

KRC内部安全如何控制
描述
首先 安全功能涉及以下部件:
控制系统 PC 机中的安全控制系统
库卡控制面板 (库卡 smartPAD)
控制柜 (CCU)
分解器数字转换器 (RDC)
库卡 PowerPack (KPP)
库卡 ServoPack (KSP)
----------------------------------------

驱动装置接通 = 造作人员防护装置+SAFETY运行许可FF+SAFETY 驱动装置开通 AF
BS 操作人员防护装置
用于访问防护区的输入端。在自动模式下,信号触发 Stop 1。即使任何一扇防护门关上,机器人也不允许重新开动,所以必须对功能取消进行确认。
安全停止 Stop1 (所有轴)
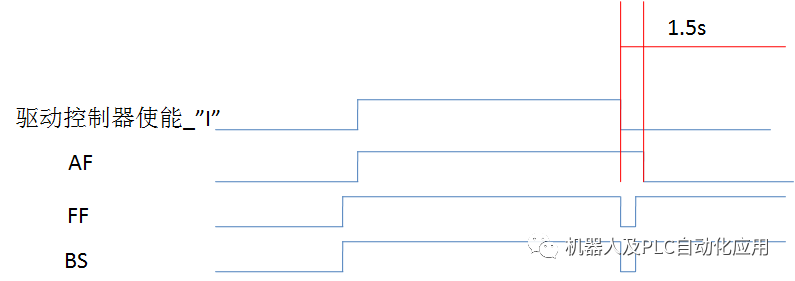
用于安全停止 Stop1 的信号。触发大坡度的斜面停止。机器人以最快速度在安全技术作用下停止。所有轴顺沿预定轨迹停止运动。驱动装置在进入静止状态后关机。FF(运行许可)设为 0 。US2电压关断,AF (驱动许可)在1.5 秒后设为 0 。

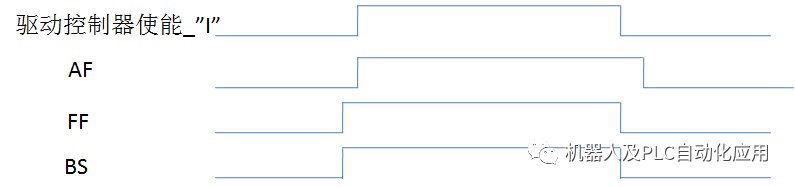
AF 驱动许可 (KRC 内部安全控制已许可驱动装置开机)
| 0 = 驱动许可未激活 | (机器人控制系统必须关闭驱动装置) |
| 1 = 驱动许可已激活 | (机器人控制系统允许将驱动装置切换至受控状态) |
FF (运行许可)(KRC 内部安全控制系统已准许机器人动作)
| 0 = FF (运行许可)未激活 | (机器人控制系统必须停止当前运动) |
| 1 = FF (运行许可)已激活 | (机器人控制系统允许促使运动执行) |
闪断没有使能的原因时: 安全门关闭后,机器人安全驱动许可没有关闭AF,就再次激活安区门,使得AF无法被触发激活,使得驱动控制器”I”使能给不上 .
RK100=10
MERK1=$ALARM_STOP AND $USER_SAF 安全监控
$OUT[RK100]=MERK1 A10 机器人RK100驱动准备就绪
$USER_SAF
如果安全围栏监控开关打开(AUT 模式)或使能开关释放(T1 或 T2 模式),此输出将复位。
$USER_SAF 为 TRUE 的条件取决于控制器型号和操作模式:
KR C4
T1, T2 启用开关被按下。
AUT, AUT EXT 物理保护已关闭。
VKR C4
T1 启用开关被按下。E2 关闭。
T2 启用开关被按下。2 和 E7 关闭。
AUT EXT 物理保护已关闭。E2 和 E7 打开。
原文标题:KUKA C4 使能"I"控制浅谈
文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
-
安全监测控制电路2018-03-31 1940
-
如何使用STM32微控制器的安全限速?2023-01-29 507
-
浅谈项目内部成本控制2010-01-23 855
-
简状电炉内部恒温控制电路2009-02-18 4205
-
TFT内部控制芯片R61505U_1.02015-11-23 822
-
KUKA机器人KRC4操作说明书2015-12-23 2415
-
SMART如何与V90伺服实现内部位置控制2018-12-17 14424
-
KUKA KRC5微型小型机器人控制器介绍2020-08-10 6272
-
DAQmx内部引脚的连接控制2021-09-30 741
-
KUKA用KRC浏览器在线工作2022-08-15 2363
-
特定于员工的基于硬件的许可可抵御内部安全威胁2022-10-24 1345
-
汽车电子的解包域控制器内部解析2022-10-28 785
-
Quest:影响端点安全的内部威胁2023-01-31 1326
-
微控制器内部的存储器有哪些2024-08-22 2589
全部0条评论

快来发表一下你的评论吧 !
