

使用myPalletizer人工智能套件实现颜色和图像识别
电子说
描述
基于Linux系统和ROS中的1:1仿真模型,myPalletizer人工智能套件由视觉、定位抓取和自动分拣模块组成。具有配备的视觉功能,通过OpenCV识别和定位不同颜色或图像的立方体,机械臂的核心处理器可以计算其当前目标空间坐标位置,最后将立方体夹入相应的桶中。
下面是使用myPalletizer 260 Pi 人工智能套件,实现颜色和图像识别的详细过程。

一、颜色识别
1.在桌面使用Ctrl+Alt+T组合快捷键开启一个命令窗口,输入以下命令启动master节点:
roscore
2.在命令终端中键入Ctrl+Shift+T开启同目录下的另一个命令窗口,再输入命令启动vision.launch文件
roslaunch myPalletizer_260 vision.launch
运行结果如图所示:
3.Ctrl+Alt+T打开另一个命令窗口,输入命令进入到待操作文件目录
cd catkin_ws/src/mycobot_ros/mycobot_ai/myPalletizer_260/
4.运行程序detect_obj_color.py ,即可实现颜色识别并抓取了。
python scripts/detect_obj_color.py
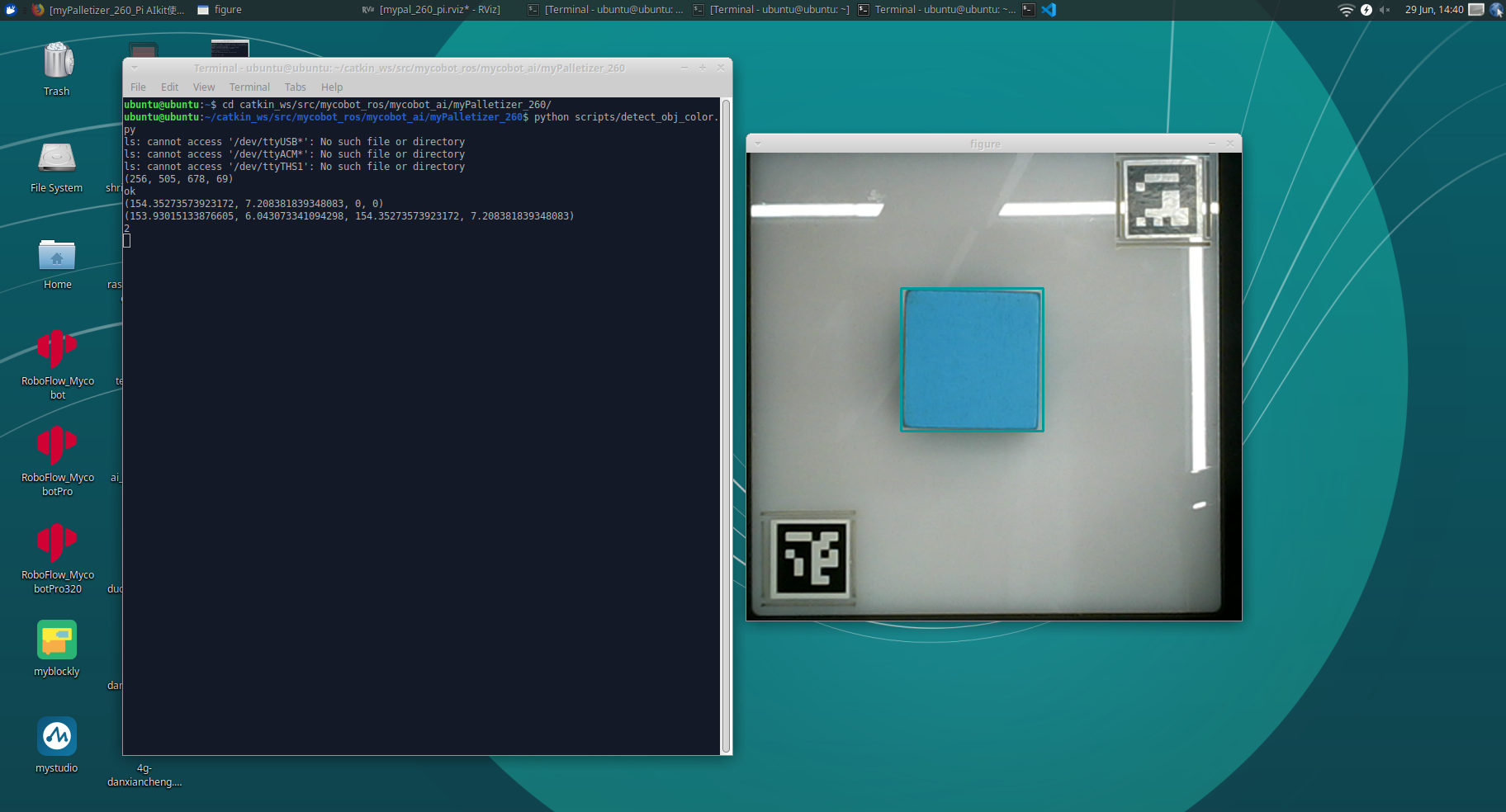
之后我们可以看到如下:
二、图像识别
1.运行detect_obj_img_folder_opt.py 程序前,请确保已执行颜色识别中的步骤1,2,3
2.运行添加图片的程序add_img.py,根据你的需要把要识别的图片添加到指定文件夹('red', 'blue', 'green', 'gray')
python scripts/add_img.py
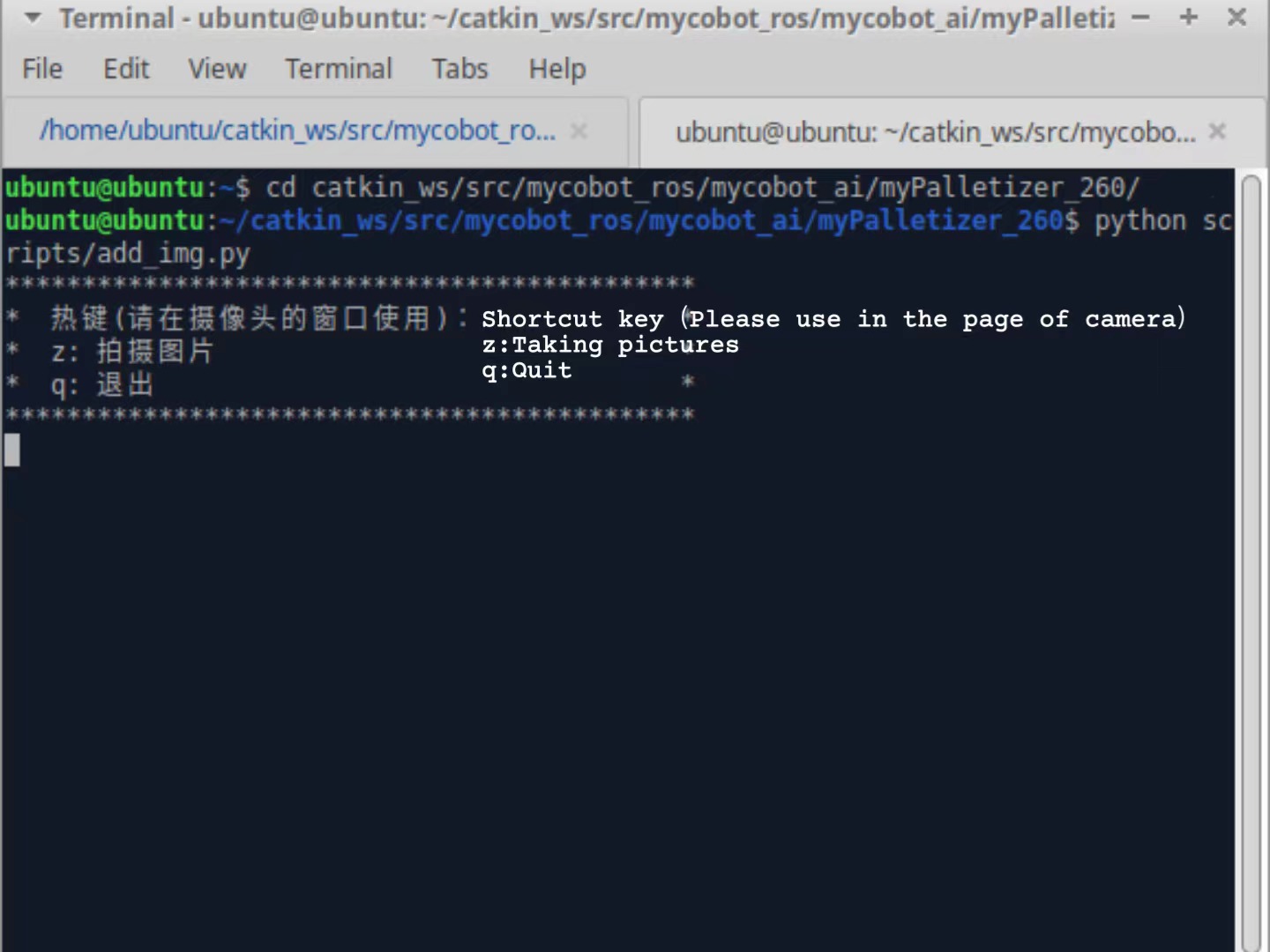
根据终端输入的提示进行操作,在弹出的第二个图像框中进行图像的截取(通过鼠标左键进行图像区域的选取)。
3.图像截取区域完成后,按下回车键,根据终端提示,输入保存图像的文件夹名称('red', 'blue', 'green', 'gray'),按下回车键即可保存至对应文件夹。
4.启动图像识别程序detect_obj_img_folder.py ,验证步骤2,3中添加的图片机械臂是否能正确吸取并放到相对应颜色的桶中。
python scripts/detect_obj_img_folder_opt.py
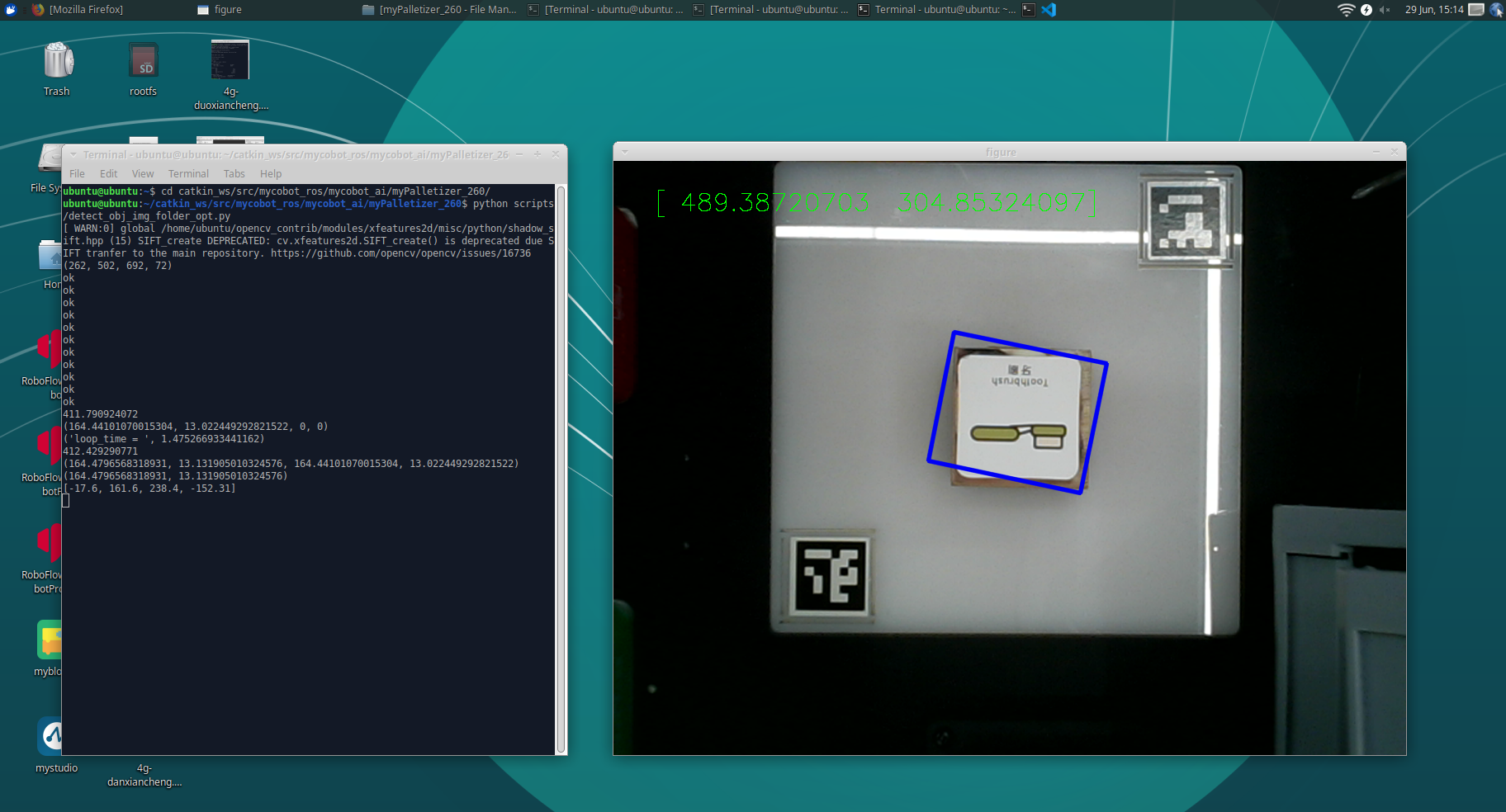
然后,我们可以得到如图所示的结果:
这款产品为研发人员以及STEM教育工作者量身定做,他们会对人工智能套装与机器人相结合的应用程序感兴趣。如果你拥有这款人工智能套件,除了颜色和图像识别,你还想实现什么应用场景?请在评论中与我们分享!
审核编辑:汤梓红
-
百度人工智能大神离职,人工智能的出路在哪?2017-03-23 8093
-
初学AI人工智能需要哪些技术?这几本书为你解答2019-01-21 9784
-
东芝新一代图像识别人工智能处理器ViscontiTM5的DNN硬件IP2019-07-25 3366
-
人工智能语音芯片行业的发展趋势如何?2019-09-11 5297
-
人工智能图像识别芯片“凌芯01”2021-07-15 1535
-
图像识别究竟是如何做到识别出不同的物体的2021-08-31 1828
-
人工智能在智能家居领域的应用系列之:图像识别2017-01-12 6586
-
如何实现图像识别?为什么要入局图像识别?2018-08-29 9290
-
干货分享|如何利用LabVIEW实现汽车仪表图像识别2019-07-05 11646
-
图像识别技术在农业领域的应用2021-03-19 6166
-
图像识别技术原理 深度学习的图像识别应用研究2023-07-19 1151
-
卷积神经网络用于图像识别的原理2023-08-20 2402
-
图像识别技术原理 图像识别技术的应用领域2024-02-02 5433
-
图像识别属于人工智能吗2024-07-16 3481
-
AI图像识别摄像机2024-11-08 1986
全部0条评论

快来发表一下你的评论吧 !
