

了解 AV 复杂性
电子说
描述
自动驾驶汽车的发展继续吸引交通和其他工业领域的大量投资。这些赌注是必要的,因为许多棘手的技术问题仍远未解决。
在我看来,这里有三个关键问题:
为什么 AV 问题如此难以解决?
不同的 AV 用例如何影响 AV 问题?
部署 AV 用例将如何演变?
为了回答这些问题,我们在三个图表中总结了一个演示文稿,旨在为新手和专家提供一些视角。
AV复杂性问题
自动驾驶汽车的基本问题是为 SAE 4 级功能开发安全、可靠的自动驾驶汽车所涉及的巨大复杂性。第一张图表总结了这些挑战。
点击查看完整大小的图片
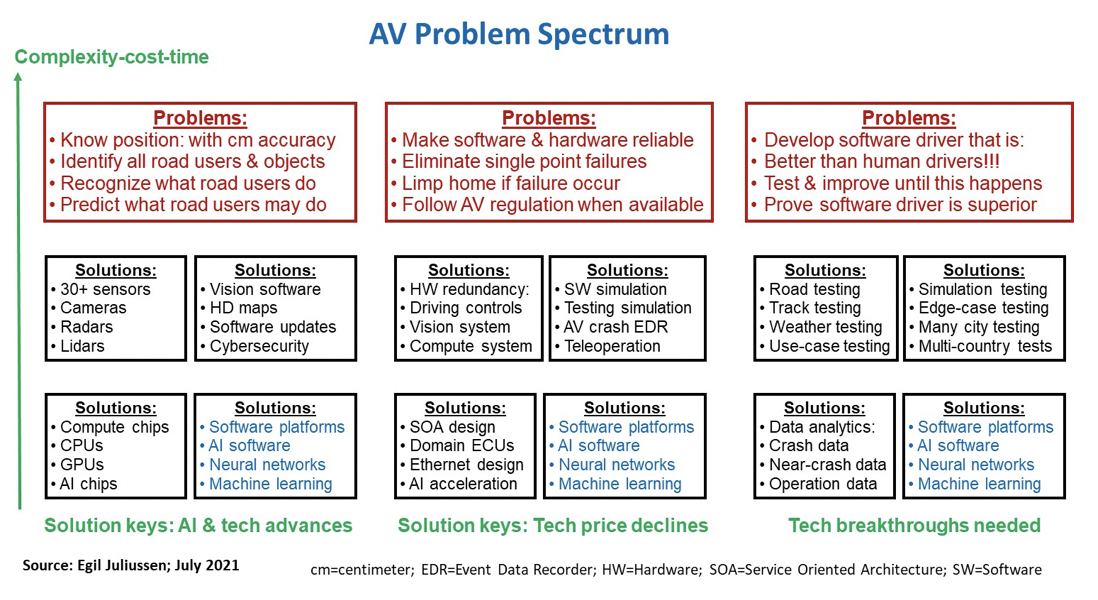
如上图所示,AV 问题在红色块中分为三组。潜在的解决方案列在 12 个黑框中——每个问题组四个框。请注意,三个框的蓝色文本相同——因为需要软件平台,包括机器学习和神经网络在内的人工智能软件来解决这三个问题类别。
首先是在大多数情况下以厘米级精度了解 AV 的确切位置。下一步是对所有道路使用者和物体进行分类,包括他们正在做什么(如果有的话),并预测他们在接下来的几秒钟内可能会做什么。
这些问题的解决方案是大量传感器、强大的计算能力以及管理多个复杂系统所需的平台和人工智能软件。例如,一辆典型的自动驾驶出租车需要 30 多个传感器,包括摄像头、雷达和激光雷达。例如,Zoox最近发布的自动驾驶出租车公告列出了 64 个传感器:28 个摄像头、20 个雷达和 16 个激光雷达。
处理传感器数据也需要基于 AI 的视觉软件。大多数 AV 都需要高清地图才能准确确定位置。
所有软件和硬件系统都需要广泛的网络安全保护。软件还必须使用内置的无线 (OTA) 软件更新功能定期更新。
第二个问题是确保 AV 硬件和软件的可靠性,没有单点故障。如果发生故障,则需要所谓的“跛行回家”功能,至少可以将车辆引导到路边。
随着AV 法规的引入,安全和操作规则必须作为系统和可靠性设计的一部分。
还需要系统设计中的硬件冗余。至少三个 AV 系统需要冗余:驾驶控制(转向、制动、速度);视觉传感器能力(三类);和计算。
系统架构必须使用能够简化软件平台合作的技术,从而实现强大的网络安全和 OTA 更新。最近的一篇专栏文章涵盖了这些主题。
这些系统仍然相当昂贵,并且需要显着降低成本。幸运的是,基于芯片的技术可以节省大量成本,尤其是对于最昂贵的组件:激光雷达。
AV 组件的仿真至关重要,包括软件和硬件以及所有类型的测试和建模。
将需要 AV 事件数据记录器来深入了解碰撞情况以及可以采取哪些措施来提高安全性。远程操作也正在成为 AV 监管的标准,并且在解决边缘情况时可能成为跛行能力的关键。
第三个问题是开发一个超越人类驱动程序的软件驱动程序。到底好多少还在争论中。很明显,AV 开发人员必须继续测试和改进他们的系统。开发时间将取决于用例。
边缘案例测试被广泛使用,基本上意味着发现软件驱动程序以前没有见过并且可能不知道如何处理的新驾驶情况。将新的边缘案例添加到软件驱动程序功能可能被认为是最高优先级。
另一个难题是确认 AV 软件驱动程序可以胜过人类驱动程序。目前尚不清楚 AV 法规和未来的 AV 型式认证将如何处理这一重要问题。
解决方案主要涉及测试,分析大量测试数据以识别软件驱动程序的弱点,然后进行更多测试。幸运的是,这种测试的大部分模拟速度比道路测试高得多——在模拟模式下每天的英里数是道路测试的 100 倍。这些模拟侧重于边缘情况和类似情况。
测试必须包括不同的天气和照明条件。大多数历史上的 AV 测试都是在理想的天气条件下完成的。因此,需要更大的真实世界模拟。
视音频用例
上述复杂性将根据 AV 用例而有很大差异。AV 复杂性主要由驱动复杂性决定。下图概述了 AV 用例复杂性,重点关注 SAE L4 部署。不包括这些场景的许多变体。
点击查看完整大小的图片
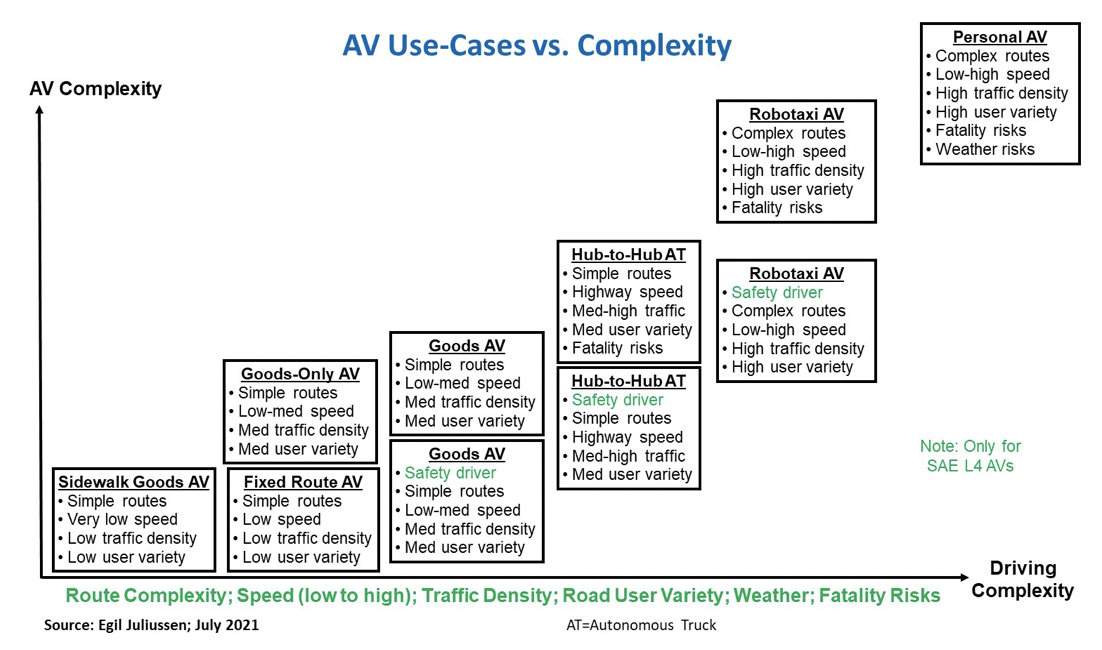
上图显示了各种 AV 用例如何适应二维空间,AV 复杂性在 y 轴上增加,驱动复杂性在 x 轴上增加。驾驶复杂性包括路线障碍、驾驶速度、交通密度、道路使用者种类(汽车、自行车、行人等)和天气条件。还列出了死亡风险,主要由速度决定。一些 AV 用例的死亡风险非常低。
低 AV 复杂性
低 AV 复杂性是指简单的路线、低速和低用户或交通种类。在最简单的层面上,操作仅限于封闭区域,例如校园、办公园区或军事基地。人行道送货车与多个玩家一起最远。人行道 AV 领导者 Starship 在 2021 年 5 月的交付量超过了 150 万次,并且很快将超过 200 万次。
固定路线 AV 的 AV 复杂性也较低,市场利基包括多个参与者。由于 AV 价格高昂,部署缓慢,但已在数百个城市进行测试。应用包括低复杂性的公交路线和/或封闭环境。
固定路线的自动驾驶汽车也可能用于灵活的旅行,例如按需接送。最近于 2021 年 7 月发布的 ISO 22737 低速自动驾驶 (LSAD) 法规应该会对固定路线自动驾驶汽车的部署产生积极影响。
用于最后一英里交付的纯货物自动驾驶汽车带来了更多的交通复杂性,比人行道自动驾驶汽车以更高的速度在道路上行驶。货车和小型卡车也可以改装为 AV 送货车。他们正在使用安全驾驶员进行测试。
中等 AV 复杂性
此类别包括几个 AV 场景。没有安全驾驶员的低速货物自动驾驶汽车属于这一类。也可能包括具有枢纽到枢纽路线的自动卡车,但目前需要一名安全驾驶员。此类别也称为中英里卡车运输。
如果安全驾驶员被移除,远程操作监控可用于枢纽到枢纽卡车运输和机器人出租车。大多数 AV 法规都要求将远程操作作为管理 AV 的最后手段,以防它们被卡住。远程操作也可能成为一种更普遍的技术,最终取代安全驾驶员。
高 AV 复杂性
上图包括三个具有高 AV 复杂性的用例。枢纽到枢纽的卡车运输用例在这一类别中最低,其次是机器人出租车。仍处于设计阶段的个人 AV 也将被归类为高复杂性。个人 AV 可能会受益于在都市区部署机器人出租车的经验。
AV 用例部署
AV 部署将从简单过渡到复杂。下面稍作修改的用例图表将 x 轴更改为表示时间线,贴上绿色标签表示用例块的重新排列。AV 用例的定位是反映他们在时间线上何时可能会看到有意义的使用。
点击查看完整大小的图片
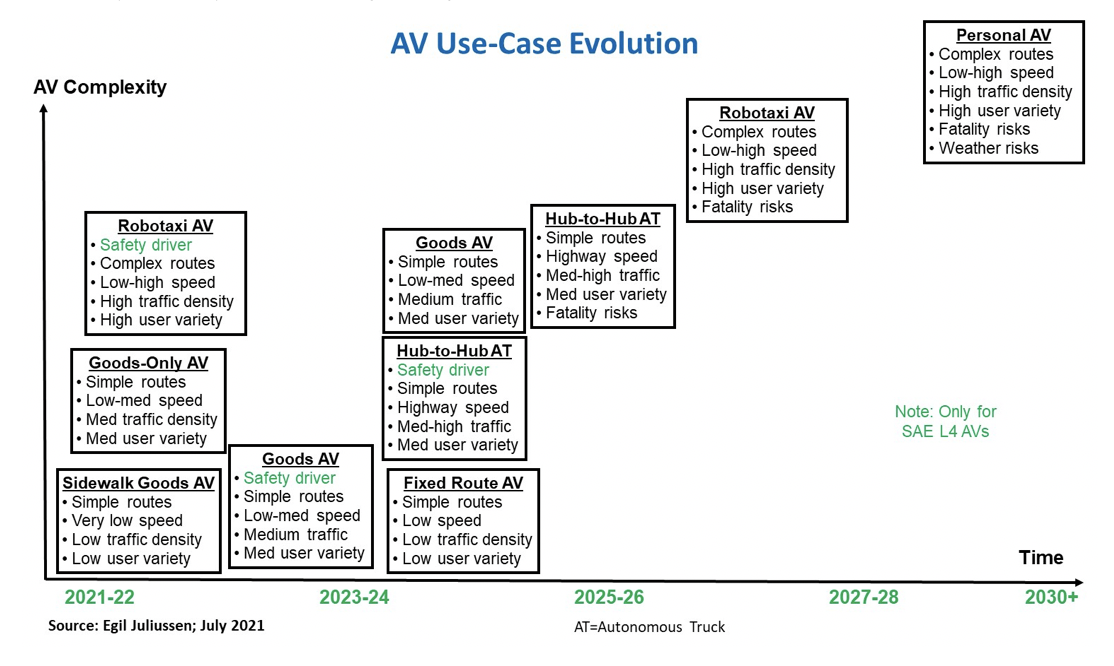
在这种情况下,人行道自动驾驶汽车的部署率最高,在许多城市提供餐食、杂货和其他小包裹。人行道自动驾驶汽车也是最便宜的产品,因为传感器更少,重量更轻,行人速度更慢。撞到某人或某物的风险相对较低。
纯货 AV 以Nuro送货车为代表,主要处于测试模式。当前的广告表明,Nuro 可能已准备好进行更广泛的部署。
机器人出租车主要仍处于测试阶段,配备安全驾驶员。Waymo 在其凤凰城地区的大部分测试中都移除了安全驱动程序。一些自动驾驶出租车运营商已获准在美国和中国的一些城市对其服务收费。
带有安全驾驶员的货物自动驾驶汽车还为商店和/或仓库之间的最后一英里或中间一英里的运营提供包裹。
EasyMile、Local Motors 和 Navya 等固定路线自动驾驶汽车已在多个国家/地区进行了广泛的测试。大流行停止了大多数测试,这些测试的重点是每次乘车最多运送 12 名乘客。最近的 ISO LSAD 法规涵盖了这一用例,并应在未来几年启动固定路线 AV 的使用。
与安全驾驶员一起使用的集线器到集线器自动卡车的测试越来越多。其中大部分包括将货物运送给付费客户。
其余类别更难部署,并且会比上图显示的更晚到达。集线器到集线器的自动卡车部署可能会在 2025 年左右发生。机器人出租车的大规模部署是几年后的事,但据一些机器人出租车的希望者称,可能会在少数城市发生。个人 AV 将明显晚于机器人出租车。
人工智能解决复杂性
AV 技术仍然很难做到,但一些用例的复杂性较低,并且部署数量有限。针对更简单的 AV 场景的法规正在出现,许多公司最终将部署法规允许的内容。
所有 AV 法规都需要远程操作,但它也可用于删除安全驱动程序,以便提前部署某些用例。
AV 系统成本目前由昂贵的激光雷达主导,未来五年将迅速下降。这意味着 2025 年之后,过高的 AV 系统成本不会成为阻碍因素。
复杂 AV 系统的早期部署最终取决于 AI 技术的突破,这是无法预测的。如果出现这样的创新,潜在用户可能不必等到 2030 年代才能使用个人 AV。
审核编辑 黄昊宇
-
缓冲ADC系列消除了信号调理的复杂性2023-11-22 505
-
使用Emulex SAN管理器降低操作复杂性2023-07-28 579
-
大数据分析学习的挑战:复杂性、不确定性及涌现性2022-11-17 4127
-
驾驭软件定义车辆的复杂性2022-07-14 1824
-
插入排序算法的复杂性、性能、分析2022-04-08 4926
-
如何去降低H.264 INTRA帧编码的运算复杂性?2021-06-07 1742
-
如何用可重构射频前端简化LTE设计复杂性?2021-05-24 1943
-
嵌入式调试的复杂性分析2021-02-19 1190
-
抑制嵌入式系统设计的复杂性解析2020-12-30 1512
-
PCB复杂性怎样来解决2019-08-16 3062
-
基于构件回归测试的复杂性度量框架2018-01-19 1008
-
有效解决实时IoT环境监测的复杂性2016-07-14 860
-
免疫系统的主组织相容复杂性及其应用2009-05-28 838
-
射频波形生成和测量的复杂性2006-03-24 1200
全部0条评论

快来发表一下你的评论吧 !
