

ADAS车道偏离检测技术
电子说
描述
车道偏离预警系统(Lane Departure Warning System)是ADAS系统的重要功能之一,可以根据前方道路情况和自车位置的关系,来检测和判断车辆偏离车道的潜在危险,并对驾驶员进行及时提醒,避免因驾驶员疏忽、分心等原因而造成车道偏离事故。
据美国道路安全机构研究表明:约有50%的汽车交通事故是因为汽车偏离正常行驶车道引起的,车道偏离也被看成车辆侧翻事故的主要原因。而车道偏离警示系统则能将事故死亡率降低86%。
目前国内对车道偏离预警系统有明确的标准体系,国标GB/T 26773-2011《智能运输系统 车道偏离报警系统 性能要求与检测方法》,规定了对乘用车和商用车车道偏离报警的要求。行业标准JT/T883-2014《营运车辆行驶危险预警系统技术要求和试验方法》也基于GB/T 26773对营运类车辆的车道偏离状态报警功能进行了说明。
LDWS系统主要包含三大模块:环境感知、偏离决策和预警输出。首先通过摄像头等传感器获取前方道路环境信息,然后结合自车的行驶状态、与车道线的距离、以及车道偏离的越界时间来判断车辆偏离情况,并根据预警规则决定是否发出预警信息。
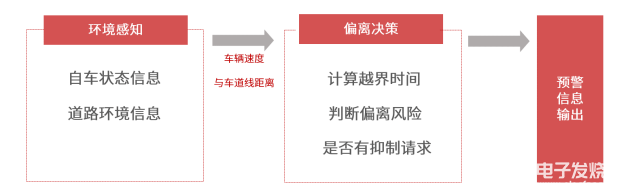
LDWS基本流程示例
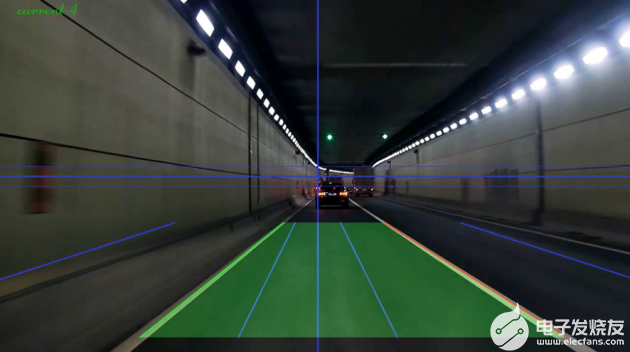
LDWS通过车载摄像头等传感器来感知环境,因此前期摄像头的安装、标定和校对会影响后期的检测准确度。比如在虹软方案中,会将ADAS摄像头安装在车辆挡风玻璃正中间,使前方道路清晰可见;并调整摄像头的俯仰角,让359°的地平线与远处的地平线(地面与天空相交的线)重合,保证地平线在视野中央位置:此时若车辆在车道内居中直行,则左右车道线对称显示在画面两侧。

ADAS摄像头安装位置示意
同时,为了排除车身存在的干扰因素,虹软算法在实际应用和标定时,还将车身宽度、车轮与摄像头的相对位置、车头与摄像头的相对位置均加入到预设指标中,由此可以适配不同外观形态的车辆,且能更准确地判断车身与车道线的距离,使预警系统更为精准。
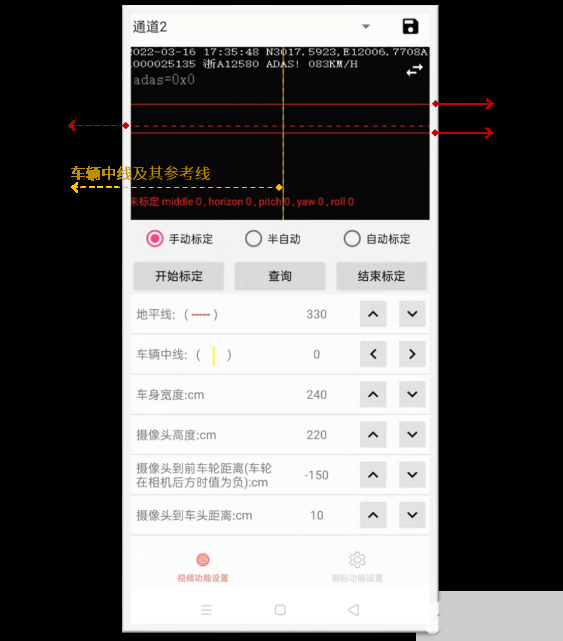
虹软ADAS摄像头标定示例
在通过摄像头初步获取环境信息后,LDWS需要进行车道线检测、车道线跟踪以及车道偏离检测这三大重要步骤。
虹软的车道线检测是基于深度学习的,在捕捉道路图像后,先截取其中感兴趣的图像区域,并通过卷积神经网络将图像中的车道线特征提取出来,据此可以预测选取的感兴趣区域内是否有车道线以及车道参数、方向和位置。但在车道线检测过程中,常常会出现很多干扰因素,诸如车道线磨损、树荫遮挡、积水影响等等情况,都会导致车道线检测误差,于是又用车道线跟踪来帮助提升算法检测的鲁棒性。

车道线跟踪,是利用车辆行驶时环境信息数据的连续性和关联性,通过多张图像信息,在前一时刻检测结果的基础上预判下一时刻车道线的位置和方向。常用的是基于滤波法来确定下一帧感兴趣区域,在该区域内检测车道线,以减少检测时间以及其他干扰因素影响。
车道线检测和跟踪图示
虹软LDWS算法中检测和跟踪的目标车道线功能符合行标JT/T883要求,车道偏离报警能检测到以下车道线并进行有效预警:
黄色和白色实线
黄色和白色虚线
双黄和双白实线
双黄和双白虚线
黄色和白色虚实线
完成车道线检测和跟踪后,就可以进一步判断车道偏离情况。虹软通过深度学习方法检测出画面中的所有车道线,结合实际驾驶情况,主要检测自车当前所在的车道线,即离自车最近的两条车道线。根据自车车身与所在车道左右车道线之间的横向距离以及横向距离的变化,来判断车辆是否出现车道偏离状况。判断逻辑与主流方法一样,主要参照了国标GB/T 26773——其中定义了报警临界线、最早报警线、最晚报警线和车道偏离点等,并由此计算出报警的触发时机。
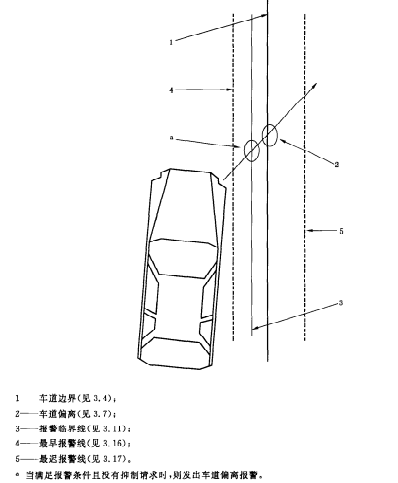
TTLC为出现车道偏离所需时间,D指的是车辆特定部位(车身)与车道边界的横向距离,v则为车辆偏离速度。在划定好LLTC值的情况下,报警临界线会受偏离速度影响而变化,但最早报警线位置一般在车道线内0.75-1.5m的范围内浮动。
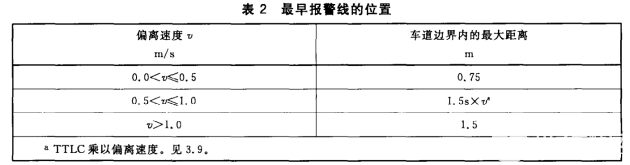
针对最迟报警线,乘用车和商用车的要求有所差异,乘用车最迟警报线为车道线边界外侧0.3米,商用车则为1米。车道偏离预警系统须在汽车越过最早报警线、未碰到最迟报警线期间触发。
通过实车道路测试,虹软车道偏离检测的检出率和准确率均在95%以上 ,误检率低。
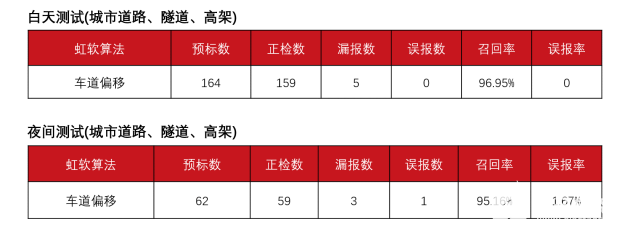
车道线偏移报警检测测试示例
在乘用车和商用车前后装领域,虹软视觉ADAS技术经过了长时间的验证,有很多成熟的落地使用案例,获得了业内的普遍认可,但提升精度、提高速率、降低成本仍是不断优化迭代的方向。
审核编辑 黄昊宇
-
怎么实现单目视觉车道偏离报警系统的设计?2021-05-13 1379
-
【HarmonyOS HiSpark AI Camera】车载adas应用申请使用2020-11-19 537
-
ADAS技术上有问题吗?2020-08-25 1724
-
怎么设计基于FPGA的车道偏离预警系统?2019-09-18 1953
-
关于车道偏离预警系统和前碰撞预警系统分析介绍和应用2019-08-23 9407
-
ADAS车道偏离系统介绍2019-08-08 3804
-
高级辅助驾驶ADAS技术2019-04-03 2646
-
汽车先进驾驶员辅助系统ADAS:车道偏离告警系统资料分享2018-11-06 3778
-
基于TMS320DM6437的车道偏离报警系统设计2017-10-21 1282
-
ADAS方案设计成功关键:图像处理技术2014-09-01 4386
-
EVP-6100演示视频 车道偏离警示系统2010-11-18 840
-
车道偏离报警(ldw)系统技术2010-09-25 5210
-
基于图像处理的车道偏离的研究和实现2010-03-01 601
-
基于机器视觉的车道偏离预警系统的实现2009-11-16 885
全部0条评论

快来发表一下你的评论吧 !
