
阐述基于激光三角测距法的激光雷达原理2023-12-27 2726
全部0条评论

快来发表一下你的评论吧 !
