

单应性矩阵计算函数与应用
描述
单应性矩阵计算函数与应用
OpenCV在通过特征描述子完成描述子匹配之后,会得到一些关键点对,我们会把这些关键点对分别添加到两个vector对象中,作为输入参数,调用单应性矩阵发现函数来发现一个变换矩阵H,函数 findHomography 就完成了这样的功能,常见的调用代码如下:
1//-- Localize the object
2std::vector obj_pts;
3std::vector scene_pts;
4for (size_t i = 0; i < goodMatches.size(); i++)
5{
6 //-- Get the keypoints from the good matches
7 obj_pts.push_back(keypoints_obj[goodMatches[i].queryIdx].pt);
8 scene_pts.push_back(keypoints_sence[goodMatches[i].trainIdx].pt);
9}
10Mat H = findHomography(obj_pts, scene_pts, RHO);
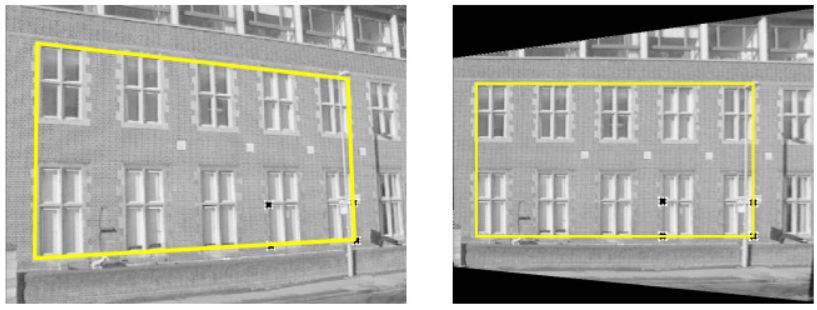
有了变换矩阵H之后,我们就可以根据输入图像四点坐标,从场景图像上得到特征匹配图像的四点坐标,代码实现如下:
1//-- Get the corners from the image_1 ( the object to be "detected" )
2std::vector obj_corners(4);
3obj_corners[0] = Point(0, 0); obj_corners[1] = Point(box.cols, 0);
4obj_corners[2] = Point(box.cols, box.rows); obj_corners[3] = Point(0, box.rows);
5std::vector scene_corners(4);
6perspectiveTransform(obj_corners, scene_corners, H);
其中scene_corners为对象在场景图像中的四点坐标,获得坐标以后就可以绘制对应的矩形,从而在场景图像中绘制对象的外接矩形区域。运行结果如下:

上述步骤中最重要的就是单应性矩阵H的计算,这里我们首先来看一下该函数与其各个参数解释:
1Mat cv::findHomography (
2 InputArray srcPoints,
3 InputArray dstPoints,
4 int method = 0,
5 double ransacReprojThreshold = 3,
6 OutputArray mask = noArray(),
7 const int maxIters = 2000,
8 const double confidence = 0.995
9)
参数解释如下:
srcPoints:特征点集合,一般是来自目标图像
dstPoints:特征点集合,一般是来自场景图像
method:表示使用哪种配准方法,支持有四种方法(后续详细说)
0 – 使用所有的点,比如最小二乘
RANSAC – 基于随机样本一致性
LMEDS – 最小中值
RHO –基于渐近样本一致性
ransacReprojThreshold:该参数只有在method参数为RANSAC与RHO的时启用,默认为3
mask:遮罩,当method方法为RANSAC 或 LMEDS可用
maxIters:最大迭代次数,当使用RANSAC方法
confidence:置信参数,默认为0.995
单应性矩阵H发现方法
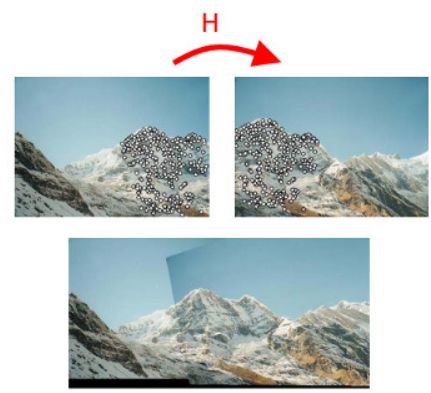
首先简单的解释一下H的作用,假设在特征匹配或者对齐,视频移动估算中有两张图像image1与image2,image1上有特征点(x1,y1)匹配image2上的特征点(x2,y2),现在我们需要在两者之间建立一种视图变换关系(透视变换),图示如下(图二):

其中H是一个3x3的矩阵
这样为了求出H中的参数,需要两个点对集合,就是findHomography函数中前两个输入参数,理想情况下,通过特征提取得到特征点会再下一帧或者场景图像中保持不变,但是实际情况下,收到各种因素的影响,会额外产生很多特征点或者干扰点,如果正确的剔除这些干扰点,得到正确匹配的点,利用正确匹配点计算出H才是比较稳定的方式。
01
最小二乘拟合
很明显,图二所示的是一个过约束问题,如果没有干扰点的话,就可以通过最小二乘进行直接拟合,求的参数,其中错误计算如下:

基于过约束方程计算得到错误,反向传播不断更新参数,直到两次错误差值满足要求阈值为止。
02
RANSAC
最小二乘方法在描述子匹配输出的点对质量很好,理想情况下是图像没有噪声污染与像素迁移与光线恒定,但是实际情况下图像特别容易受到光线、噪声导致像素迁移,从而产生额外的多余描述子匹配,这些点对可以分为outlier跟inlier两类,基于RANSAC(Random Sample Consensus)可以很好的过滤掉outlier点对,使用合法的点对得到最终的变换矩阵H。RANSAC算法基本思想是,它会从给定的数据中随机选取一部分进行模型参数计算,然后使用全部点对进行计算结果评价,不断迭代,直到选取的数据计算出来的错误是最小,比如低于0.5%即可,完整的算法流程步骤如下:
选择求解模型要求的最少要求的随机点对
根据选择随机点对求解/拟合模型得到参数
根据模型参数,对所有点对做评估,分为outlier跟inlier
如果所有inlier的数目超过预定义的阈值,则使用所有inlier重新评估模型参数,停止迭代
如果不符合条件则继续1~4循环。
通常迭代次数N会选择一个比较高的值,OpenCV中默认迭代次数为200,确保有一个随机选择点对不会有outlier数据,
03
PROSAC(RHO)
注意有时候RANSAC方法不会收敛,导致图像对齐或者配准失败,原因在于RANSAC是一种全随机的数据选取方式,完全没有考虑到数据质量不同。对RANSAC算法的改进算法就是PROSAC(Progressive Sampling Consensus)即渐近样本一致性,该方法采用半随机方法,对所有点对进行质量评价计算Q值,然后根据Q值降序排列,每次只在高质量点对中经验模型假设与验证,这样就大大降低了计算量,在RANSAC无法收敛的情况下,PROSAC依然可以取得良好的结果。OpenCV中的RHO方法就是基于PROSAC估算。
04
LMEDS
最小中值方法拟合,该方法可以看成是最小二乘法的改进,原因在于计算机视觉的输入数据是图像,一般都是各自噪声,这种情况下最小二乘往往无法正确拟合数据,所以采用最小中值方法可以更好实现拟合,排除outlier数据。但是它是对高斯噪声敏感算法。它的最主要步骤描述如下:
随机选取很多个子集从整个数据集中
根据各个子集数据计算参数模型
使用计算出来的参数对整个数据集计算中值平方残差
最终最小残差所对应的参数即为拟合参数。
05
对比测试
最后看一下OpenCV中使用单应性矩阵发现对相同的特征点对,分别使用RANSAC、PROSAC、LMEDS进行参数矩阵H的求解结果对比,显示如下:
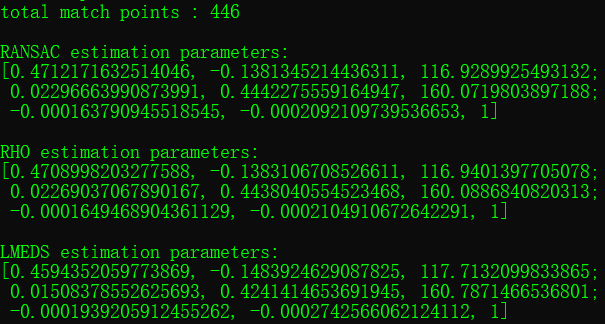
总数446个匹配点对,三种评估方式生成的H矩阵(3x3)很明显值都不尽相同。
一般情况下在,推荐大家使用RANSAC或者RHO。默认的0表示最小二乘方法,对图像匹配在实际应用中一般都是翻车!LMEDS方法只有在inlier超过50%以上情况下才会拟合生成比较好的H参数,而RANSAC或者RHO不管outlier跟inlier比率是多少都会可以适用,可以大家也都注意到h33总是等于1,因为h33在这里作用是保持标准化尺度。在OpenCV中如果无法正确估算参数H,会返回空Mat对象。
单应性矩阵应用
图像透视变换与对象匹配
图像拼接
最后的话
我在2019年的文章汇总中说,2020年少写废话,但愿此篇不是废话,我为了写好它也是伤神很久,算是自己尽力了,也是回答了平时一些人总问我的问题,欢迎大家指正与反馈!如果觉得不错,点个赞我就很满足了!
-
TC264有矩阵库或三角函数的加速库吗?2024-03-05 5247
-
曦智科技提出计算新原理—光子矩阵计算(oMAC)2023-08-25 4124
-
如何使用M4 DSP来计算矩阵函数2023-08-22 480
-
二端口矩阵与系统函数2023-03-02 12005
-
单应性矩阵计算函数与应用2022-09-26 2522
-
CMSIS-DSP的arm_mat_init_f32矩阵求逆函数结果不对怎么解决2021-12-13 1183
-
51单片机(三十)—— 矩阵键盘计算器2021-11-19 1766
-
如何计算ARM内核矩阵?2021-11-05 1421
-
如何使用arm内核库的矩阵计算函数2021-07-16 1143
-
基于低密度生成矩阵和哈希函数的安全签密方案2017-12-12 1147
-
基于单应性矩阵的棋盘格角点检测研究2012-04-20 1320
-
大型矩阵在工程使用中应注意的问题2010-02-09 420
-
MATLAB矩阵函数命令2009-09-22 4982
全部0条评论

快来发表一下你的评论吧 !
