

使用STM32F103做CAN的收发通信
描述
CAN通信
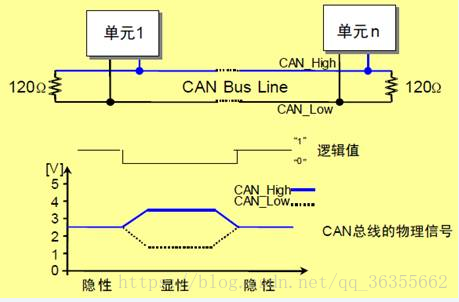
CAN 是Controller Area Network 的缩写(以下称为CAN),该通信使用的是ISO11898标准,该标准的物理层特征如下图所示。
CAN协议是通过以下5种类型的帧进行的:
-
数据帧
-
摇控帧
-
错误帧
-
过载帧
-
帧间隔
另外,数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有11 个位的标识符(ID),扩展格式有29 个位的ID。
大部分系统使用的都是数据帧 ,我这里使用的也是数据帧。
数据帧一般由7个段构成,即:
(1) 帧起始。表示数据帧开始的段。
(2) 仲裁段。表示该帧优先级的段。
(3) 控制段。表示数据的字节数及保留位的段。
(4) 数据段。数据的内容,一帧可发送0~8个字节的数据。
(5) CRC段。检查帧的传输错误的段。
(6) ACK段。表示确认正常接收的段。
(7) 帧结束。表示数据帧结束的段。
明确了数据帧概念,还需要理解一下过滤器的作用。
STM32的标识符屏蔽滤波目的是减少了CPU处理CAN通信的开销。STM32的过滤器组最多有28个(互联型),但是STM32F103ZET6只有14个(增强型),每个滤波器组x由2个32为寄存器,CAN_FxR1和CAN_FxR2组成。
STM32每个过滤器组的位宽都可以独立配置,以满足应用程序的不同需求。根据位宽的不同,每个过滤器组可提供:
-
1个32位过滤器,包括:STDID[10:0]、EXTID[17:0]、IDE和RTR位
-
2个16位过滤器,包括:STDID[10:0]、IDE、RTR和EXTID[17:15]位
此外过滤器可配置为,屏蔽位模式和标识符列表模式。
在屏蔽位模式下,标识符寄存器和屏蔽寄存器一起,指定报文标识符的任何一位,应该按照“必须匹配”或“不用关心”处理。
而在标识符列表模式下,屏蔽寄存器也被当作标识符寄存器用。因此,不是采用一个标识符加一个屏蔽位的方式,而是使用2个标识符寄存器。接收报文标识符的每一位都必须跟过滤器标识符相同。相关文章:CAN总线详解。
一般也都是使用标识符列表模式,这里使用的也是标识符列表模式。滤波过程举例如下:
在程序中就是:
//要过滤的ID高位CAN_FilterInitStructure.CAN_FilterIdHigh=0X00;//要过滤的ID低位CAN_FilterInitStructure.CAN_FilterIdLow= (((u32)0x1314<<3)|CAN_ID_EXT|CAN_RTR_DATA)&0xFFFF;//过滤器屏蔽标识符的高16位值CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0xFFFF;//过滤器屏蔽标识符的低16位值CAN_FilterInitStructure.CAN_FilterMaskIdLow=0xFFFF;
这里的CAN_FilterId和CAN_FilterMaskId是配合使用的,意思是CAN_FilterId指出需要屏蔽ID的什么内容,什么格式;CAN_FilterMaskId是指CAN_FilterId的每一位是否需要过滤,若CAN_FilterMaskId在某位上是1的话,ID对应位上的数值就必须和CAN_FilterId该位上的一样,保持一致,反之则是“不关心”。
上述程序的设置的含义就是:只接收来自0x1314的数据,屏蔽其他ID的数据。
程序思路
这里准备做一个主机与从机的通信,主要用扩展标识符ExtId来区分,分配的标识符是: 主机:0x1314 从机:0x1311
主机负责接收所有从机的数据,不需要过滤,用扩展标识符ExtId来区分不同从机的数据;主机还可以向不同从机发送信息。而从机则只接收来自主机的数据,同样用扩展标识符ExtId来区分是否是发向自己的数据;同时,也能够向主机发送信息。
相关代码
代码也是非常简单的,这里贴出了主机和从机的can.c和can.h两个文件。
从机相关代码
can.c文件:
/* 在中断处理函数中返回 *///__IO uint32_t ret = 0;//接收数据缓冲器u8 RxBuf[5];u8 Rx_flag=0;void CAN1_Init(void){GPIO_InitTypeDef GPIO_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;CAN_InitTypeDef CAN_InitStructure;CAN_FilterInitTypeDef CAN_FilterInitStructure;/* 复用功能和GPIOB端口时钟使能*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOB, ENABLE);/* CAN1 模块时钟使能 */RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);/* Configure CAN pin: RX */ // PB8GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入GPIO_Init(GPIOB, &GPIO_InitStructure);/* Configure CAN pin: TX */ // PB9GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_Init(GPIOB, &GPIO_InitStructure);//#define GPIO_Remap_CAN GPIO_Remap1_CAN1 本实验没有用到重映射I/OGPIO_PinRemapConfig(GPIO_Remap1_CAN1, ENABLE);//CAN_NVIC_Configuration(); //CAN中断初始化/* Configure the NVIC Preemption Priority Bits */NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);/* Set the Vector Table base location at 0x20000000 */NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);/* Set the Vector Table base location at 0x08000000 */NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);/* enabling interrupt */NVIC_InitStructure.NVIC_IRQChannel=USB_LP_CAN1_RX0_IRQn;;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);//CAN_INIT();//CA初始化N模块/* CAN register init */CAN_DeInit(CAN1); //将外设CAN的全部寄存器重设为缺省值CAN_StructInit(&CAN_InitStructure); //把CAN_InitStruct中的每一个参数按缺省值填入/* CAN cell init */CAN_InitStructure.CAN_TTCM=DISABLE; //没有使能时间触发模式CAN_InitStructure.CAN_ABOM=DISABLE; //没有使能自动离线管理CAN_InitStructure.CAN_AWUM=DISABLE; //没有使能自动唤醒模式CAN_InitStructure.CAN_NART=DISABLE; //没有使能非自动重传模式CAN_InitStructure.CAN_RFLM=DISABLE; //没有使能接收FIFO锁定模式CAN_InitStructure.CAN_TXFP=DISABLE; //没有使能发送FIFO优先级CAN_InitStructure.CAN_Mode=CAN_Mode_Normal; //CAN设置为正常模式CAN_InitStructure.CAN_SJW=CAN_SJW_1tq; //重新同步跳跃宽度1个时间单位CAN_InitStructure.CAN_BS1=CAN_BS1_3tq; //时间段1为3个时间单位CAN_InitStructure.CAN_BS2=CAN_BS2_2tq; //时间段2为2个时间单位CAN_InitStructure.CAN_Prescaler=60; //时间单位长度为60CAN_Init(CAN1,&CAN_InitStructure); //波特率为:72M/2/60(1+3+2)=0.1 即波特率为100KBPs// CAN filter init 过滤器,注意,只接收主机发过来的数据,屏蔽其他数据CAN_FilterInitStructure.CAN_FilterNumber=1; //指定过滤器为1CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask; //指定过滤器为标识符屏蔽位模式CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //过滤器位宽为32位//CAN_FilterInitStructure.CAN_FilterIdHigh= (((u32)0x1314<<3)&0xFFFF0000)>>16;CAN_FilterInitStructure.CAN_FilterIdHigh=0X00; //要过滤的ID高位CAN_FilterInitStructure.CAN_FilterIdLow= (((u32)0x1314<<3)|CAN_ID_EXT|CAN_RTR_DATA)&0xFFFF; //要过滤的ID低位CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0xFFFF; //过滤器屏蔽标识符的高16位值CAN_FilterInitStructure.CAN_FilterMaskIdLow=0xFFFF; //过滤器屏蔽标识符的低16位值CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_FIFO0; //设定了指向过滤器的FIFO为0CAN_FilterInitStructure.CAN_FilterActivation=ENABLE; //使能过滤器CAN_FilterInit(&CAN_FilterInitStructure); //按上面的参数初始化过滤器/* CAN FIFO0 message pending interrupt enable */CAN_ITConfig(CAN1,CAN_IT_FMP0, ENABLE); //使能FIFO0消息挂号中断}/* 发送两个字节的数据*/u8 CAN_SetMsg(u8 Data1,u8 Data2){u8 mbox;u16 i=0;CanTxMsg TxMessage;TxMessage.StdId=0x0000; //标准标识符为0x00TxMessage.ExtId=0x1311; //扩展标识符0x1311,可以更改该标识符以示区分不同从机TxMessage.IDE=CAN_ID_EXT; //使用扩展标识符TxMessage.RTR=CAN_RTR_DATA; //为数据帧TxMessage.DLC=2; //消息的数据长度为2个字节TxMessage.Data[0]=Data1; //第一个字节数据TxMessage.Data[1]=Data2; //第二个字节数据//发送数据mbox= CAN_Transmit(CAN1, &TxMessage);while((CAN_TransmitStatus(CAN1, mbox)==CAN_TxStatus_Failed)&&(i<0XFFF))i++; //等待发送结束if(i>=0XFFF)return 0;return 1;}u8 CAN_GetMsg(u8 *msg1,u8 *msg2){if(Rx_flag == 1)//发现数据{*msg1=RxBuf[0];*msg2=RxBuf[1];Rx_flag=0;//数据已经取走,可以更新数据return 1;}elsereturn 0;}/* USB中断和CAN接收中断服务程序,USB跟CAN公用I/O,这里只用到CAN的中断。*/void USB_LP_CAN1_RX0_IRQHandler(void){CanRxMsg RxMessage;RxMessage.StdId=0x00;RxMessage.ExtId=0x00;RxMessage.IDE=0;RxMessage.DLC=0;RxMessage.FMI=0;RxMessage.Data[0]=0x00;RxMessage.Data[1]=0x00;CAN_Receive(CAN1,CAN_FIFO0, &RxMessage); //接收FIFO0中的数据if(Rx_flag == 0)//数据已取走或者缓冲器为空{RxBuf[0]=RxMessage.Data[0];RxBuf[1]=RxMessage.Data[1];Rx_flag=1;//数据已经备好,等待取走}}
can.h文件
主机相关代码
这里主机代码大部分是和从机类似的,就只贴出不同的地方了。 can.c文件:
/* 在中断处理函数中返回 *///__IO uint32_t ret = 0;void CAN1_Init(void){......//以上与从机部分相同//CAN filter init 过滤器,已经设置为任意,可以通过ExtId标识符区分从机代号CAN_FilterInitStructure.CAN_FilterNumber=1; //指定过滤器为1CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask; //指定过滤器为标识符屏蔽位模式CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //过滤器位宽为32位CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000; //过滤器标识符的高16位值CAN_FilterInitStructure.CAN_FilterIdLow=CAN_ID_EXT|CAN_RTR_DATA;//过滤器标识符的低16位值CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000; //过滤器屏蔽标识符的高16位值CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000; //过滤器屏蔽标识符的低16位值CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_FIFO0; //设定了指向过滤器的FIFO为0CAN_FilterInitStructure.CAN_FilterActivation=ENABLE; //使能过滤器CAN_FilterInit(&CAN_FilterInitStructure); //按上面的参数初始化过滤器/* CAN FIFO0 message pending interrupt enable */CAN_ITConfig(CAN1,CAN_IT_FMP0, ENABLE); //使能FIFO0消息挂号中断}//接收数据缓冲器u8 CAN_RX_BUF[CAN_RX_LEN]={0}; //接收缓冲,最大USART_REC_LEN个字节.//接收标志位u8 Rx_flag=0;/* USB中断和CAN接收中断服务程序,USB跟CAN公用I/O,这里只用到CAN的中断。*/void USB_LP_CAN1_RX0_IRQHandler(void){u8 i=0;CanRxMsg RxMessage;RxMessage.StdId=0x00;RxMessage.ExtId=0x00;RxMessage.IDE=0;RxMessage.DLC=0;RxMessage.FMI=0;CAN_Receive(CAN1,CAN_FIFO0, &RxMessage); //接收FIFO0中的数据if(Rx_flag == 0)//数据已取走或者缓冲器为空{if((RxMessage.DLC) == 2)//是否收到2位字节数据{CAN_RX_BUF[0]=RxMessage.Data[0];CAN_RX_BUF[1]=RxMessage.Data[1];}}}/* 发送两个字节的数据*/u8 CAN_SendMsg(u8* data1, u8* data2){u8 mbox;u16 i=0;CanTxMsg TxMessage;TxMessage.StdId=0x0000; //标准标识符为0x00TxMessage.ExtId=0x1314; //扩展标识符0x0000TxMessage.IDE=CAN_ID_EXT; //使用扩展标识符TxMessage.RTR=CAN_RTR_DATA; //为数据帧TxMessage.DLC=2; //消息的数据长度为2个字节TxMessage.Data[0]=Data1; //第一个字节数据TxMessage.Data[1]=Data2; //第二个字节数据//发送数据mbox= CAN_Transmit(CAN1, &TxMessage);while((CAN_TransmitStatus(CAN1, mbox)==CAN_TxStatus_Failed)&&(i<0XFFF))i++; //等待发送结束if(i>=0XFFF)return 0;//发送失败return 1;//发送成功}u8 CAN_GetMsg(u8 *msg1,u8 *msg2){if(Rx_flag == 1)//发现数据{*msg1=CAN_RX_BUF[0];*msg2=CAN_RX_BUF[1];Rx_flag=0;//数据已经取走,可以更新数据return 1;}elsereturn 0;}void Clear_canBuffer(void){Rx_flag=0;//清楚接收标志位memset(CAN_RX_BUF, 0, sizeof(u8)*CAN_RX_LEN);//清空缓冲区}u8 Check_canRX(void){return (Rx_flag == 6);}
can.h文件:
extern u8 CAN_RX_BUF[CAN_RX_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符void CAN1_Init(void);u8 CAN_SendMsg(u8* data1, u8* data2);u8 CAN_GetMsg(u8 *msg1,u8 *msg2);
文章出处:【微信公众号:STM32嵌入式开发】欢迎添加关注!文章转载请注明出处。
-
基于STM32F103实现CAN数据收发的功能2021-08-19 1487
-
如何使用STM32F103做CAN的收发通信?2021-12-15 1591
-
基于STM32F103的SVPWM算法实现2022-03-22 2102
-
STM32F103封装方式与功能配置2016-08-03 22511
-
STM32F103的振动监测系统设计2017-09-28 1955
-
STM32F103使用总结2017-10-24 3769
-
stm32f103移植2017-10-27 1951
-
STM32F103教程之STM32F103单片机的使用心得资料免费下载2018-09-26 3117
-
STM32F103 CAN模板程序2020-11-09 2338
-
stm32f030和stm32f103功能差异2021-07-22 25094
-
STM32F103学习笔记三 串口通信2021-11-25 1472
-
GD32F103与STM32F103的区别 2021.6.22021-12-08 3487
-
用STM32F103做CAN的收发通信的程序思路与代码分享2022-06-14 13865
-
STM32F103开源分享2022-08-22 3078
-
使用STM32F103做CAN的收发通信2023-02-12 4361
全部0条评论

快来发表一下你的评论吧 !
