

制作一个互联网控制的螺栓机器人车
机器人
描述
手上正好有闲置的 Bolt WiFi 模块、机箱和一些电机?这个项目是最适合你的选择。
背景
我们从早上开始工作,日复一日的重复这一项事情,偶尔我们也会需要适当休息和娱乐。一直玩桌上足球并不能满足我们,同时由于游玩过程比较吵闹也会影响别人。因此,为了保持镇静,我们开始思考我们可以做些什么来使我们放松,但仍然会让我们保持在“工作区域”。于是,这个小机器人车就应运而生。
所以最终我们决定制作一个互联网控制的-wait-for-it-RC 机器人,它带有一点点额外的功能。
收集部件
我们到了五金店,里面装满了工具包和组件,让你的眼睛闪烁着贪婪的光芒,我们搜集了我们需要的东西:
Bolt Wifi 模块
基本机器人套件

Arduino UNO 或 Boltduino
L298N电机驱动屏蔽
接近传感器

跳线

电源适配器

连接
我们带着我们需要的所有零件安全地从“硬件森林”回来了。是时候施展我们的魔法组装这个小机器人了。
组装硬件
将脚轮安装在底盘的前中部。
组装机器人汽车底盘,并使用螺母和螺栓以及如图所示提供的车轮连接两个直流电机。
注意:将电线焊接到电机端子上,然后再将其连接到底盘上。
将电机的端子连接到 L298N 电机驱动模块。
注意:将电机的两个端子连接到驱动模块的同一侧。
将驱动模块的 5V 管脚和 GND 管脚分别连接到 Arduino 的 5V 和 GND。
将 Bolt 的 5V、GND、Tx 和 Rx 引脚分别连接到 Arduino 的 5V、GND、Rx 和 Tx 引脚。对于 Boltduino,将 Bolt 单元连接到现有插槽中。
将四个输入端子(IN1、IN2、IN3、IN4)分别连接到引脚 6、7、8 和 9。
将接近传感器的 5V、GND 和 OUT 引脚分别连接到 Arduino 的 5V、GND 和 3 引脚。

将 Bolt 连接到云端
组装硬件后,注册并将 Bolt 单元连接到 Bolt Cloud。
软件
我们需要使用代码让这个机器人栩栩如生,并将其连接到云端。跟随脚步,让您的机器人也能正常工作。
第 1 步:获取代码。
从本文下方获取代码。下载 .zip 文件或将其克隆到您的系统中,只要适配的话。
第 2 步:使用代码。
代码有两部分:
一个名为app的文件夹
在这个文件夹中有两个文件 i. 控制器.html ii. 控制器.js。我们稍后会谈到它们。
然后是一个名为Bolt_Robot_Car.ino的文件中的 Arduino 固件。这将在您的 Arduino 上闪烁/上传。
第 3 步:设置Arduino 。
完成硬件设置并将螺栓连接到云端后,将文件Bolt_Robot_Car.ino中的固件上传到您的 Arduino。
第 4 步:控制器应用程序。
双击controller.html文件,您应该会看到以下网页。
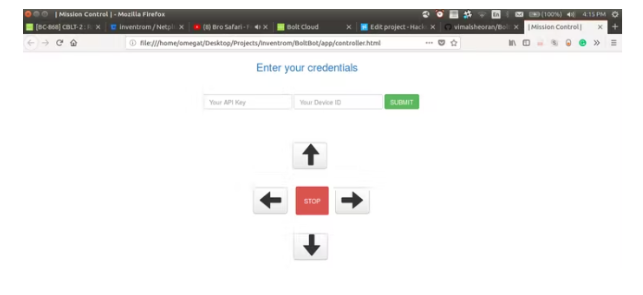
现在在各自的字段中输入您的API 密钥和设备 ID ,然后点击提交。您可以从 Bolt Cloud Dashboard获取API 密钥和设备 ID 。
在此之后,您可以使用控制按钮来控制机器人的运动。按下按钮会触发特定的 JavaScript 函数(检查文件controller.js)以将命令发送到 Bolt 云,然后发送到您的 Bolt WiFi 模块。现在你有一个 RC 机器人可以用它做你想做的事。可以用它来做很多事情,你可以在上面附加一些传感器,或者让它自动或者你想要的任何东西。
-
制作一个迷你平衡机器人2022-07-07 2602
-
微信控制的家庭智能机器人(附语音聊天、人脸检测、自主巡航等)2020-09-30 3813
-
机器人与互联网对工业互联网发展的作用2020-09-08 6138
-
家庭智能小管家机器人资料分享!2019-10-09 3677
-
工业互联网2016-01-25 3805
-
未来社会为何更需要搬运机器人2015-12-23 6783
-
基于互联网的遥控机器人系统2015-11-30 489
-
【Tisan物联网申请】全地形消防侦查机器人2015-10-21 3499
-
【TL6748 DSP申请】基于物联网的六足爬行机器人2015-09-09 2153
-
【MiCOKit申请】基于物联网的六足爬行机器人2015-08-09 2745
-
【OK210申请】基于物联网的六足爬行机器人2015-08-07 2399
-
【MiCOKit申请】基于互联网的远程操控机器人2015-07-24 2869
-
制作一个简易的机器人2015-02-09 21953
-
如何远程控制机器人?2014-10-25 5059
全部0条评论

快来发表一下你的评论吧 !
