

control suite如何安装
电子说
描述
今天给大家安利一下了。一般同学会去某度上搜,看到各种各样版本的PID示例,或者去GitHub上白嫖。
其实一些芯片公司会提供一些控制领域的解决方案了,这里面就会包括PID库。
比如ST的“ST Motor Control Sdk”,或者TI的C2000系列的control suite。
不过目前TI官方对于control suite已经不再提供相应的更新,可以继续下载这个套件。
目前control suite已经更新为C2000WARE-MOTORCONTROL-SDK.
那本文主要介绍TI的control suite,这里面除了PID外有很多控制类算法,并且配置了丰富的文档。
如何安装?
进入ti的官网,输入control suite进行搜索,就可以找到相应的安装包。
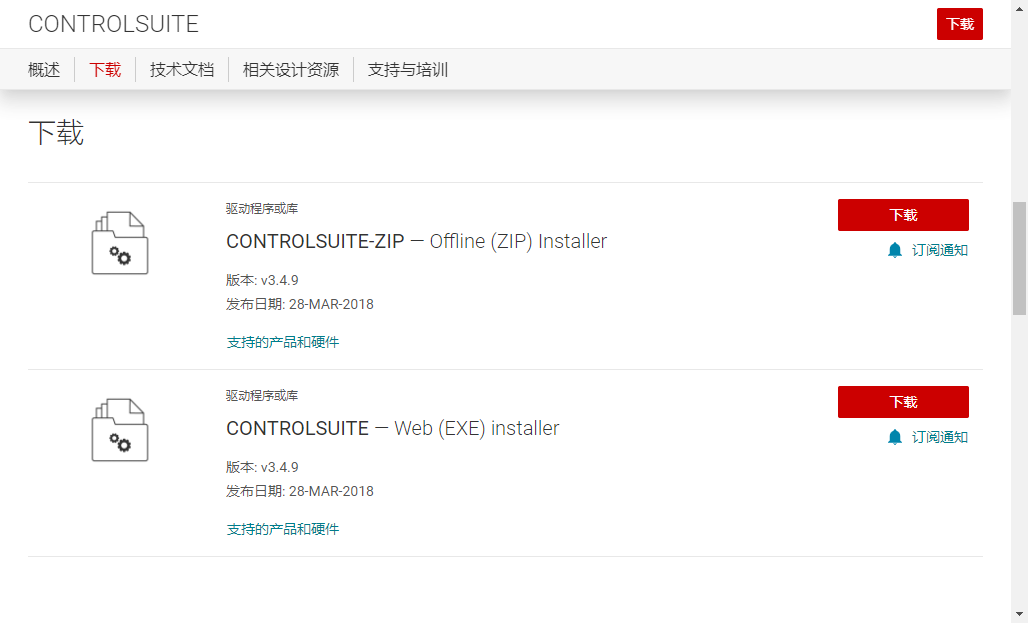
这里有离线安装包,和在线安装包。直接基于在线安装包进行操作即可。我们先下载安装包。

下面就是一路疯狂点击Next即可;
 界面 1
界面 1 界面 2
界面 2 界面 3
界面 3 界面 4
界面 4 耐心等待
耐心等待 安装成功
安装成功
源码和文档
进入主界面,这里基本的例子都是基于TI的C2000系列的MCU进行开发的,具体如下图所示;
 主界面
主界面
进入主界面之后,我们可以看到左侧这边包含了软硬件文档,项目示例还有相应的文档。

其实我们要找的是基于C2000系列MCU的数学算法库,可以在下列列表中找到;
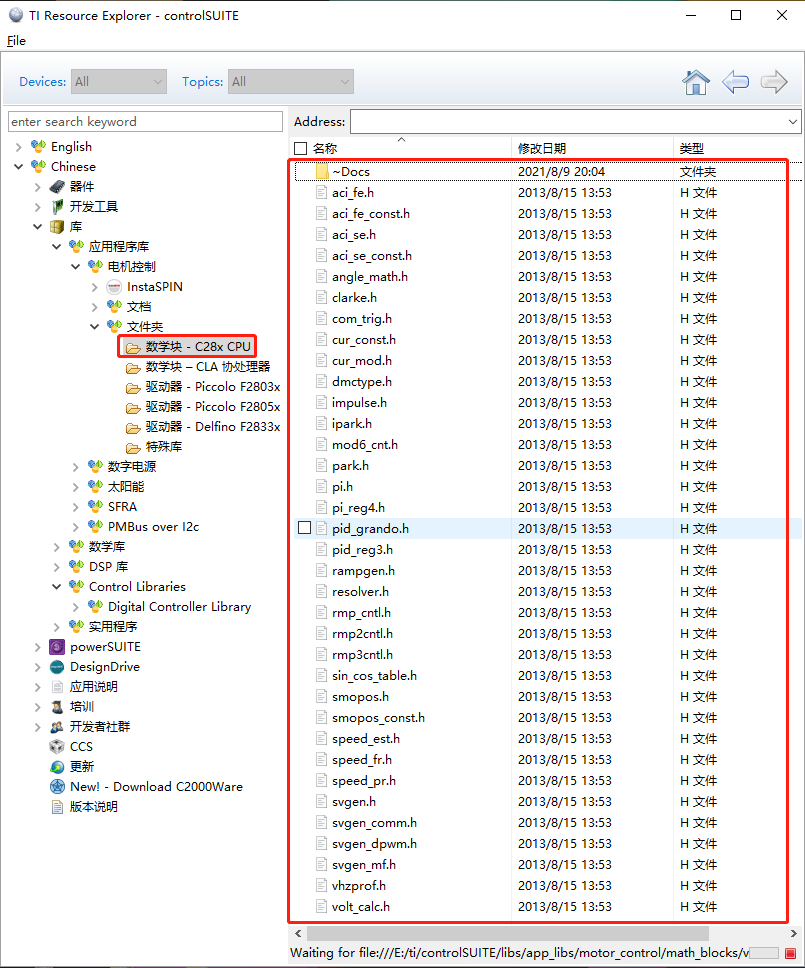
当然也可以在安装目录C: icontrolSUITElibsapp_libsmotor_controlmath_blocksv4.2下面找到相应的PID算法;
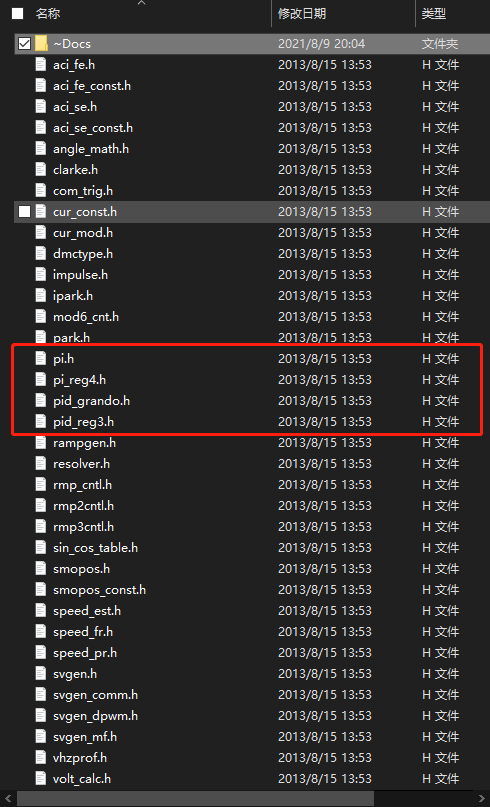
至于如何使用这几个文件,这里也提供了相应的文档,在Docs中找到,
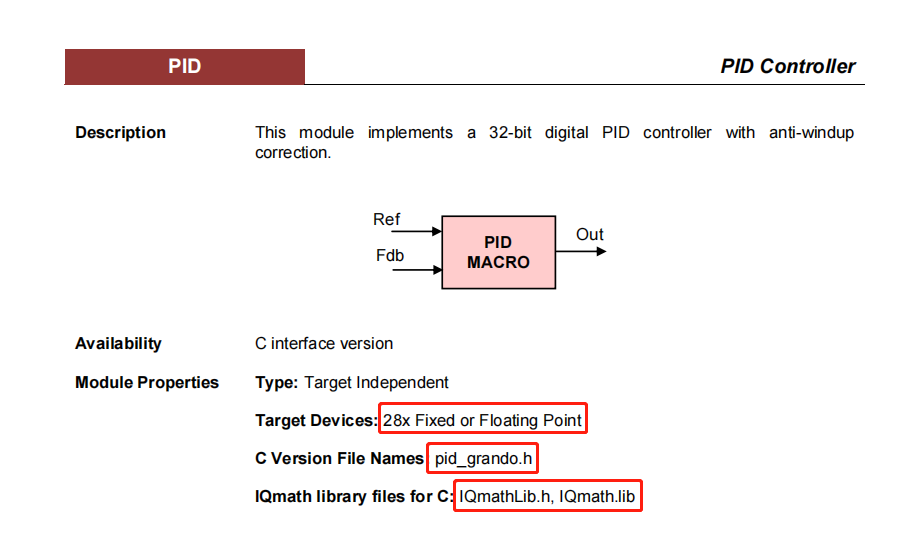
例如pid_grando.h文件,这里介绍了对应的平台,当然是TI系列的MCU,并且依赖于IQMath库,其实这里我们做一些简单的改动,就可以移植到自己所需的平台上去了,具体源码如下:
/* =================================================================================
File name: PID_GRANDO.H
===================================================================================*/#ifndef __PID_H__#define __PID_H__typedef struct { _iq Ref; // Input: reference set-point
_iq Fbk; // Input: feedback
_iq Out; // Output: controller output
_iq c1; // Internal: derivative filter coefficient 1
_iq c2; // Internal: derivative filter coefficient 2
} PID_TERMINALS;
// note: c1 & c2 placed here to keep structure size under 8 wordstypedef struct { _iq Kr; // Parameter: reference set-point weighting
_iq Kp; // Parameter: proportional loop gain
_iq Ki; // Parameter: integral gain
_iq Kd; // Parameter: derivative gain
_iq Km; // Parameter: derivative weighting
_iq Umax; // Parameter: upper saturation limit
_iq Umin; // Parameter: lower saturation limit
} PID_PARAMETERS;
typedef struct { _iq up; // Data: proportional term
_iq ui; // Data: integral term
_iq ud; // Data: derivative term
_iq v1; // Data: pre-saturated controller output
_iq i1; // Data: integrator storage: ui(k-1)
_iq d1; // Data: differentiator storage: ud(k-1)
_iq d2; // Data: differentiator storage: d2(k-1)
_iq w1; // Data: saturation record: [u(k-1) - v(k-1)]
} PID_DATA;
typedef struct { PID_TERMINALS term;
PID_PARAMETERS param;
PID_DATA data;
} PID_CONTROLLER;
/*-----------------------------------------------------------------------------
Default initalisation values for the PID objects
-----------------------------------------------------------------------------*/
#define PID_TERM_DEFAULTS {
0,
0,
0,
0,
0
}#define PID_PARAM_DEFAULTS {
_IQ(1.0),
_IQ(1.0),
_IQ(0.0),
_IQ(0.0),
_IQ(1.0),
_IQ(1.0),
_IQ(-1.0)
}#define PID_DATA_DEFAULTS {
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(1.0)
}/*------------------------------------------------------------------------------
PID Macro Definition
------------------------------------------------------------------------------*/#define PID_MACRO(v)
/* proportional term */
v.data.up = _IQmpy(v.param.Kr, v.term.Ref) - v.term.Fbk;
/* integral term */
v.data.ui = _IQmpy(v.param.Ki, _IQmpy(v.data.w1, (v.term.Ref - v.term.Fbk))) + v.data.i1;
v.data.i1 = v.data.ui;
/* derivative term */
v.data.d2 = _IQmpy(v.param.Kd, _IQmpy(v.term.c1, (_IQmpy(v.term.Ref, v.param.Km) - v.term.Fbk))) - v.data.d2;
v.data.ud = v.data.d2 + v.data.d1;
v.data.d1 = _IQmpy(v.data.ud, v.term.c2);
/* control output */
v.data.v1 = _IQmpy(v.param.Kp, (v.data.up + v.data.ui + v.data.ud));
v.term.Out= _IQsat(v.data.v1, v.param.Umax, v.param.Umin);
v.data.w1 = (v.term.Out == v.data.v1) ? _IQ(1.0) : _IQ(0.0);
#endif // __PID_H__
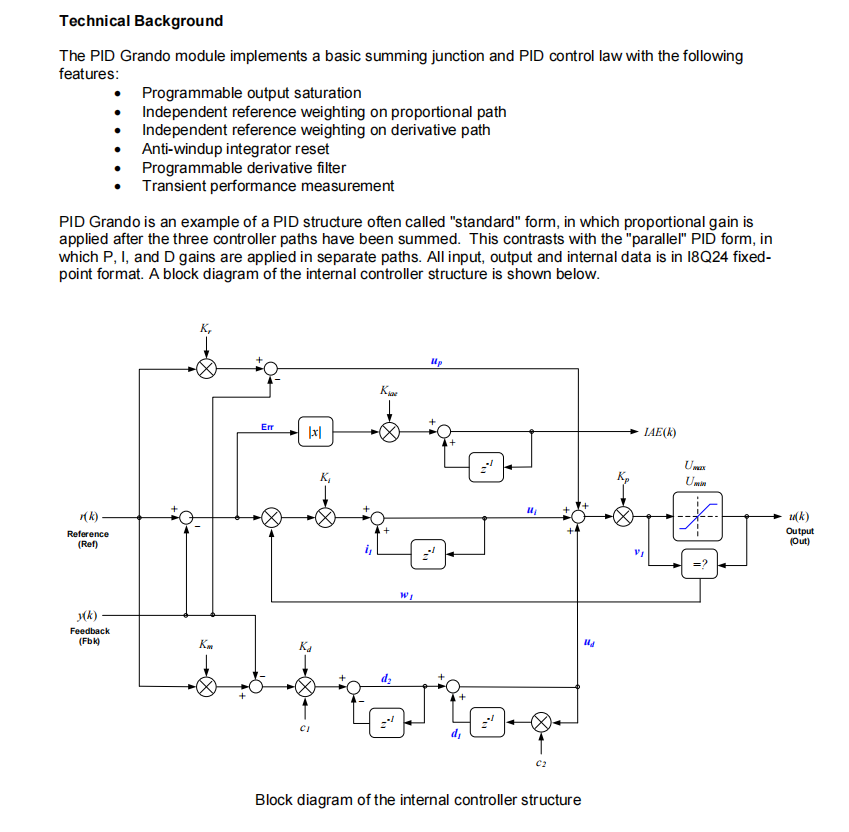
这里面不仅仅做了积分抗饱和,还有对微分环节的滤波处理,所以应用到项目中是没有问题的。
代码中需要了解Q格式的相关的知识,可以参考一下我的这篇文章《一文教你搞懂C语言的Q格式》 ;
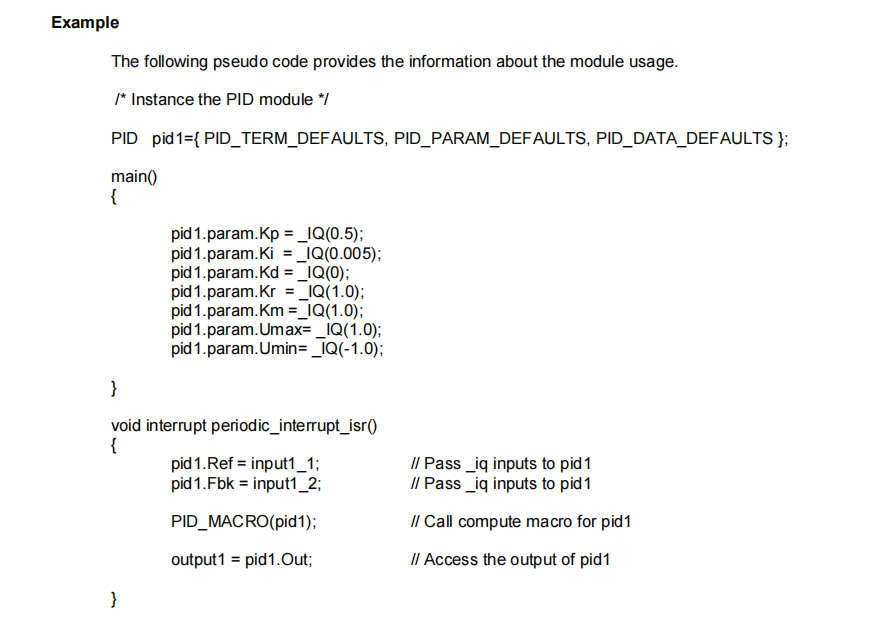
另外,这个路径下的文档中,还提供了相应的Example,以及PID的信号流图,具体如下所示:
所以,整体来说,这个部分的源码以及资料都非常有参考价值,由于离线文件太大,后台回复【618】获取相应安装文件。
原文标题:分享一个直接用于项目开发的PID库!很好用!
文章出处:【微信公众号:硬件攻城狮】欢迎添加关注!文章转载请注明出处。
-
浅谈Pango_Design_Suite工具的安装2024-05-30 4939
-
Vivado Design Suite用户指南:版本说明、安装和许可2023-09-13 726
-
TIA Portal Test Suite Advanced介绍2022-10-10 11035
-
DAC Software Suite Download2021-01-30 889
-
使用Control SUITE 遇到开启白屏问题如何解决2020-07-16 2746
-
请教在Control Suite中哪个链接有BLDC双闭环控制的资料和演示,能否提示一下?2020-06-09 1583
-
请问control suite里面HVMotorCtrl+PfcKit_v2.0 .sch、.pcb文件怎么用Altium Designer 13打开?2020-06-05 2350
-
怎么在没有互联网且没有CD的工作站上安装Xilinx Vivado Design Suite2018-12-19 1841
-
ISE Design suite 10.1安装问题2018-11-26 6535
-
Xilinx ISE Design Suite 11.2无法安装2018-11-21 2836
-
ILT-DataLightII-Software-Suite-安装2017-01-16 957
-
labview官方控件分享UI Control Suite2016-01-23 65375
-
调试Cypress USB用 USB Control Center还是USB Console?2014-08-19 10111
-
AN INTEGRATED MATLAB SUITE FOR2010-02-16 697
全部0条评论

快来发表一下你的评论吧 !
