

英伟达Jetson-Stereo-Depth案例解析
嵌入式技术
描述
使用两个摄像头来计算深度图,在没有RGBD的情况下可以使用,不过为了保持效率,需要使用Jetson边缘计算设备。
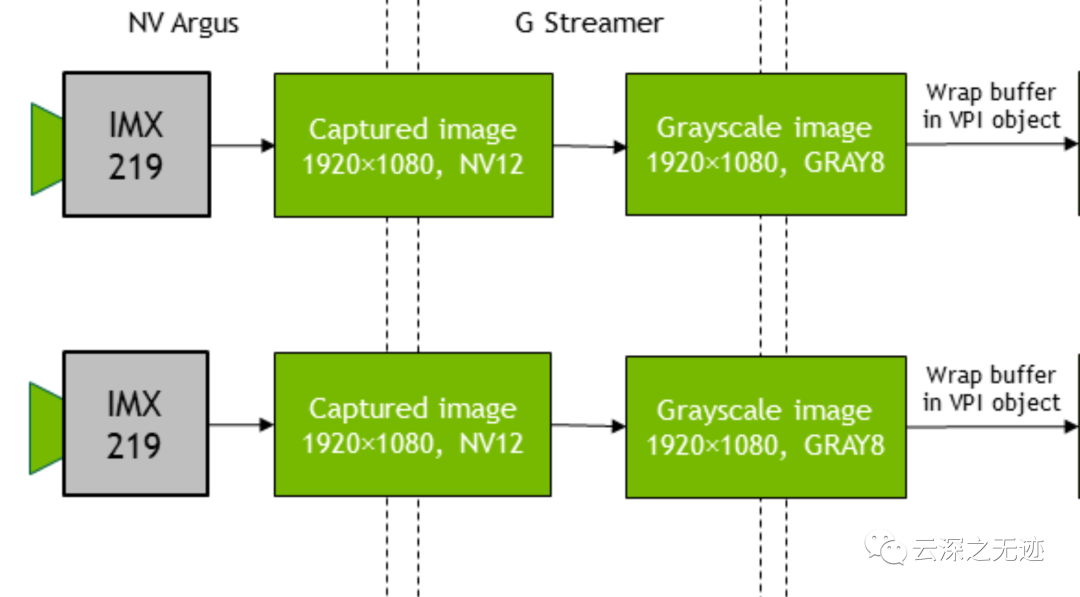
先输入的是两个IMX219的视频流,捕获的视频流是1080P的,接着传为G流这个后处理器,看图是处理了一下颜色空间。
这个VPI我查一下,是英伟达家的视觉编程接口,总之就是进行了一些转换的过程。

大概是这样的
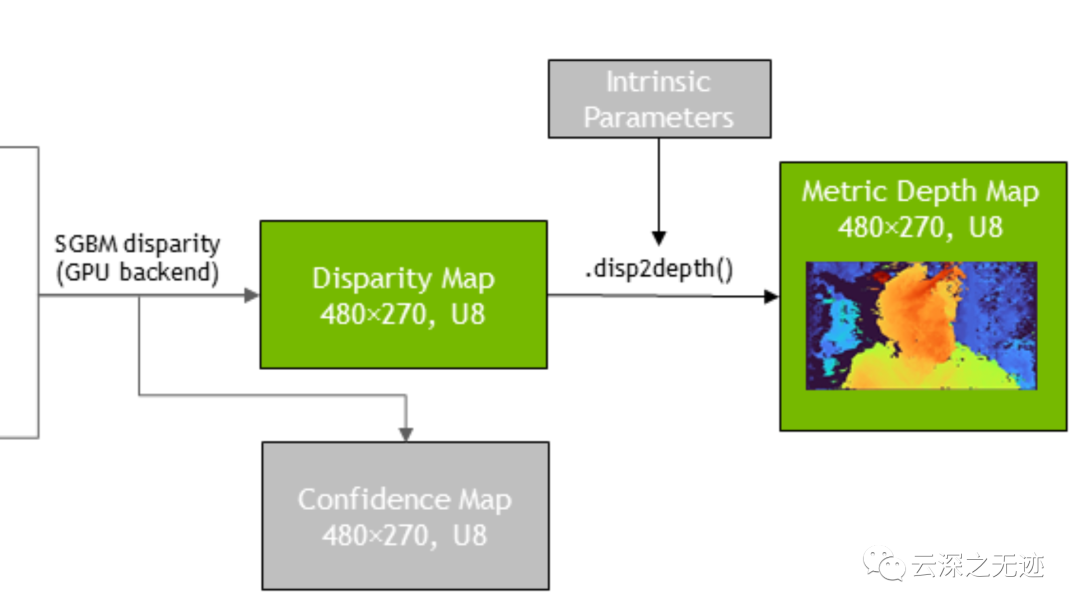
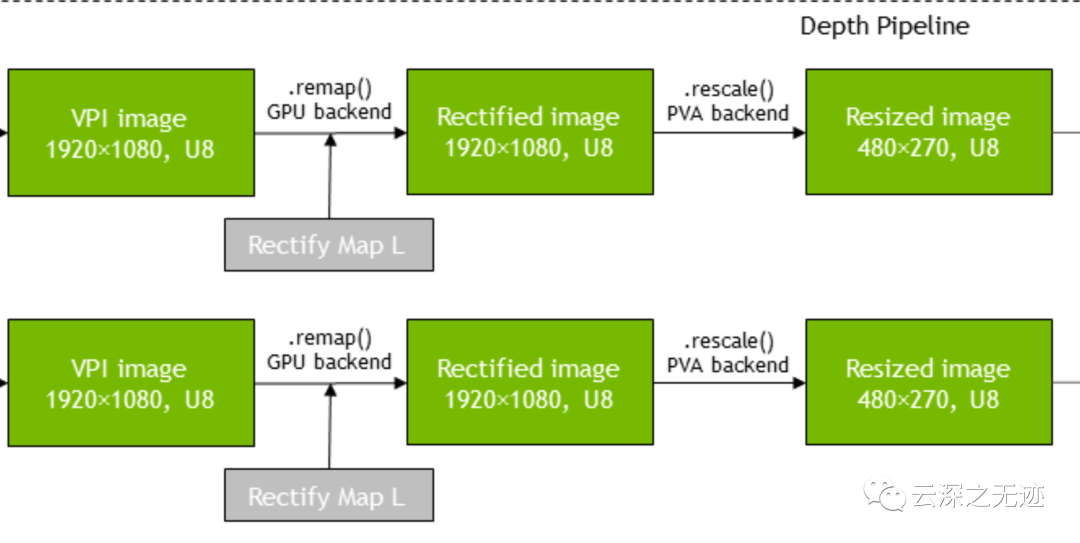
最后进行这个合成运算和对齐
capture->rectify->SGBM->depth calc.
数据流管道

处理流程

IMX219,Sony家的东西
sudo apt install libnvvpi1 python3-vpi1 vpi1-dev
需要安装的库
https://repo.download.nvidia.com/jetson/
但是这个源码我找不到了,就是找到了deb的库。

英伟达的库好全啊

当然了,算法很全面
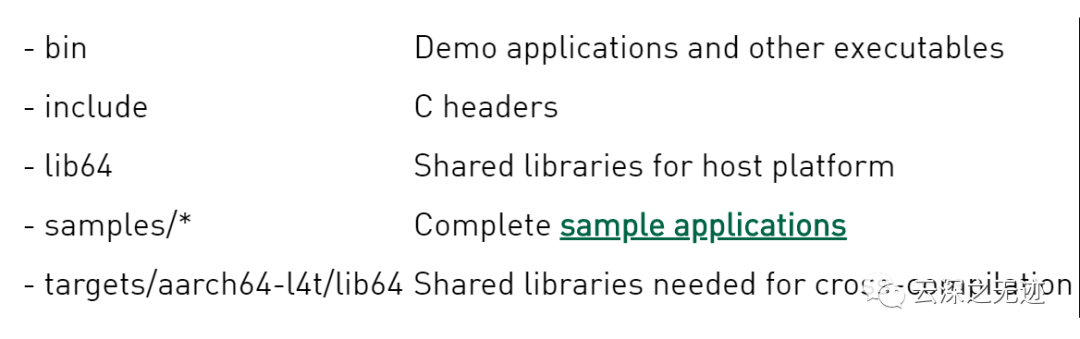
安装后里面有的内容
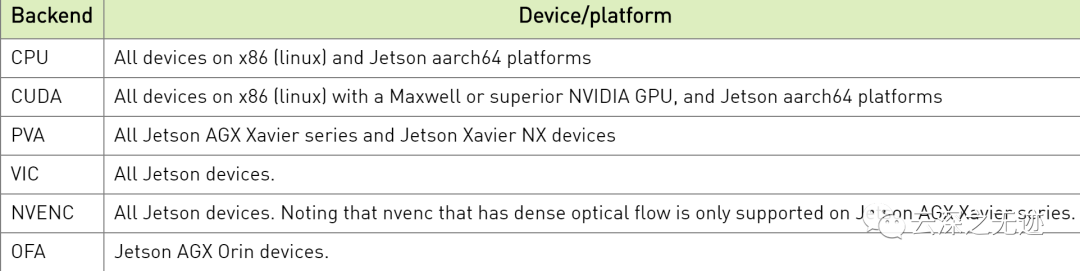
可以处理的视频流后端,这里是支持jetson的(废话)
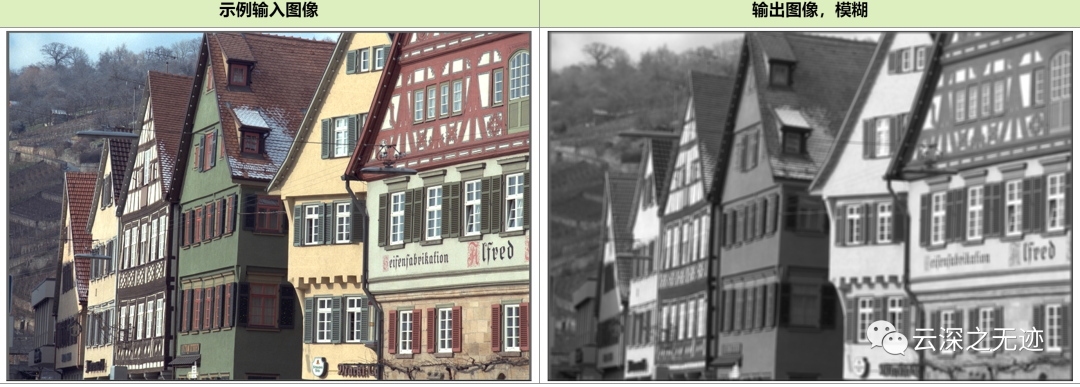
后端使用CUDA的结果
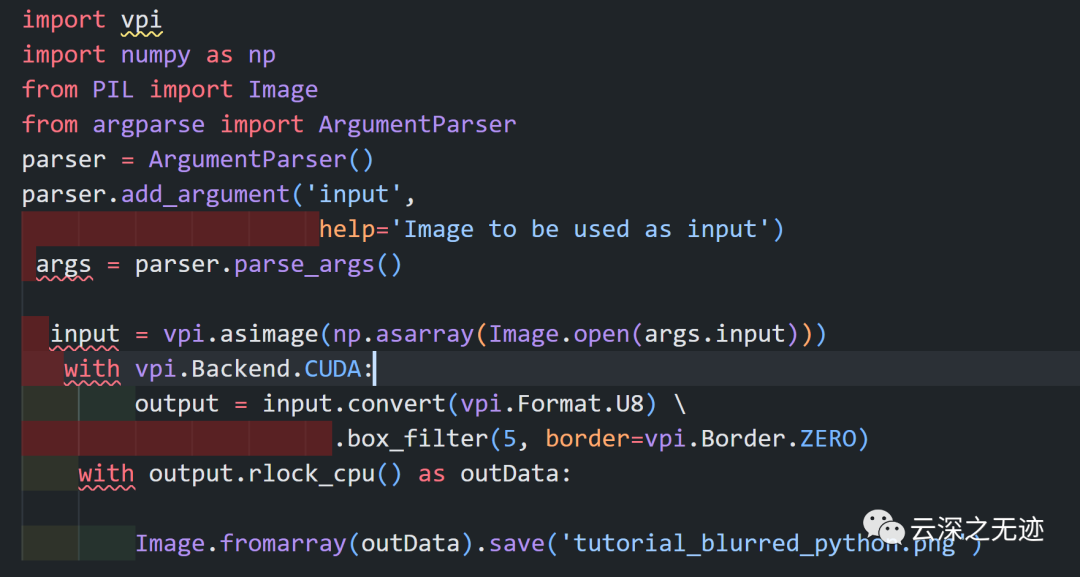
写一个,Python是快,但是不能进行内存管理,CSDK可以。U8是八位无符号数。
#include#include #if CV_MAJOR_VERSION >= 3#include #else#include #endif#include #include #include #include #include #include int main(int argc, char *argv[]){ if (argc != 2) { std::cerr << "Must pass an input image to be blurred" << std::endl; return 1; } cv::Mat cvImage = cv::imread(argv[1]); if (cvImage.data == NULL) { std::cerr << "Can't open input image" << std::endl; return 2; } VPIStream stream; vpiStreamCreate(0, &stream); VPIImage image; vpiImageCreateWrapperOpenCVMat(cvImage, 0, &image); VPIImage imageGray; vpiImageCreate(cvImage.cols, cvImage.rows, VPI_IMAGE_FORMAT_U8, 0, &imageGray); VPIImage blurred; vpiImageCreate(cvImage.cols, cvImage.rows, VPI_IMAGE_FORMAT_U8, 0, &blurred); vpiSubmitConvertImageFormat(stream, VPI_BACKEND_CUDA, image, imageGray, NULL); vpiStreamSync(stream); VPIImageData outData; vpiImageLockData(blurred, VPI_LOCK_READ, VPI_IMAGE_BUFFER_HOST_PITCH_LINEAR, &outData); cv::Mat cvOut; vpiImageDataExportOpenCVMat(outData, &cvOut); imwrite("tutorial_blurred.png", cvOut); vpiImageUnlock(blurred); vpiStreamDestroy(stream); vpiImageDestroy(image); vpiImageDestroy(imageGray); vpiImageDestroy(blurred); return 0;}
CPP的版本,还需要Cmake编译

主要是为了加速运行视觉的算法
算法:表示不可分割的计算操作。
后端:代表负责实际计算的硬件引擎。
Streams:充当提交算法的异步队列,最终在给定后端按顺序执行。流和事件是计算管道的构建块。
缓冲区:存储输入和输出数据。
事件:提供在流和/或应用程序线程上操作的同步原语。
上下文:保存 VPI 和创建对象的状态。
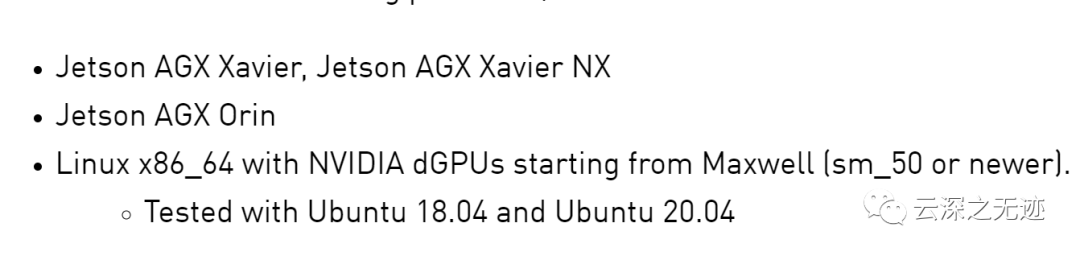
可以运行的硬件

补一个硬件的淘汰路线
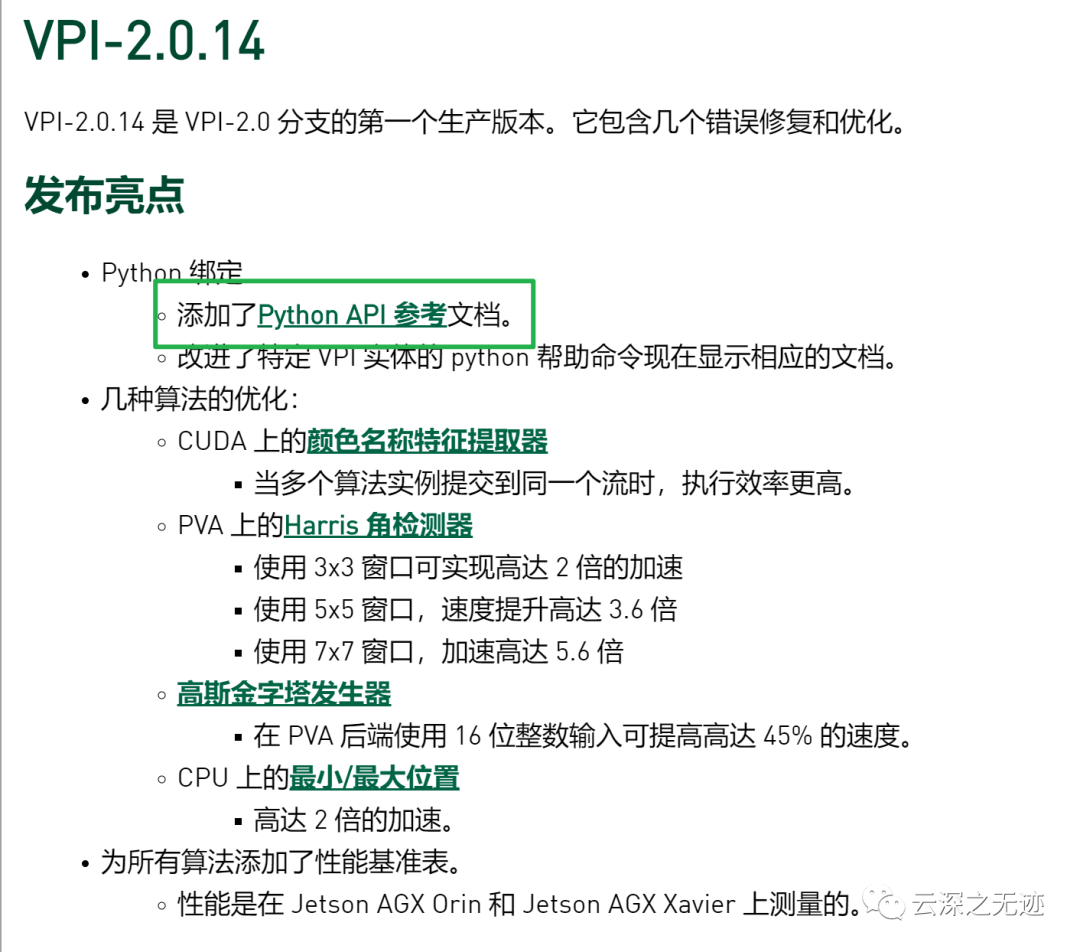
最近一个版本是有了Python的支持

真新啊
这个项目一开始需要的是进行摄像头的标定。
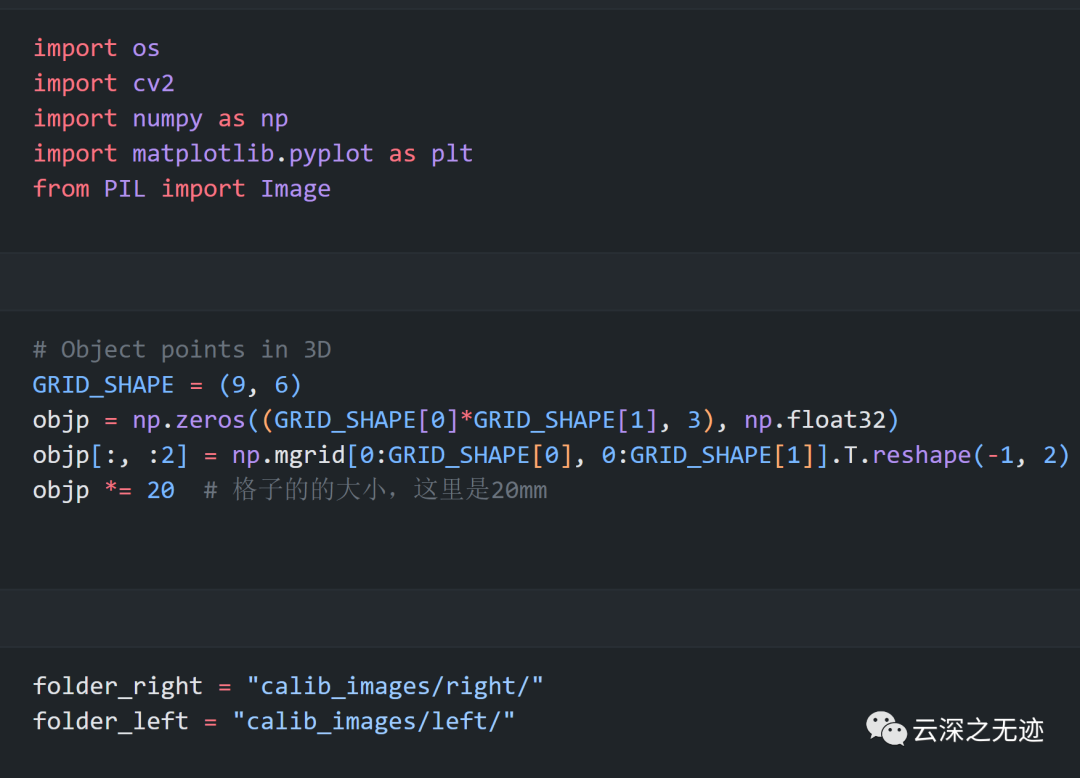
导入的库
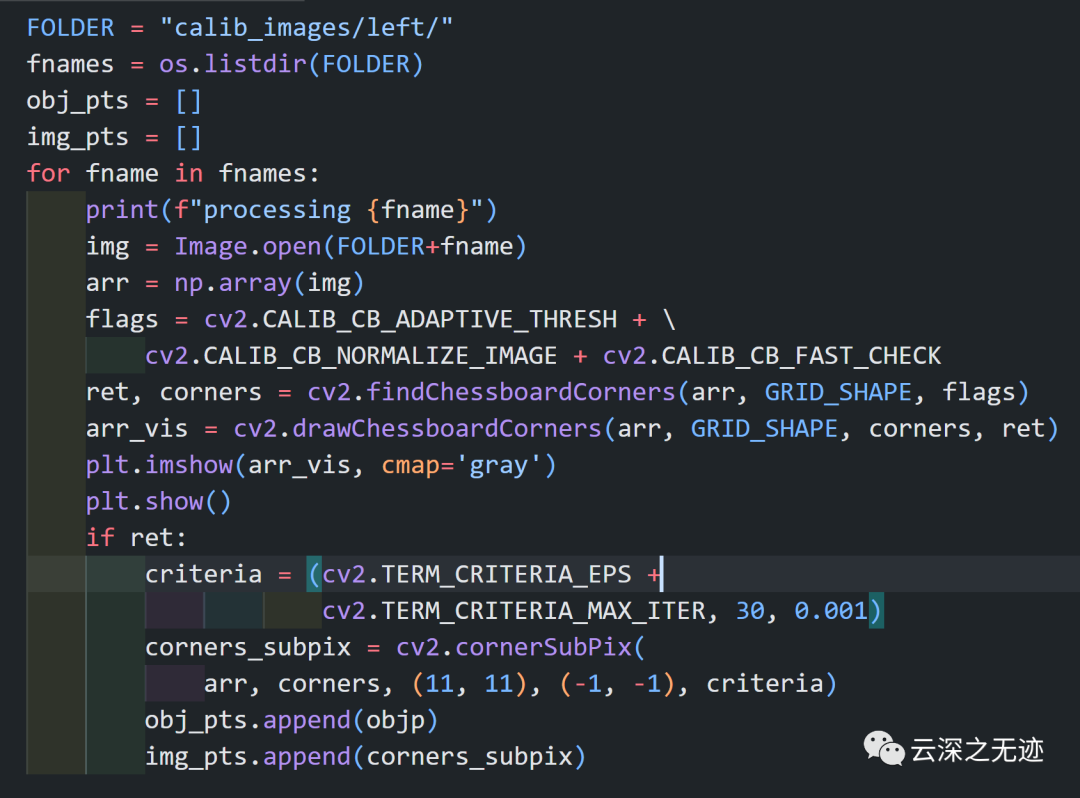
将棋盘格引入
wget https://www.dropbox.com/sh/j4w6tg9b0ov209g/AAA1HfT7Yy33tmGI1tWaqDKCa?dl=1 -O /tmp/calib_files.zipunzip /tmp/calib_files.zip
需要提前执行一下
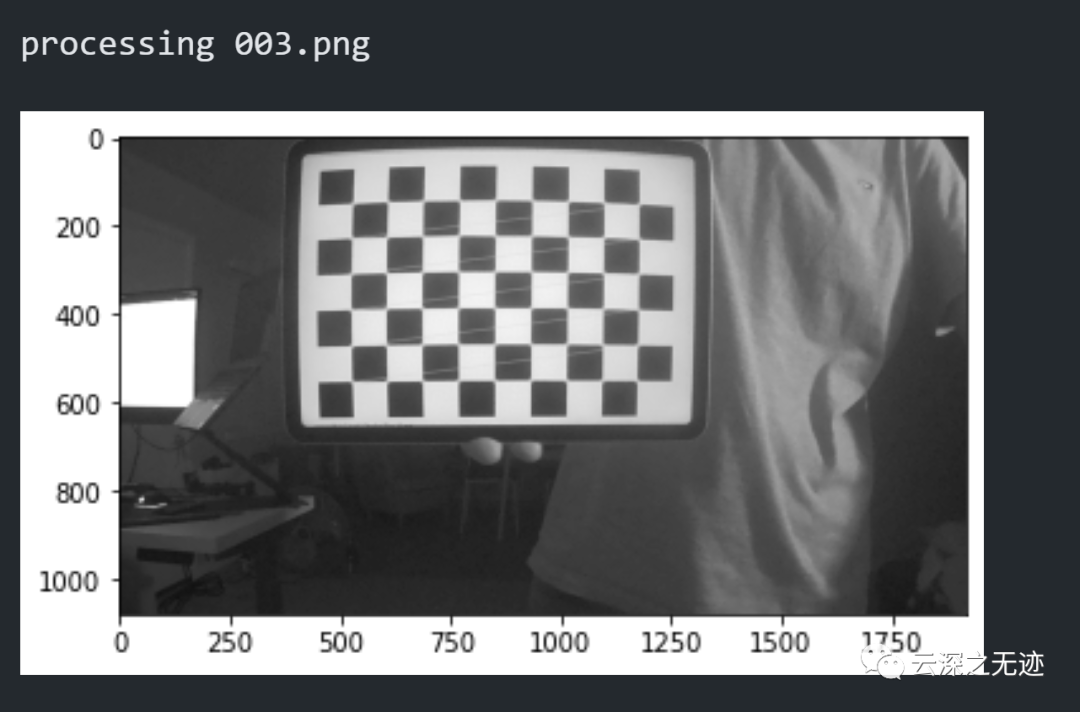
接着开始处理
ret, K_l, dist_coeff_l, rvecs, tvecs = cv2.calibrateCamera(obj_pts, img_pts, (arr.shape[1], arr.shape[0]), None,None)
得到校准的参数

参数到手
img = Image.open(FOLDER+"001.png")arr = np.array(img) arr_corr = cv2.undistort(arr, K_l, dist_coeff_l, None, K_l) fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(20,10))ax1.imshow(arr, cmap='gray')ax2.imshow(arr_corr, cmap='gray')plt.show()
因为是鱼眼的相机,这里使用标定的参数进行校正。
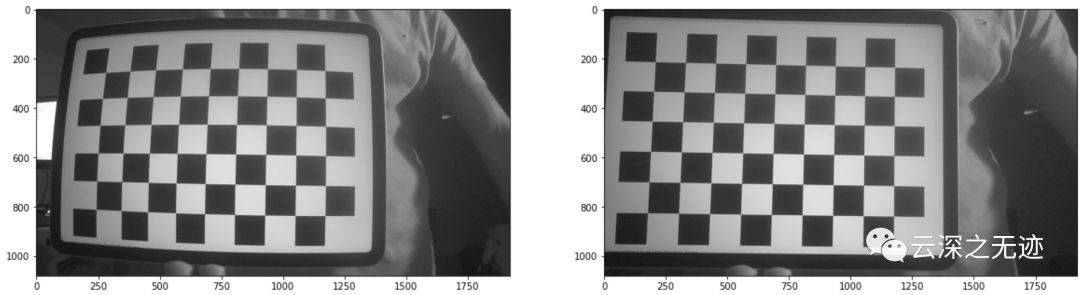
就是这样
因为是两个相机,记得标定两次,然后保存参数:
np.save("K_l.npy", K_l)np.save("K_r.npy", K_r)
np.save("dist_coeff_l.npy", dist_coeff_l)np.save("dist_coeff_r.npy", dist_coeff_r)
重新开个Jupyter,导入库,生成一张新图,把相机的照片准备好

建立一些列表来存放我们的数据,使用ZIP来进行遍历,处理角点

现在就只相当于左右两个棋盘图像对齐操作
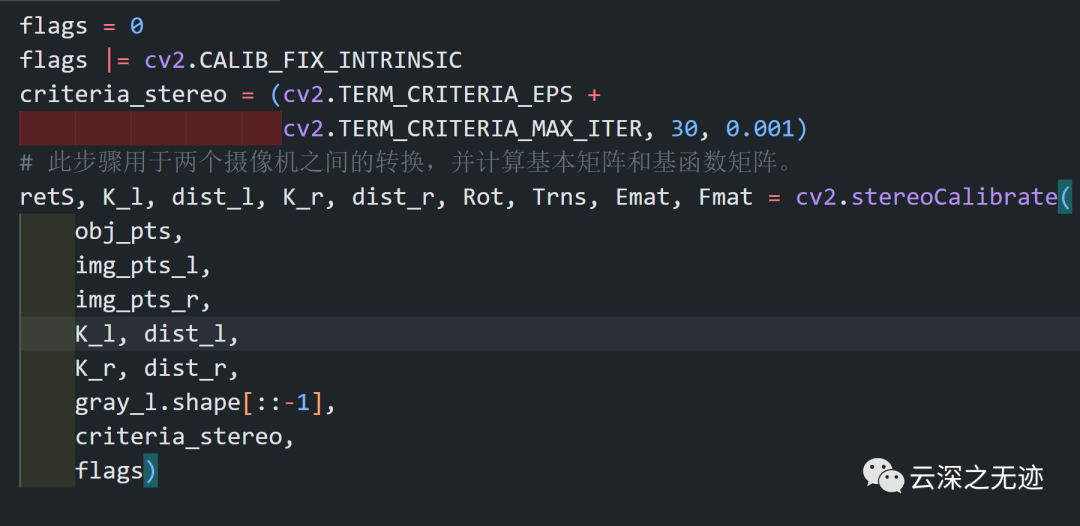
将摄像头对齐
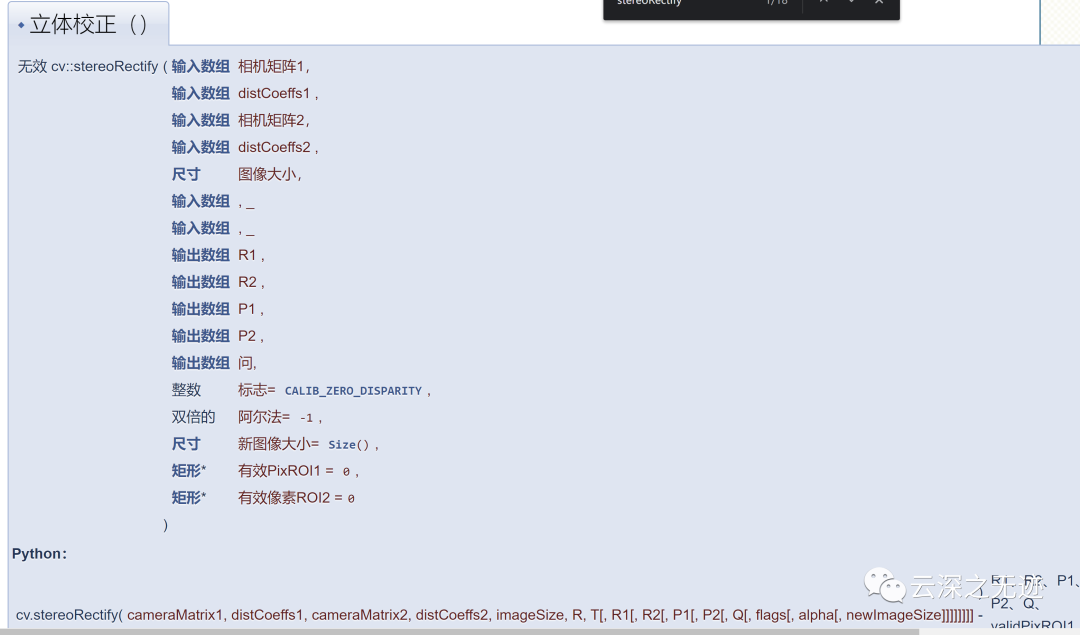
使用立体校正
rect_l, rect_r, proj_mat_l, proj_mat_r, Q, roiL, roiR = cv2.stereoRectify(K_l, dist_l, K_r, dist_r, gray_l.shape[::-1], Rot, Trns, 1 ,(0,0))
left_stereo_maps = cv2.initUndistortRectifyMap(K_l, dist_l, rect_l, proj_mat_l,
gray_l.shape[::-1], cv2.CV_16SC2)right_stereo_maps = cv2.initUndistortRectifyMap(K_r, dist_r, rect_r, proj_mat_r,
gray_l.shape[::-1], cv2.CV_16SC2)
初始化每个校正过的视图
arr_l_rect = cv2.remap(arr_l, left_stereo_maps[0],left_stereo_maps[1], cv2.INTER_LANCZOS4, cv2.BORDER_CONSTANT, 0)arr_r_rect = cv2.remap(arr_r, right_stereo_maps[0],right_stereo_maps[1], cv2.INTER_LANCZOS4, cv2.BORDER_CONSTANT, 0)
将函数进行进行映射

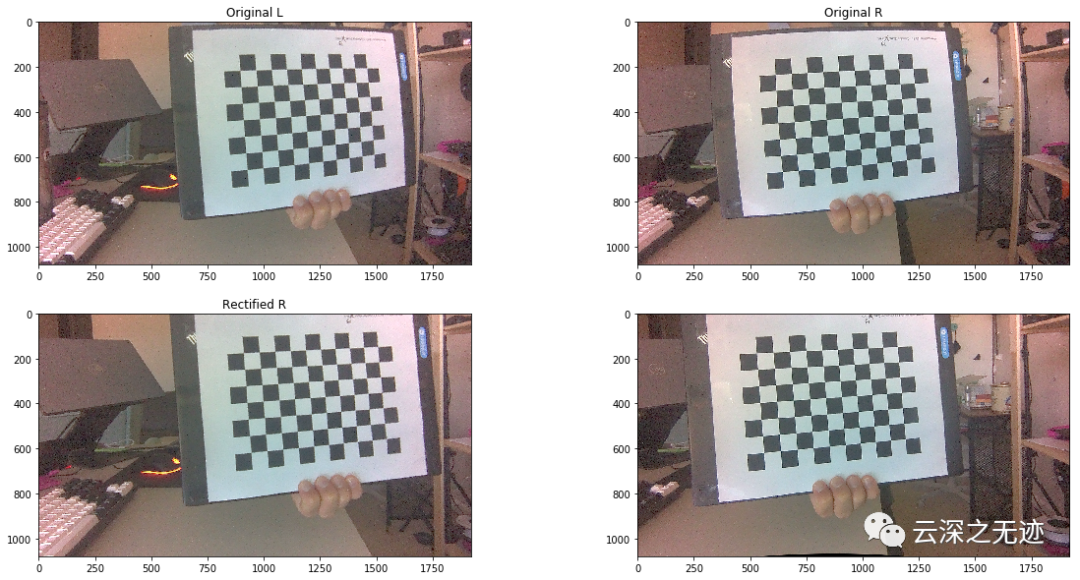
开始进行校正
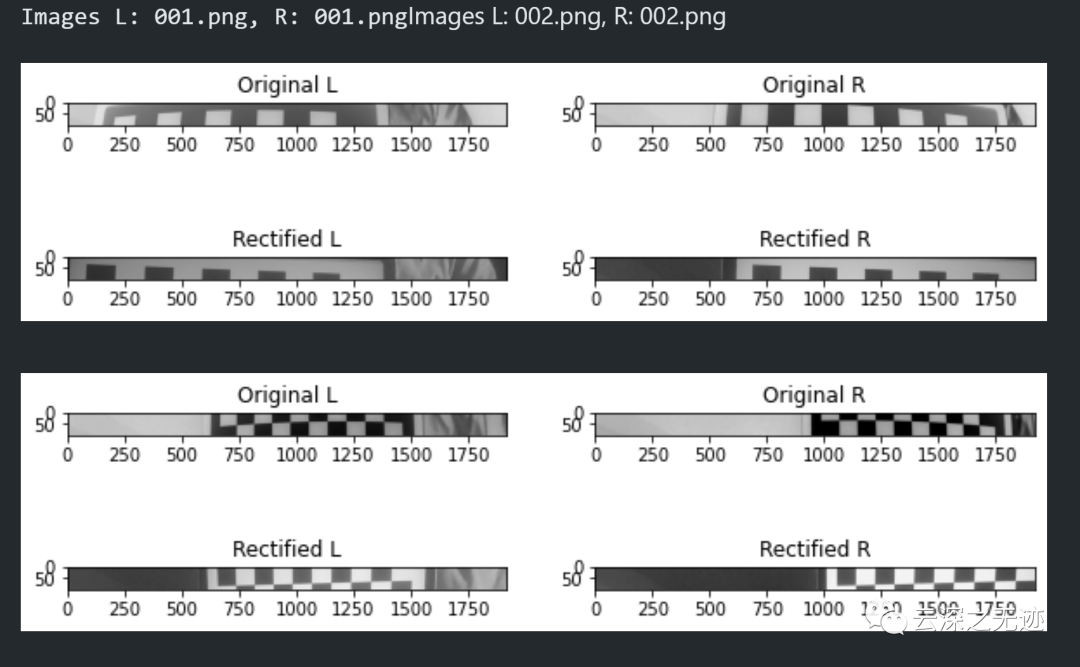
看一张就行

效果不错的情况下都安排了
读取所有的图像

对单个图像校准
fig, axs = plt.subplots(2, 2, figsize=(20,10))
# beforeaxs[0][0].title.set_text('Original L')axs[0][0].imshow(arr_l)
axs[0][1].title.set_text('Original R')axs[0][1].imshow(arr_r)
axs[1][0].title.set_text('Rectified L')axs[1][0].imshow(arr_l_rect)axs[1][0].title.set_text('Rectified R')axs[1][1].imshow(arr_r_rect)
结果

开始融合
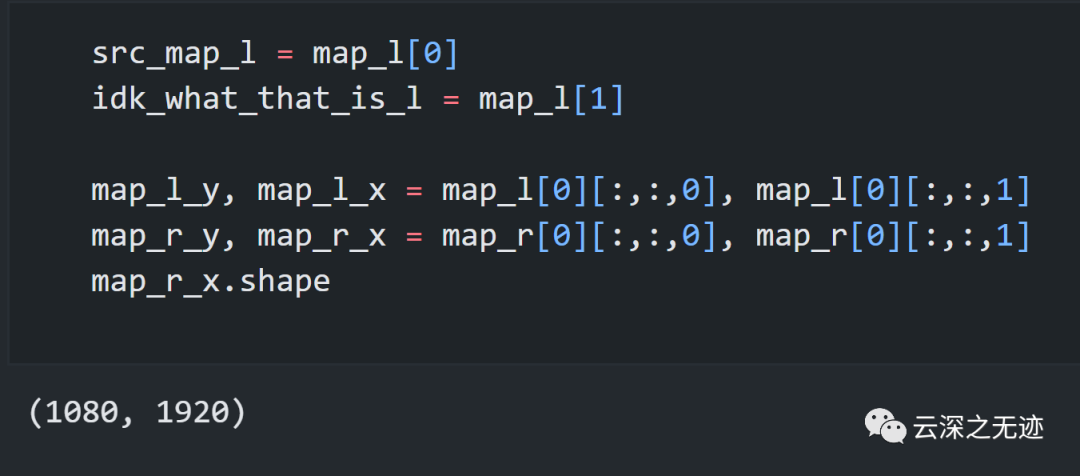
可以先看下数组形状



X和Y的
组合一下
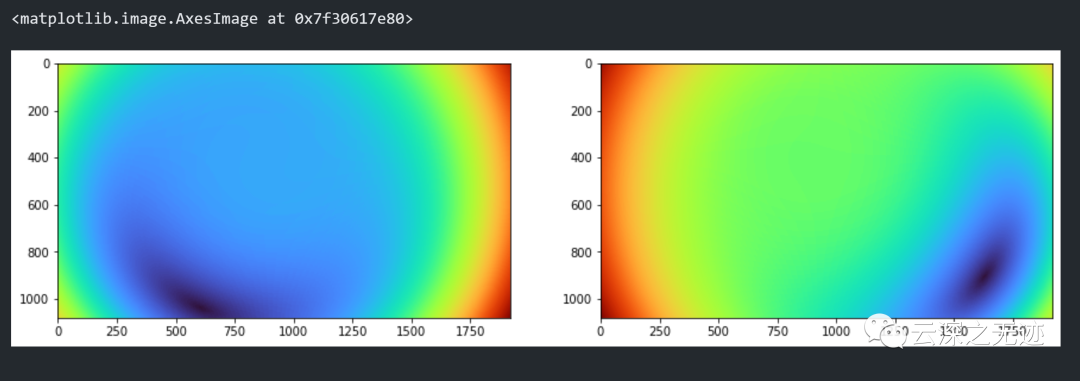
最终的结果
import timeimport queueimport numpy as npimport cv2from threading import Threadfrom camera import Camerafrom concurrent.futures import ThreadPoolExecutor
MAX_DISP = 128WINDOW_SIZE = 10
class Depth(Thread): def __init__(self):
super().__init__() print("Reading camera calibration...")
self._map_l, self._map_r = get_calibration()
self._cam_r = CameraThread(0)
self._cam_l = CameraThread(1)
self._disp_arr = None self._should_run = True
self._dq = queue.deque(maxlen=3)
self._executor = ThreadPoolExecutor(max_workers=4)
self.start()
# Wait for the deque to start filling up while len(self._dq) < 1: time.sleep(0.1)
def stop(self): self._should_run = False self._cam_l.stop() self._cam_r.stop()
def disparity(self): while len(self._dq) == 0: time.sleep(0.01) return self._dq.pop()
def enqueue_async(self, vpi_image): arr = vpi_image.cpu().copy() self._dq.append(arr) del vpi_image
def run(self): import vpi # Don't import vpi in main thread to avoid creating a global context
i = 0 self._warp_l = make_vpi_warpmap(self._map_l) self._warp_r = make_vpi_warpmap(self._map_r) ts_history = []
while self._should_run: i += 1 ts = [] ts.append(time.perf_counter())
with vpi.Backend.CUDA: ts.append(time.perf_counter()) # confidenceMap = vpi.Image(vpi_l.size, vpi.Format.U16)
# Read Images arr_l = self._cam_l.image arr_r = self._cam_r.image ts.append(time.perf_counter())
# Convert to VPI image vpi_l = vpi.asimage(arr_l) vpi_r = vpi.asimage(arr_r) ts.append(time.perf_counter())
# Rectify vpi_l = vpi_l.remap(self._warp_l) vpi_r = vpi_r.remap(self._warp_r) ts.append(time.perf_counter())
# Resize vpi_l = vpi_l.rescale( (480, 270), interp=vpi.Interp.LINEAR, border=vpi.Border.ZERO ) vpi_r = vpi_r.rescale(
(480, 270), interp=vpi.Interp.LINEAR, border=vpi.Border.ZERO ) ts.append(time.perf_counter())
# Convert to 16bpp vpi_l_16bpp = vpi_l.convert(vpi.Format.U16, scale=1) vpi_r_16bpp = vpi_r.convert(vpi.Format.U16, scale=1) ts.append(time.perf_counter())
# Disparity disparity_16bpp = vpi.stereodisp( vpi_l_16bpp, vpi_r_16bpp, out_confmap=None, backend=vpi.Backend.CUDA,
window=WINDOW_SIZE, maxdisp=MAX_DISP, ) ts.append(time.perf_counter())
# Convert again disparity_8bpp = disparity_16bpp.convert( vpi.Format.U8, scale=255.0 / (32 * MAX_DISP) ) ts.append(time.perf_counter())
# CPU mapping # self._disp_arr = disparity_8bpp self._executor.submit(self.enqueue_async, disparity_8bpp) # global frames # frames.append(self._disp_arr)
ts.append(time.perf_counter())
# Render # cv2.imshow("Disparity", disp_arr) # cv2.waitKey(1) ts.append(time.perf_counter())
ts = np.array(ts) ts_deltas = np.diff(ts)
ts_history.append(ts_deltas)
debug_str = f"Iter {i}
"
tasks = [
"Enter context",
"Read images",
"Convert to VPI image", "Rectify",
"Resize 1080p->270p", "Convert to 16bpp",
"Disparity", "Convert 16bpp->8bpp",
".cpu() mapping", "OpenCV colormap",
"Render", ]
debug_str += f"Sum: {sum(ts_deltas):0.2f}
" task_acc_time = 1000 * np.array(ts_history).mean(axis=0)
for task, dt in zip(tasks, task_acc_time):
debug_str += f"{task.ljust(20)} {dt:0.2f}
"
# print(debug_str)
if i % 10 == 0:
vpi.clear_cache()
def disp2depth(disp_arr): F, B, PIXEL_SIZE = (CAM_PARAMS.F, CAM_PARAMS.B, CAM_PARAMS.PIXEL_SIZE)
disp_arr[disp_arr < 10] = 10 disp_arr_mm = disp_arr * PIXEL_SIZE # convert disparites from px -> mm
depth_arr_mm = F * B / (disp_arr_mm + 1e-10) # calculate depth return depth_arr_mm
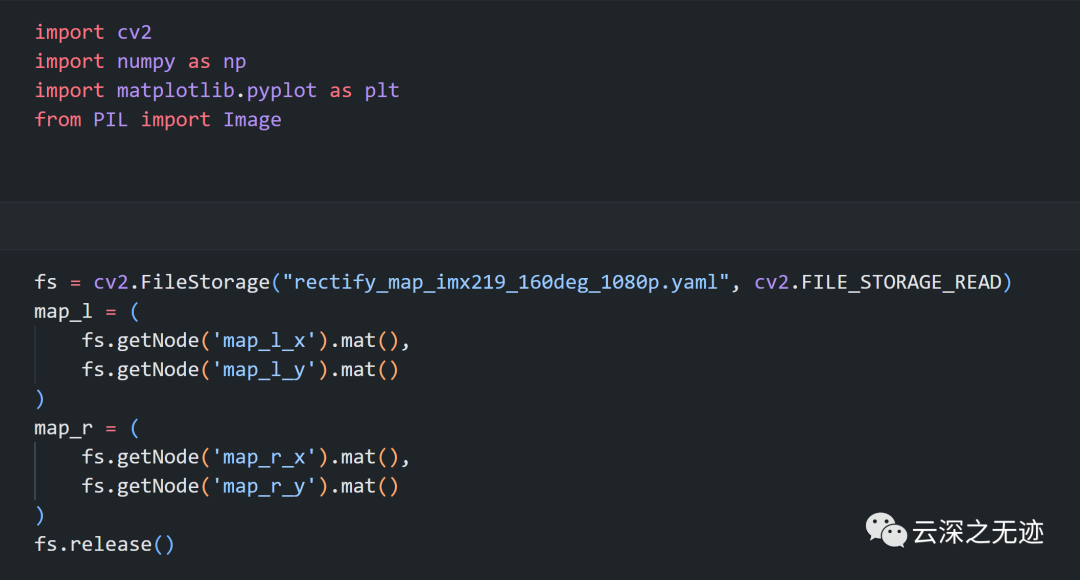
def get_calibration() -> tuple:
fs = cv2.FileStorage( "calib/rectify_map_imx219_160deg_1080p.yaml", cv2.FILE_STORAGE_READ
) map_l = (fs.getNode("map_l_x").mat(), fs.getNode("map_l_y").mat()) map_r = (fs.getNode("map_r_x").mat(), fs.getNode("map_r_y").mat()) fs.release()
return map_l, map_r
def make_vpi_warpmap(cv_maps): import vpi
src_map = cv_maps[0] idk_what_that_is = cv_maps[1] map_y, map_x = src_map[:, :, 0], src_map[:, :, 1]
warp = vpi.WarpMap(vpi.WarpGrid((1920, 1080))) # (H, W, C) -> (C,H,W) arr_warp = np.asarray(warp) wx = arr_warp[:, :, 0] wy = arr_warp[:, :, 1]
wy[:1080, :] = map_x wx[:1080, :] = map_y
return warp
class CameraThread(Thread): def __init__(self, sensor_id) -> None:
super().__init__() self._camera = Camera(sensor_id) self._should_run = True self._image = self._camera.read() self.start()
def run(self): while self._should_run: self._image = self._camera.read()
@property def image(self): # NOTE: if we care about atomicity of reads, we can add a lock here return self._image
def stop(self): self._should_run = False self._camera.stop()
def calculate_depth(disp_arr): F, B, PIXEL_SIZE = (CAM_PARAMS.F, CAM_PARAMS.B, CAM_PARAMS.PIXEL_SIZE) disp_arr_mm = disp_arr * PIXEL_SIZE # disparites in mm
depth_arr_mm = F * B / (disp_arr_mm + 1e-1) # distances return depth_arr_mm
if __name__ == "__main__":
DISPLAY = True SAVE = True frames_d = [] frames_rgb = []
depth = Depth() t1 = time.perf_counter()
for i in range(100): disp_arr = depth.disparity() frames_d.append(disp_arr) frames_rgb.append(depth._cam_l.image)
print(i) # print(disp_arr) # depth_arr = calculate_depth(disp_arr) # print(f"{i}/20: {disp_arr:0.2f}")
# time.sleep(1)
if DISPLAY: disp_arr = cv2.applyColorMap(disp_arr, cv2.COLORMAP_TURBO)
cv2.imshow("Depth", disp_arr)
cv2.imshow("Image", cv2.resize(depth._cam_l.image, (480, 270))) cv2.waitKey(1)
depth.stop() t2 = time.perf_counter() print(f"Approx framerate: {len(frames_d)/(t2-t1)} FPS")
# Save frames for i, (disp_arr, rgb_arr) in enumerate(zip(frames_d, frames_rgb)): print(f"{i}/{len(frames_d)}", end="
") disp_arr = cv2.applyColorMap(disp_arr, cv2.COLORMAP_TURBO) cv2.imwrite(f"images/depth_{i}.jpg", disp_arr) cv2.imwrite(f"images/rgb_{i}.jpg", rgb_arr)
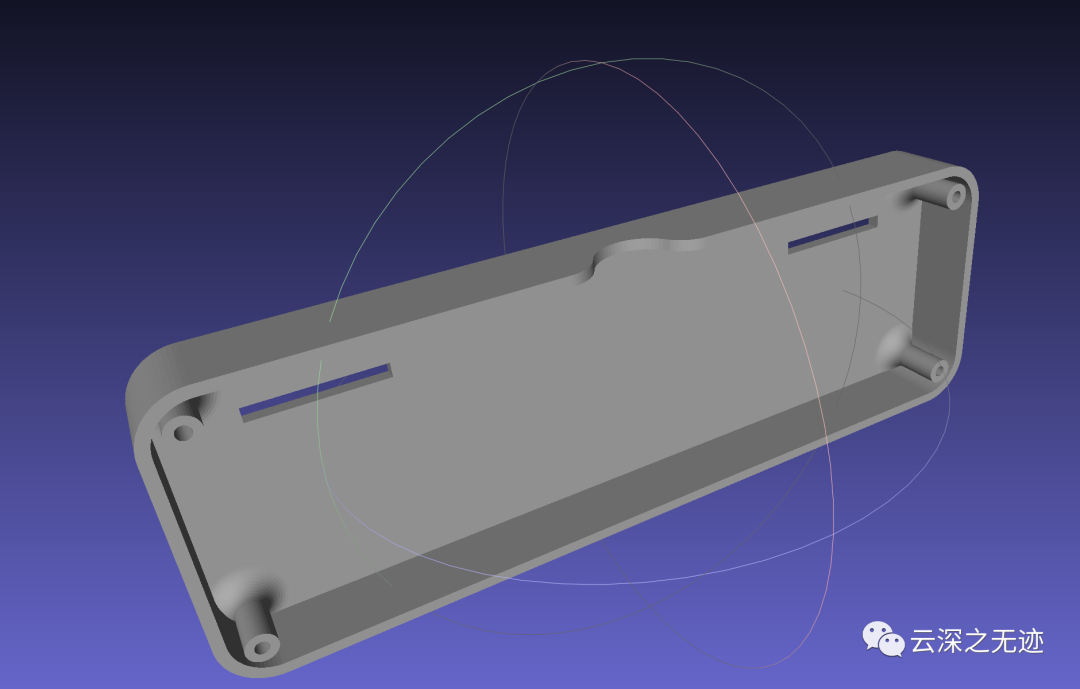
写了这么多了,不写了,给个demo。

给出相机的打印件
后面

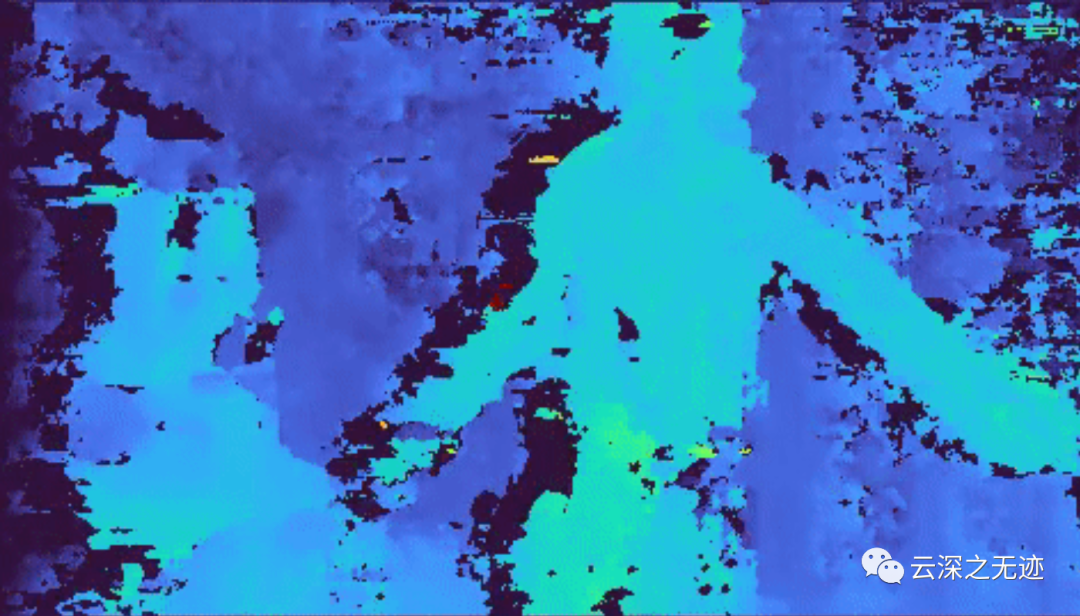


由远及近
编辑:黄飞
-
00032 Jetson TX2 NX开发者套件!TX2的性能,NANO的尺寸! #英伟达 #jetson学习电子知识 2023-07-02
-
瑞芯微和英伟达的边缘计算盒子方案,你会选哪一家的?2022-09-29 2889
-
移远通信5G通信模组与英伟达Jetson AGX Orin平台完成联调2022-05-24 3115
-
英伟达DPU的过“芯”之处2022-03-29 5938
-
Jetson Nano是什么?有何作用2022-01-12 1734
-
寒武纪发布边缘AI芯片思元220,性能超过英伟达2019-12-18 8278
-
英伟达推出最新嵌入式计算机Jetson Nano2019-09-18 4200
-
英伟达嵌入式计算平台让神经网络走进终端设备2019-08-12 1123
-
英伟达推出人工智能小电脑Jetson Nano,为机器人提供大脑2019-03-20 6098
-
英伟达发布全新AI芯片Jetson AGX Xavier 专为机器人设计2018-12-24 3010
-
英伟达发布全新AI芯片Jetson Xavier2018-06-29 10501
-
英伟达专为物联网产品发布新品:Jetson TX2移动SoC平台2017-03-08 2806
-
NVIDIA 3D视觉技术硬件设计开发:Jetson TX12016-10-31 4350
全部0条评论

快来发表一下你的评论吧 !
