

VASS 标准中的预期功能范围
描述
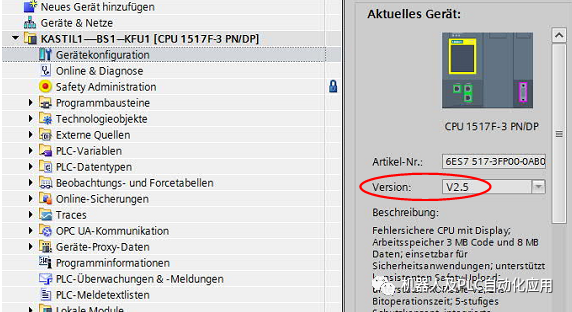
VASS06版使用的CPU为: CPU 1517F
CPU:
为了实现 VASS 标准中的预期功能范围,CPU 1517F至少需要固件版本 V2.5。
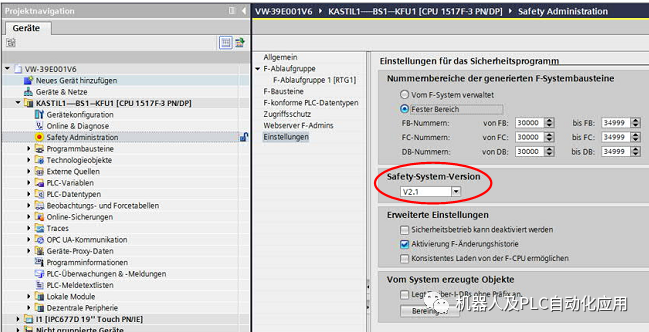
安全系统:
这里需要固件版本 V2.1。
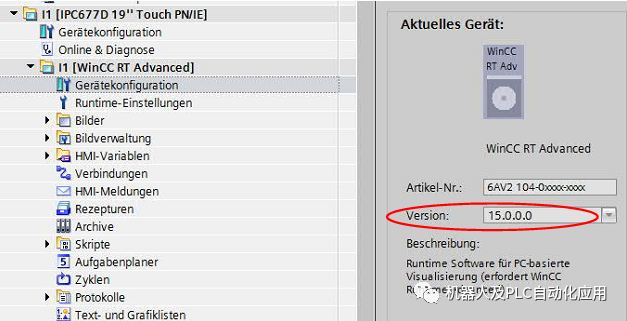
WinCC Runtime Advanced:
必须始终在 WinCC 运行系统的设备组态中设置运行系统软件(WinCC Runtime Advanced)的相应组态。
S7示例项目构成了创建设备特定项目的基础。
它包含所有 S7 技术基本设置和集成的 WinCC Advanced 示例项目,因此可在此处预设所有必要的通讯设置。
这里应该调整以下内容:
· 扩展符号表:
设备特定的 I/O 从设备的 EPLAN 生成并导入符号表。已包含基本符号和注释。
· 调整 OB:
系统 OB“OB82”,“OB83”,“OB86”,“OB123”和“OB250”已集成在示例项目中,
必须使用。
同名的 STEP 7 标准 OB 不包含所有 VASS 功能。OB1作为模板包含在内,必
须由用户通过结构函数的调用进行扩展。
· 创建用户编程:
必须根据设备的顺序或根据机器制造商的指定计划创建调用结构。
· 清理 PLC 项目:
必须删除所有冗余块。通过参考数据检查是否存在双重分配。
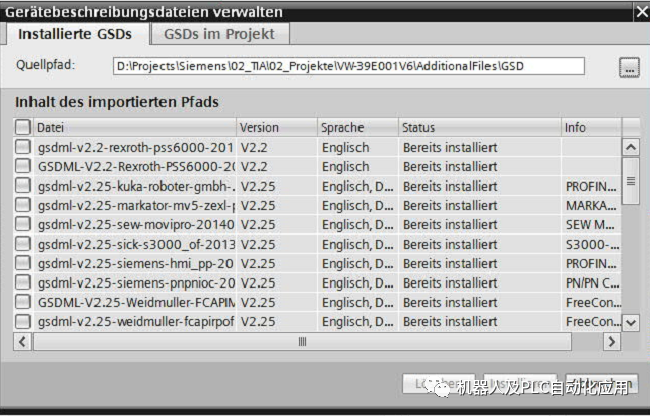
安装 GSD 文件
为了使用设备目录中的设备,必须安装已安装的设备 STEP 7 环境使所需的 GSD 文件。
为此,请打开提供的示例项目;TIA将安装那些尚未安装在 TIA 中的 GSD 文件。也可以通过菜单项“选项à管理设备描述文件(GSD)”在“HW-Config”中安装附加的GSD文件。
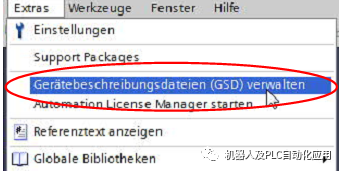
这里可以选择和安装其它 GSD 文件。
CPU PROFINET接口属性
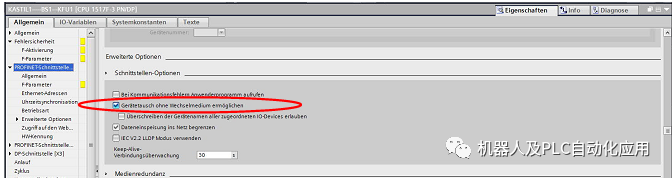
更换设备,无需移动介质
在某些条件下,IO 设备的更换可以在不插入移动介质(例如 MMC)或没有编程设备的情况下执行。为此,通过以太网机制分析各个 IO 设备和 IO 控制器之间的邻域关系。根据存储在 IO 控制器中的这些邻域关系,IO 控制器会检测已更换的 IO 设备并重新定义设备名称。
组态
为了使 IO 设备可以与编程设备互换而不插入可移动介质或没有参数化,必须在“常规”选项卡中的 IO 控制器接口上激活“激活无可移动介质的设备更换”复选框。
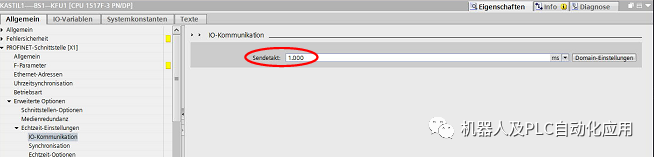
PROFINET IO的通讯组件设置为 100%,发送时钟设置为 1.0 ms。
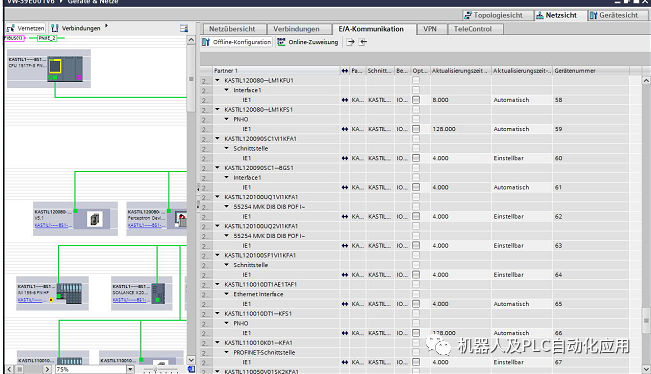
设置用户的更新时间
使用 PROFINET,可以为每个用户单独设置更新时间。
默认情况下,更新时间设置为“自动”以获得相当短的更新时间。例外是在自动设置期间值小于 4 毫秒的用户。这些手动设置为 4.0 毫秒。
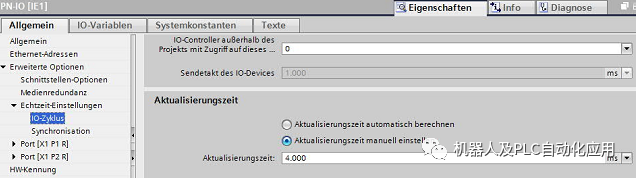
更新时间概述
在“I/O 通讯”选项卡中,可以概览各个用户的设置更新时间。
PROFINET拓扑
还必须为整个 PROFINET IO 系统组态拓扑视图(设备和程序段à拓扑视图)。
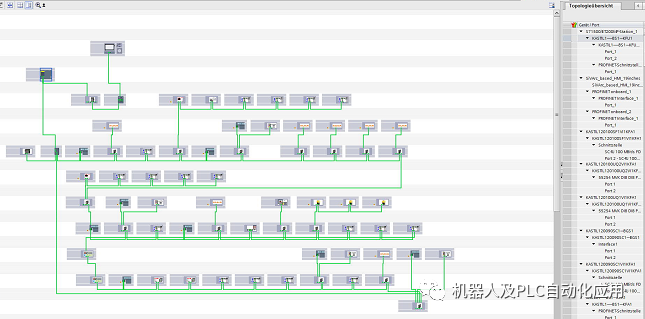
在创建图形视图时,目标是实现所有 PN 用户的最佳无交叉布局。如果可能的话,环网的 PN 用户应该水平放置,并且 stitch 的 PN 用户位于顶部或底部。
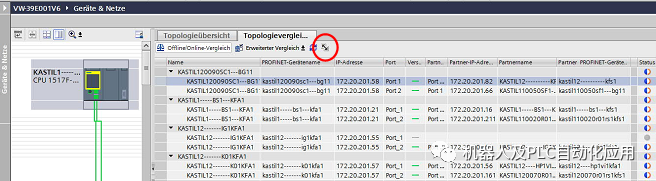
首先,必须在“拓扑比较”选项卡中执行“离线/在线比较”,以检查所有已组态的站是否对应于系统的实际状态。
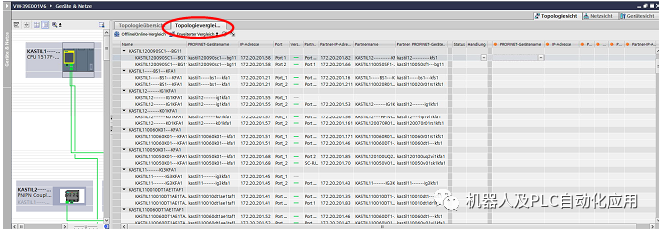
比较后,显示偏差。这些必须与 EPLAN 设计相匹配。
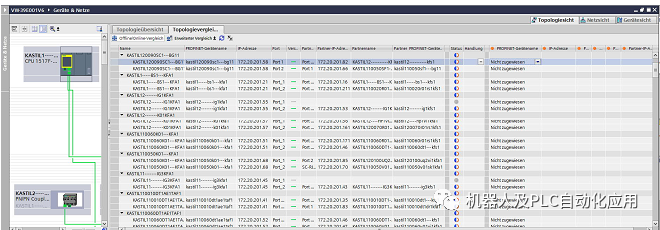
必须在用户处手动编辑,以对没有自动检测的设备的端口互连进行必要调整。
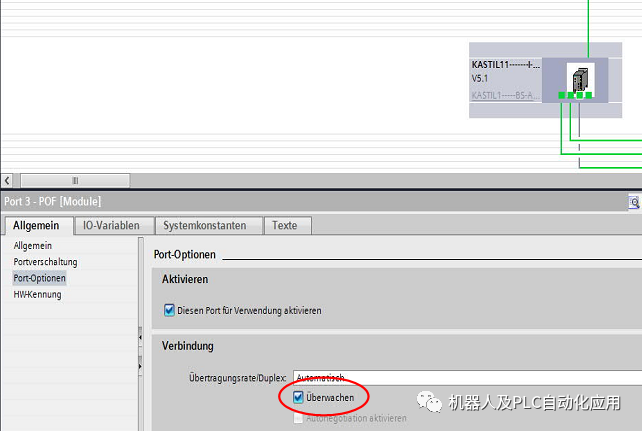
为能采集衰减值,必须在设备和程序段中的 PROFINET 用户上进行以下设置。
在相应端口的属性窗口中,在导航点“连接”中的“端口选项”下,必须选中复选框“监控”。
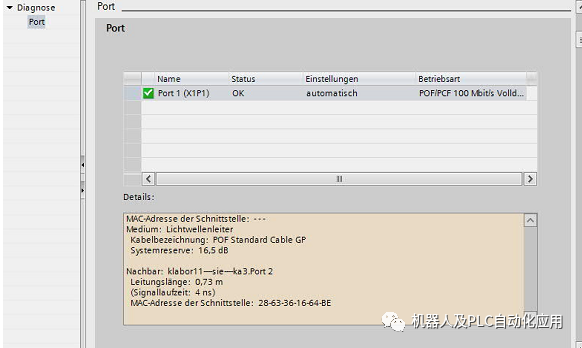
随后,可以在线评估以下诊断:
根据端口执行和分配,必须进行以下设置:
· “自动”
对于铜端口和 POF 端口(POF =聚合物光纤),其在伙伴端口上具有“任何伙伴”设置。
· “自动”,选中“监控”复选框时
对于所有占用的 POF 端口。
端口诊断示例:
· 对于“POF 端口”将监控系统预留。
保护
必须在“保护和安全性”选项卡中进行以下设置:
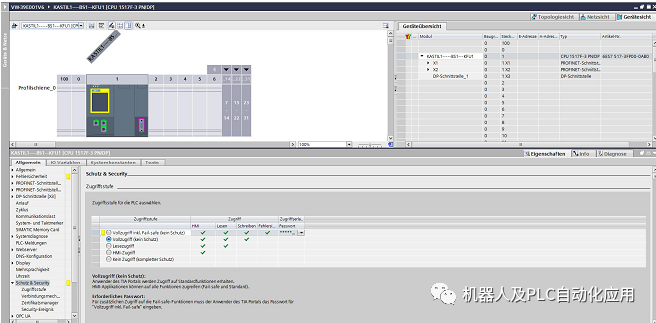
l“保护与安全”中的设置
设置初始密码为“XXXX”(你想设置的数)。
必须选中“F-Capability activated”复选框。
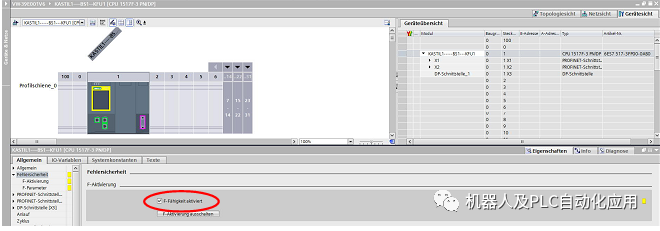
l故障安全
循环监控时间 OB1
最大循环时间必须设置为 50 ms。
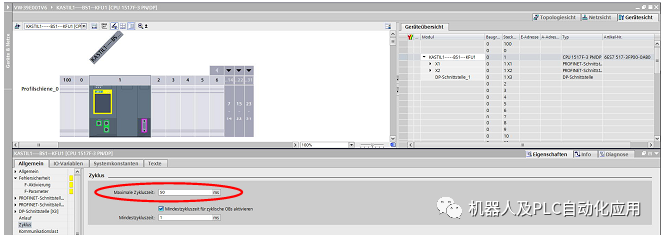
l“循环”中的设置
通讯负载
这里进行“通讯循环负载”的设置。
通讯引起的循环负载应设置为 15%。
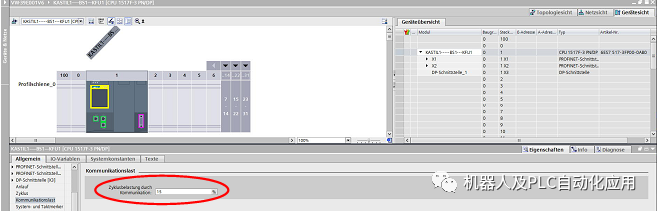
l“通讯负载”中的设置
系统诊断
必须激活此设备(CPU)的系统诊断。
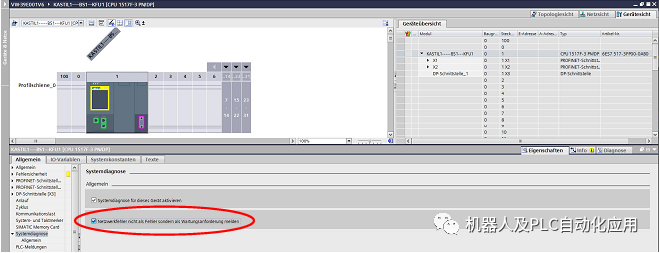
l“系统诊断”中的设置
必须激活 PLC(CPU)中的中央消息管理。
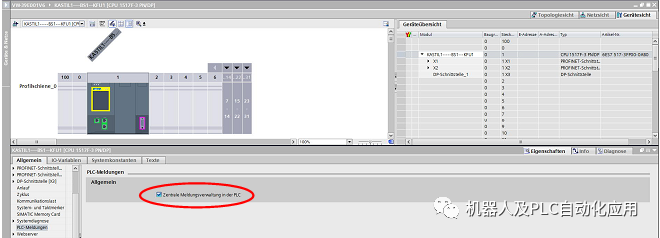
l“PLC消息”中的设置
块调用“SK_xy”
在这些块中,相应地评估和总结每个保护回路的安全输入信号。为了更好地进行程序诊断,链接结果通过相应的输出参数传递。
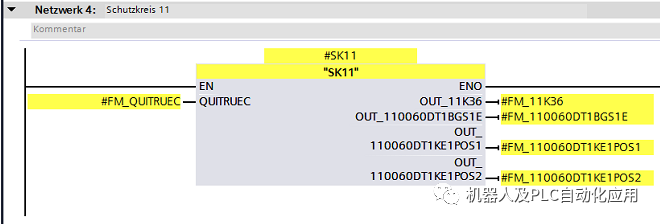
这些构建块的组件不包括:
· 急停信号(à “Emergency_stop_drives”块的组件)
· 安全输入信号,仅在保护回路内工作(à在相应保护回路的负载模块中直接处理)
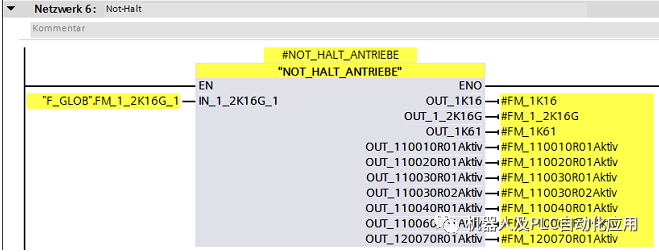
块调用“NOT_HALT_ANTRIEBE”
在该块中,评估和总结急停命令设备,机器人急停电路和驱动开关的信号。链接结果的传递通过相应的输出参数进行。
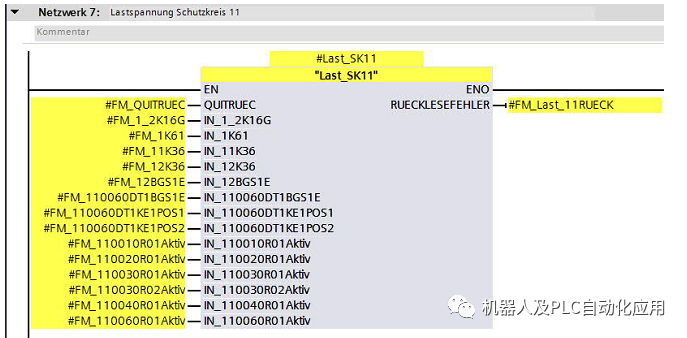
块调用“LAST_SK_xy”
在这些块中,先前形成的和安全的信号彼此链接,并且连接结果被输出到安全 IO 设备。在这些块中也调用用于接触器控制的块。对于每个保护回路,形成相应的Last_SK块。
创建 F 运行组
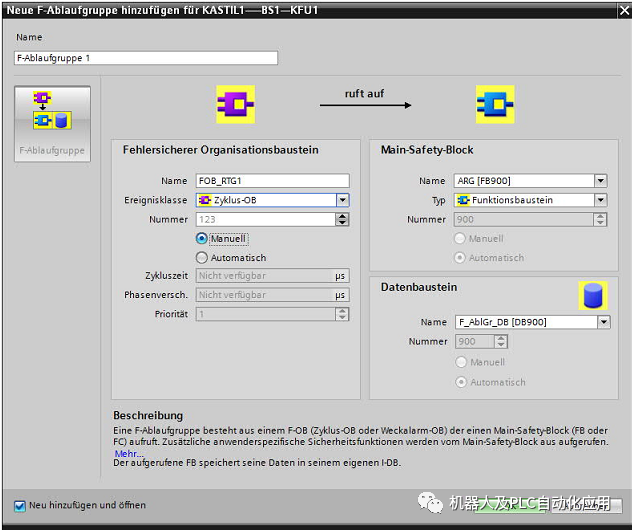
创建F运行组(1)

创建 F运行组(2)
F运行组的最大循环时间必须为 50(ms)
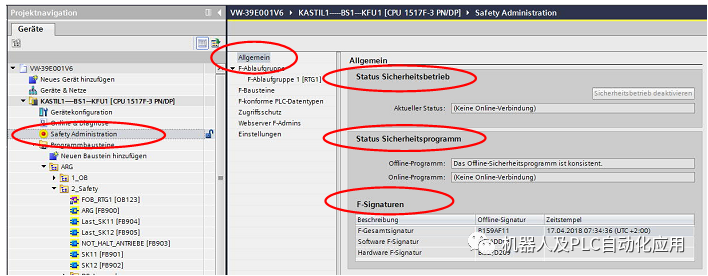
安全管理
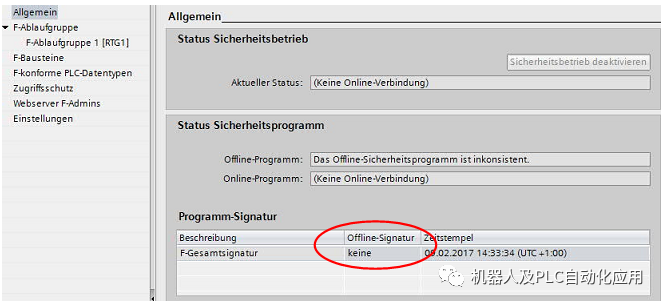
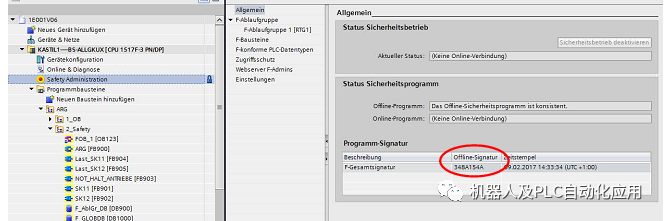
概述
双击鼠标以打开“安全管理”。
在“常规”选项卡中,可以看到“状态安全模式”,“状态安全程序”和“程序签名”
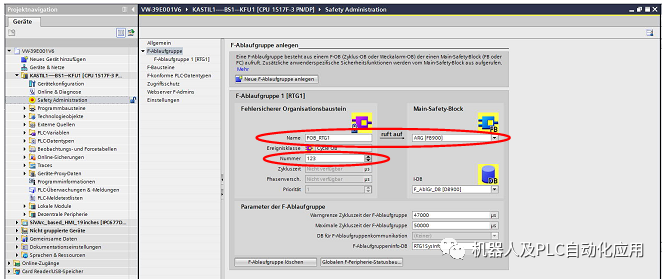
F运行组
在“常规à F-Runtime 组”下创建 F 运行组。
此处显示了 FB900 通过 OB123 的循环调用。
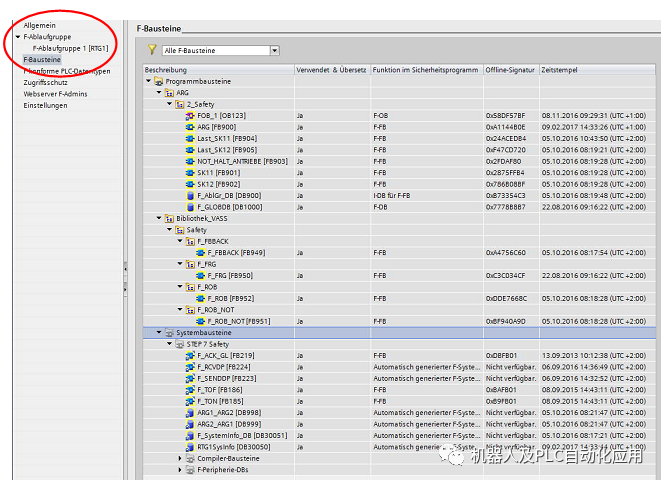
F函数块
此概述列出了项目的所有安全块。
可以查看并查看它们是否被使用。
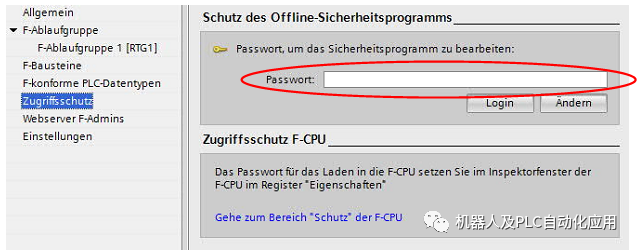
访问保护
为了能够编辑安全程序,必须在此处输入密码。密码“VWKB”
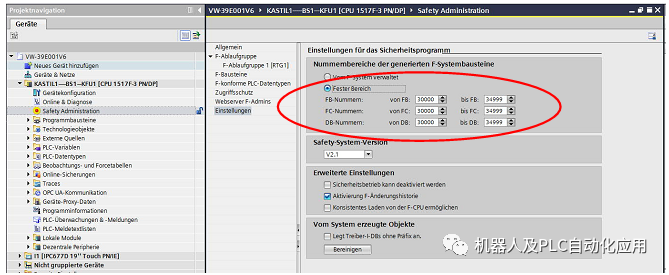
设置
F运行组的设置
在导航点“生成的 F 系统块的编号范围”中,必须选择“固定范围”,并且必须设置30000到 34999 的地址。
在导航点“安全系统版本”中选择“V2.1”。
在导航点“高级设置”中,必须选择“激活 F 更改历史记录”。
安全程序的生成
TIA Portal在硬件和软件之间只有一个分隔。
不再提供各种功能,例如块一致性检查和安全程序的生成。
如果安全模块或安全程序中的更改发生硬件更改,则在编译期间会自动生成签名。
处理安全相关部件(硬件或软件)后,不再有签名。
只需要编译已编辑的部分。
这是“软件(仅限更改)”,“硬件(仅更改)”或“硬件和软件(仅更改)”。
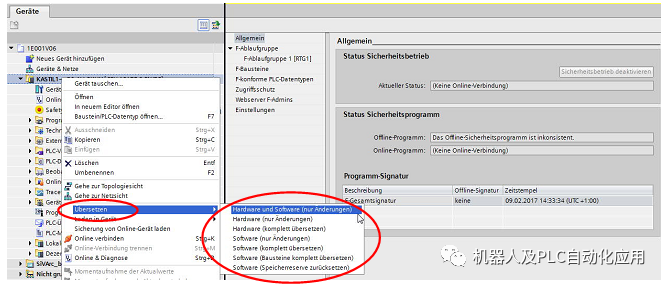
首选变体是编译“硬件和软件(仅限更改)”。
之后,再次显示离线签名。
原文标题:博途VASS06的CPU设置要求
文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
-
预期功能安全是什么?(上)2026-04-10 252
-
标准传输线的应用领域及范围2023-06-13 3885
-
大众VASS V6标准中文手册及PLC程序模板下载2023-04-27 13127
-
大众VASS06报警信息提示功能2023-01-05 2768
-
如何通过SOTIF标准解决智能驾驶开发中功能不足的问题2023-01-03 2736
-
VASS标准中FB122的功能2022-04-02 2559
-
关于博途VASS6的Profinet诊断2021-06-09 3730
-
S7安全门的控制与接线-VASS的控制2021-03-18 6792
-
西门子自动化标准有以下这些通用功能 你知道哪个?2021-03-17 8473
-
探究VASS的PLC顺序控制程序到底该如何使用2021-03-10 3043
-
关于自动驾驶预期功能安全风险评估方法的详解2021-01-27 3925
-
博途VASS06的CPU设置要求2020-12-23 5429
-
请问EZ BLE模块22200—500的预期视线范围是多少?2019-10-08 1306
全部0条评论

快来发表一下你的评论吧 !
