

Taskfile的安装及使用
描述
1. Taskfile 是什么
Taskfile 通过 yaml 来描述各种执行任务, 其核心采用 go 编写; 相较于 Makefile 的 tab 分割和 bash 结合语法 Taskfile 显得更加现代化和易于使用(虽然会变成 yaml 工程师). Taskfile 内置了动态变量、操作系统等环境变量识别等高级功能都更贴合现代化的 Coding 方式。
总体来说如果你是一个对 Makefile 不太熟悉的人, 又期望通过类似 Makefile 的工具完成一些批量任务, 那么相对于 Makefile 来说 Taskfile 会更加便于入门, 学习曲线更低且速度也足够快。
2. 安装及使用
安装 go-task
对于 mac 用户来说官方提供了 brew 安装方式:
$ brew install go-task/tap/go-task
对于 Linux 用户, 官方提供了部分 Linux 发行版的安装包, 但由于其只有一个二进制文件, 所以官方也提供了快速安装脚本:
# For Default Installation to ./bin with debug logging
$ sh -c "$(curl --location https://taskfile.dev/install.sh)" -- -d
# For Installation To /usr/local/bin for userwide access with debug logging
# May require sudo sh
$ sh -c "$(curl --location https://taskfile.dev/install.sh)" -- -d -b /usr/local/bin
如果本地已经有了 Go 语言开发环境也可以直接通过 go 命令安装:
$ go install github.com/go-task/task/v3/cmd/task@latest
快速开始
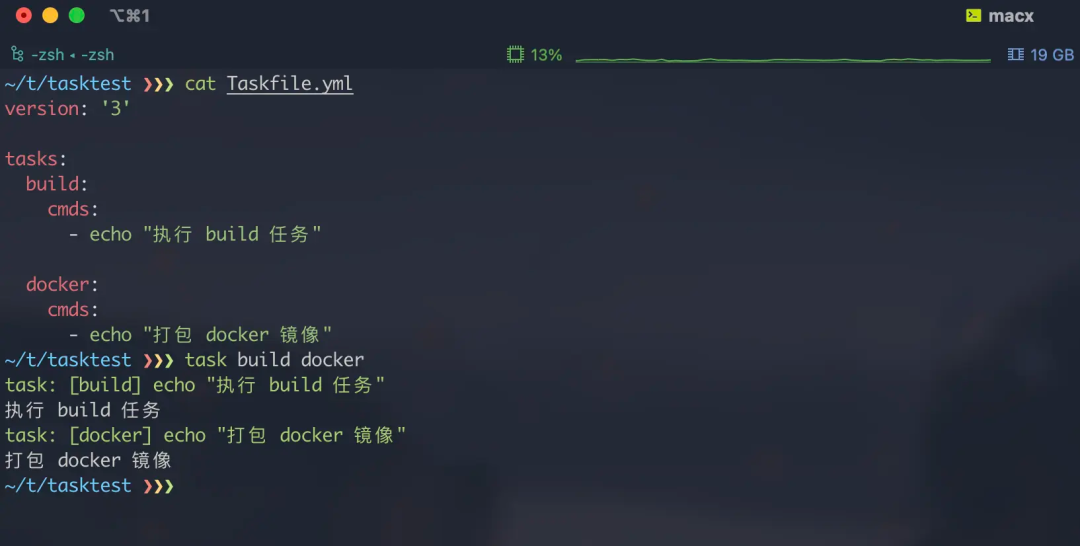
安装完成后, 只需要编写一个 Taskfile.yml 的 yaml 文件, 然后就可以通过 task 命令运行相应的任务:
version: '3'
tasks:
build:
cmds:
- echo "执行 build 任务"
docker:
cmds:
- echo "打包 docker 镜像"
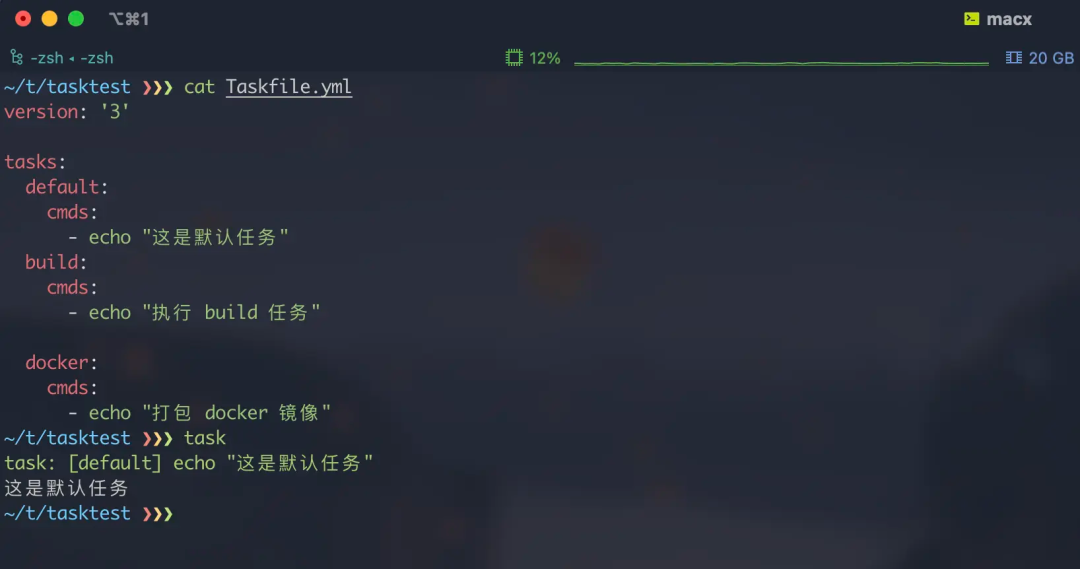
如果需要设置默认执行任务, 只需要创建一个名字为 default 的任务即可:
version: '3'
tasks:
default:
cmds:
- echo "这是默认任务"
build:
cmds:
- echo "执行 build 任务"
docker:
cmds:
- echo "打包 docker 镜像"
3. 进阶使用
环境变量
Taskfile 支持引用三种环境变量:
- Shell 环境变量
- Taskfile 内定义的环境变量
- 变量文件内定义的环境变量
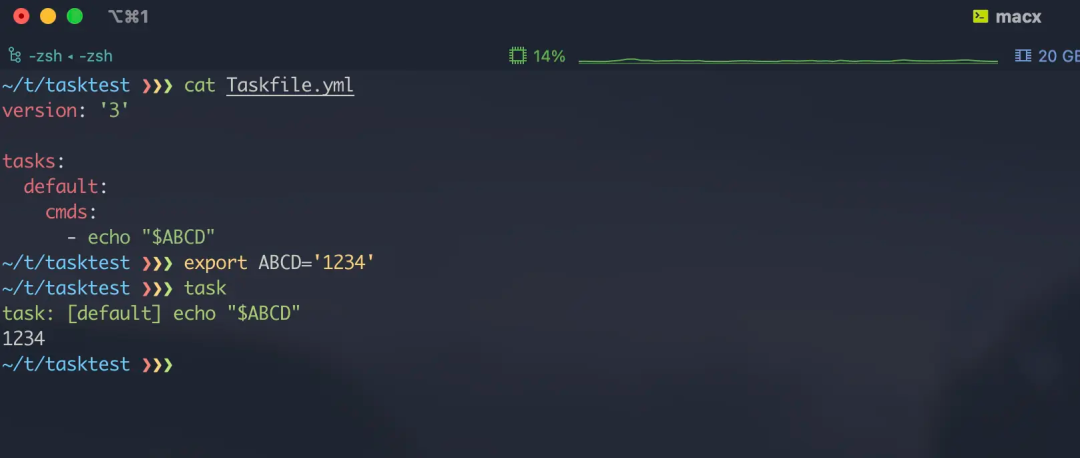
如果需要引用 Shell 内的环境变量只需要使用 $ 变量名 方式直接引用即可:
version: '3'
tasks:
default:
cmds:
- echo "$ABCD"
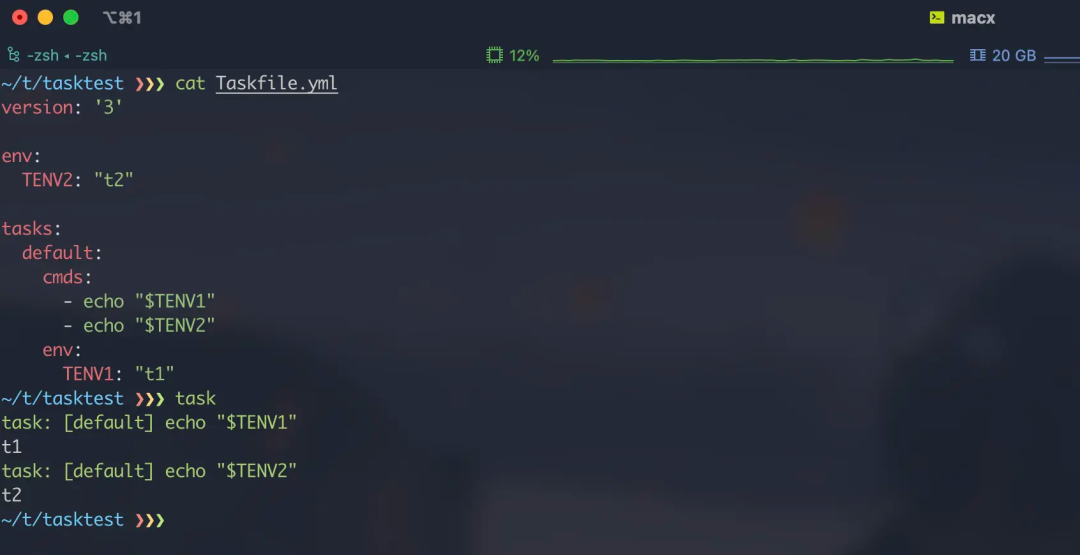
同样在 Taskfile 内也可以定义环境变量:
version: '3'
env:
TENV2: "t2" # 全局环境变量
tasks:
default:
cmds:
- echo "$TENV1"
- echo "$TENV2"
env:
TENV1: "t1" # 单个 task 环境变量
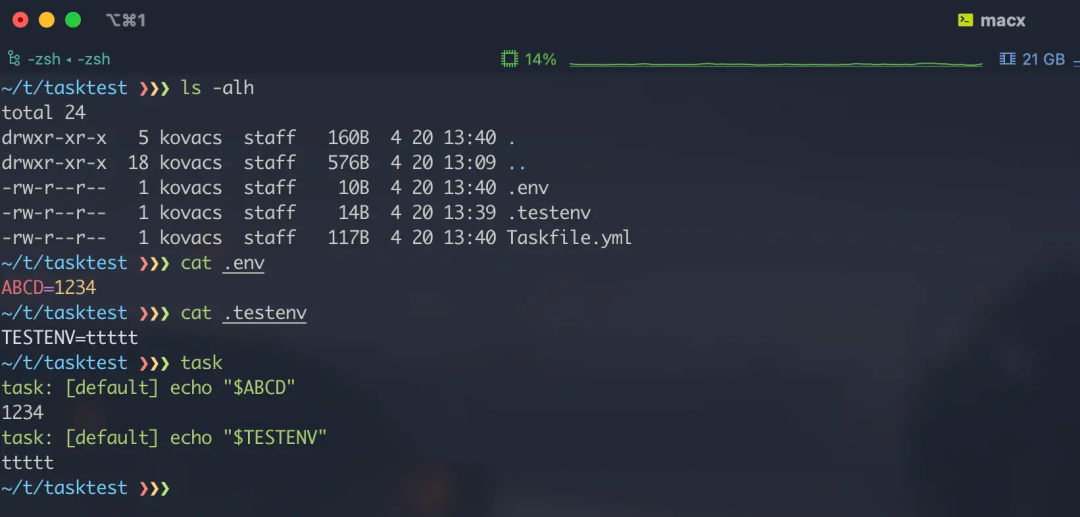
除了这种直接引用变量的方式, Taskfile 也支持类似 docker-compose 一样读取 env 文件来加载环境变量; Taskfile 会默认加载同级目录下的 .env 文件, 也可以在 Taskfile 内通过 dotenv 命令来配置特定文件:
version: '3'
dotenv: [".env", ".testenv"]
tasks:
default:
cmds:
- echo "$ABCD"
- echo "$TESTENV"
增强变量
除了标准的环境变量以外, 在 Taskfile 中还内置了一种使用更加广泛的增强变量 vars; 该变量模式可以通过 go 的模版引擎进行读取(插值引用), 且具有环境变量不具备的特殊特性. 以下为 vars 变量的示例:
version: '3'
# 全局 var 变量
vars:
GLOBAL_VAR: "global var"
tasks:
testvar:
# task var 变量
vars:
TASK_VAR: "task var"
cmds:
- "echo {{.GLOBAL_VAR}}"
- "echo {{.TASK_VAR}}"
除了上面与环境变量类似的使用以外, vars 增强变量还支持动态定义; 常见的场景, 比如我们想每次 task 执行时都获取当前的 git commit id, 此时可以使用 vars 的动态定义特性:
version: '3'
tasks:
build:
cmds:
- go build -ldflags="-X main.Version={{.GIT_COMMIT}}" main.go
vars:
# 每次任务执行时, GIT_COMMIT 都会调用 shell 命令来生成这个变量
GIT_COMMIT:
sh: git log -n 1 --format=%h
vars 变量还内置了一些特殊的预定义变量, 例如 {{.TASK}} 变量永远表示当前的任务名称、{{.CLI_ARGS}} 可以引用命令行输入等.
version: '3'
tasks:
yarn:
cmds:
- yarn {{.CLI_ARGS}}
此时如果执行 task yarn -- install, 那么 {{.CLI_ARGS}} 值将会变成 install 从而执行 yarn install 命令.
除此之外, vars 变量还具备一些其他特性, 比如跨任务引用时可进行覆盖传递等, 这些特性将会在后面介绍.
执行目录
Taskfile 内定义的 task 默认在当前目录下执行, 如果期望在其他目录执行, 无需手动编写 cd 等命令, 可以直接通过配置 dir 参数来设置执行目录:
version: '3'
tasks:
test1:
dir: /tmp # 在指定目录执行
cmds:
- "ls"
任务依赖
在 CI 等环境的使用中, 我们常常需要定义任务的执行顺序和依赖关系; Taskfile 中通过 deps 配置来提供任务依赖关系的支持:
version: '3'
tasks:
build-jar:
cmds:
- echo "编译 jar 包..."
build-static:
cmds:
- echo "编译前端 UI..."
build-docker:
deps: [build-jar, build-static]
cmds:
- echo "打包 docker 镜像..."
任务调用
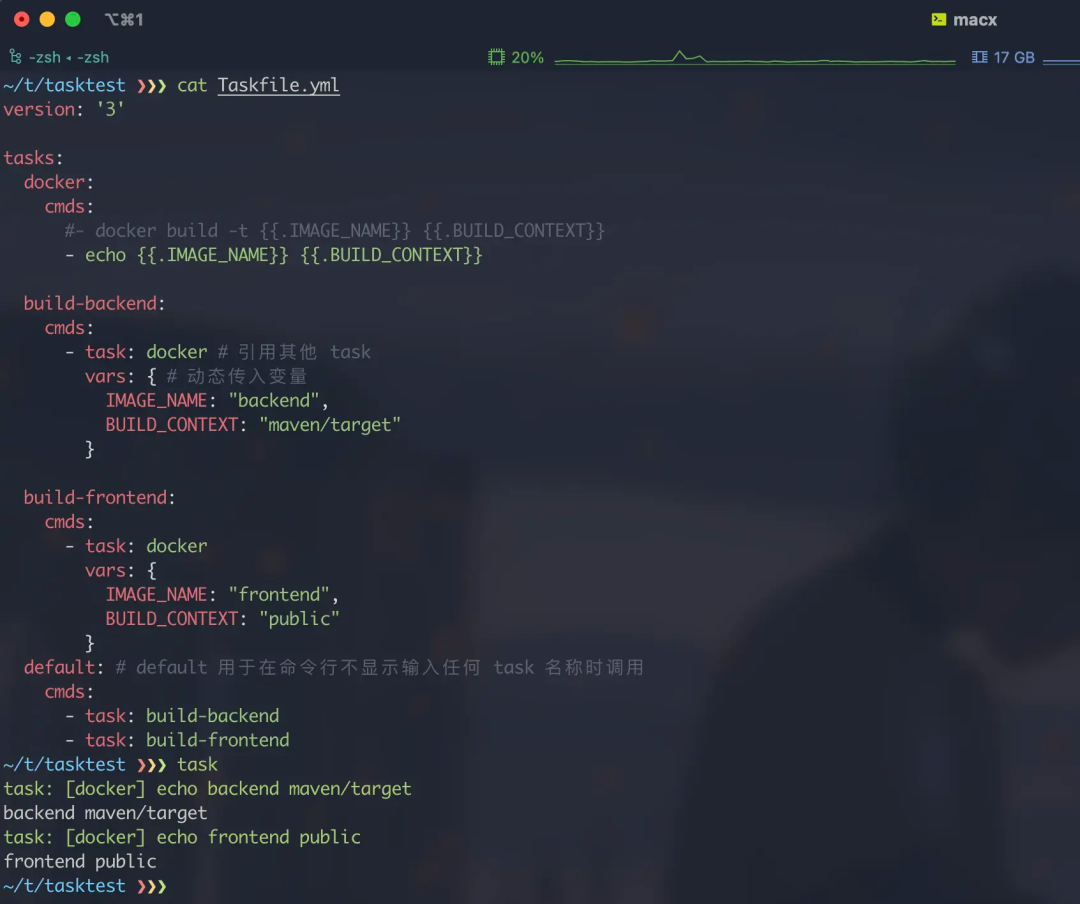
当我们在 Taskfile 中定义了多个任务时, 很可能一些任务具有一定的相似性, 此时我们可以通过任务互相调用和 vars 变量动态覆盖的方式来定义模版 Task:
version: '3'
tasks:
docker:
cmds:
#- docker build -t {{.IMAGE_NAME}} {{.BUILD_CONTEXT}}
- echo {{.IMAGE_NAME}} {{.BUILD_CONTEXT}}
build-backend:
cmds:
- task: docker # 引用其他 task
vars: { # 动态传入变量
IMAGE_NAME: "backend",
BUILD_CONTEXT: "maven/target"
}
build-frontend:
cmds:
- task: docker
vars: {
IMAGE_NAME: "frontend",
BUILD_CONTEXT: "public"
}
default: # default 用于在命令行不显示输入任何 task 名称时调用
cmds:
- task: build-backend
- task: build-frontend
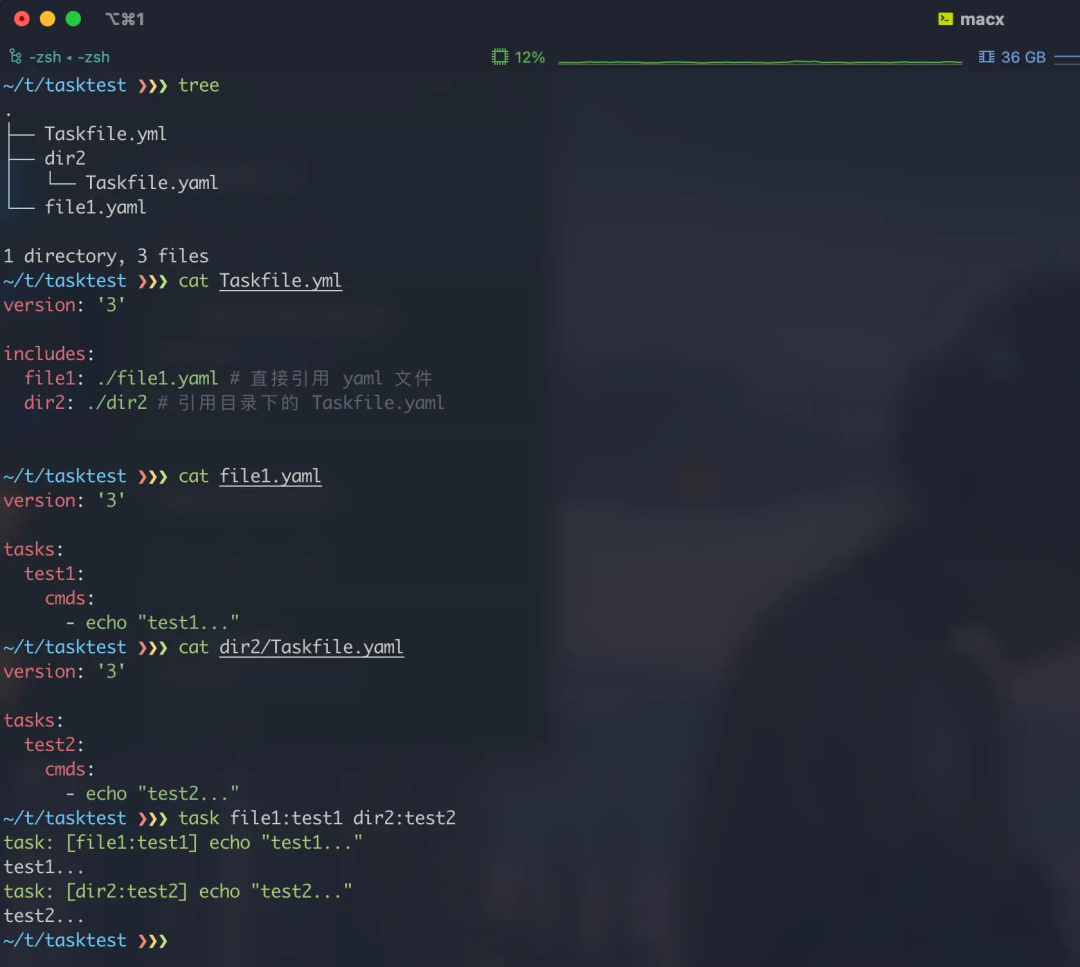
引入其他文件
Taskfile 支持通过 includes 关键字来引入其他 Taskfile, 从而方便 Taskfile 的结构化处理.
需要注意的是, 由于引入的文件中可能会包含多特 task, 所以在使用时需要对引入的文件进行命名, 且通过命名引用目标 task:
version: '3'
includes:
file1: ./file1.yaml # 直接引用 yaml 文件
dir2: ./dir2 # 引用目录时默认引用该目录下的 Taskfile.yaml
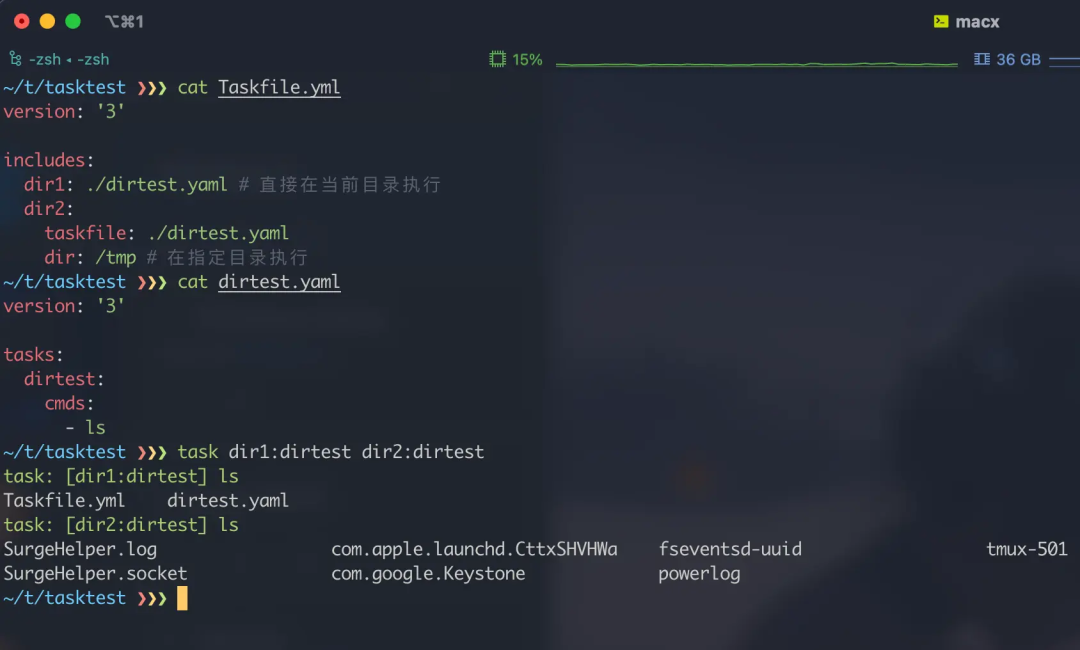
在引入其他 Taskfile 时, 默认情况下会在当前主 Taskfile 目录下执行命令, 我们同样可以通过 dir 参数来控制引入的 Taskfile 内的 task 在特定目录下执行:
version: '3'
includes:
dir1: ./dirtest.yaml # 直接在当前目录执行
dir2:
taskfile: ./dirtest.yaml
dir: /tmp # 在指定目录执行
defer 处理
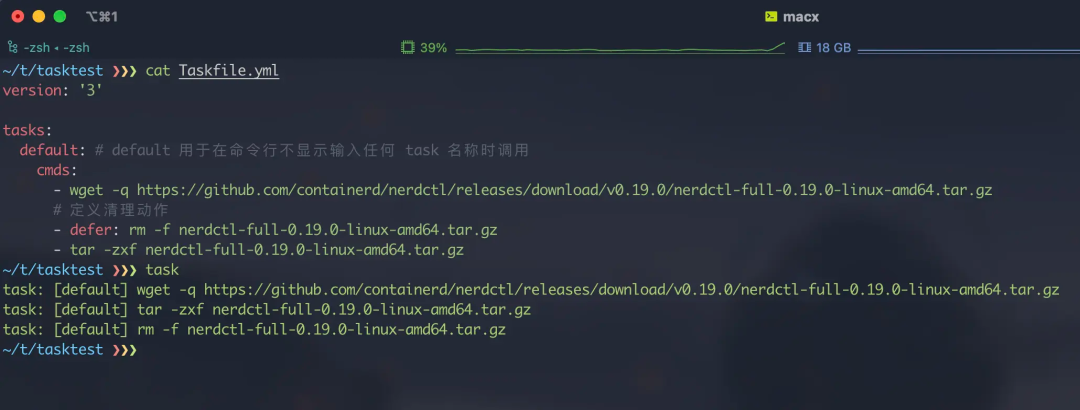
熟悉 go 语言的同学应该知道, go 里面有个很方便的关键字 defer; 该指令用于定义在最终代码收尾时要执行的动作, 常见的比如资源清理等. Taskfile 中同样支持了该指令, 可以方便我们在任务执行期间完成一些清理操作:
version: '3'
tasks:
default: # default 用于在命令行不显示输入任何 task 名称时调用
cmds:
- wget -q https://github.com/containerd/nerdctl/releases/download/v0.19.0/nerdctl-full-0.19.0-linux-amd64.tar.gz
# 定义清理动作
- defer: rm -f nerdctl-full-0.19.0-linux-amd64.tar.gz
- tar -zxf nerdctl-full-0.19.0-linux-amd64.tar.gz
当然, defer 指令除了直接写命令以外, 还可以引用其他 task 完成清理:
version: '3'
tasks:
cleanup:
cmds:
- rm -f {{.FILE}}
default: # default 用于在命令行不显示输入任何 task 名称时调用
cmds:
- wget -q https://github.com/containerd/nerdctl/releases/download/v0.19.0/nerdctl-full-0.19.0-linux-amd64.tar.gz
# 引用其他 task 进行清理, 同时也可以传递动态变量
- defer: {task: cleanup, vars: {FILE: nerdctl-full-0.19.0-linux-amd64.tar.gz}}
- tar -zxf nerdctl-full-0.19.0-linux-amd64.tar.gz
4. 高级应用
动态检测
输出检测
在某些时候, 一些任务我们可能期望进行缓存处理, 比如说已经下载好了文件就不要重复运行下载; 针对于这种需求, Taskfile 允许我们定义源文件和生成的文件, 通过这组文件的 hash 值来确定是否需要执行该任务:
version: '3'
tasks:
default:
cmds:
- wget -q https://github.com/containerd/nerdctl/releases/download/v0.19.0/nerdctl-full-0.19.0-linux-amd64.tar.gz
sources:
- testfile
generates:
- nerdctl-full-0.19.0-linux-amd64.tar.gz
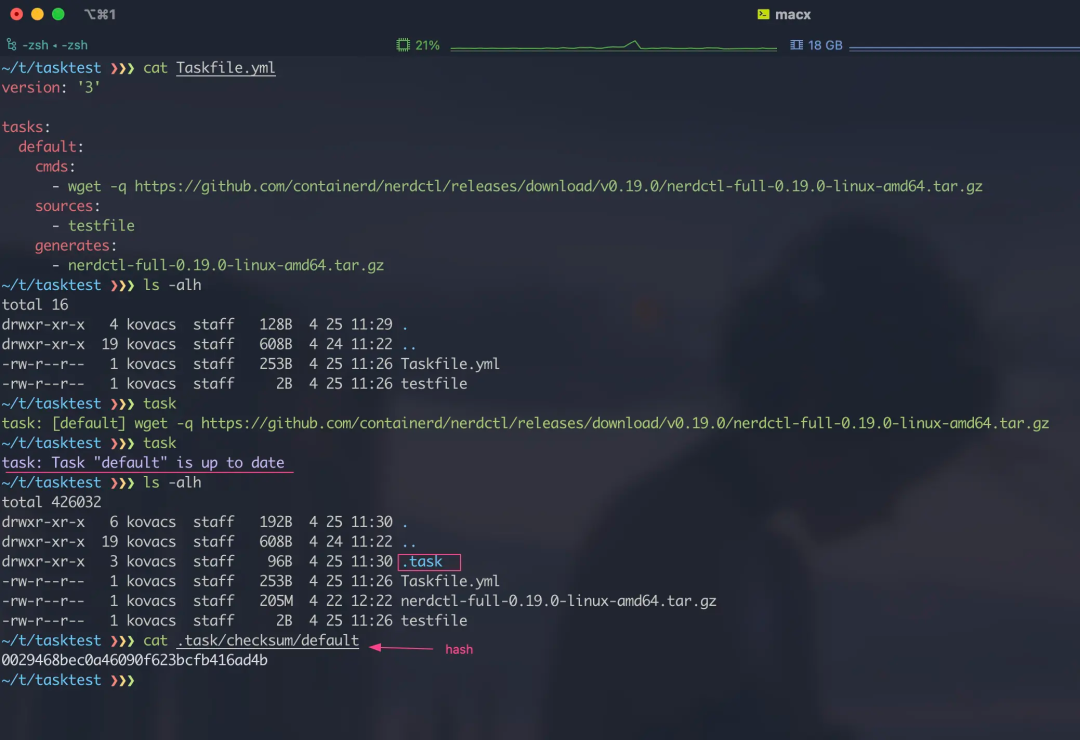
从上图中可以看到, 当首次执行任务时会生成 .task 目录, 该目录包含文件的 hash 值; 当重复执行任务时, 如果 hash 值不改变则真实任务不会真正执行. Taskfile 默认有两种文件检测的方式: checksum、timestamp, checksum 执行文件的 hash 检测(默认), 该模式只需要定义 sources 配置; timestamp 执行文件的时间戳检测, 该模式需要同时定义 sources 和 generates 配置.
version: '3'
tasks:
build:
cmds:
- go build .
sources:
- ./*.go
generates:
- app{{exeExt}}
method: checksum # 指定检测方式
除了内置的两种检测模式外, 我们还可以通过 status 配置来定义自己的检测命令, 如果命令执行结果为 0, 则认为文件是最新的, 不需要执行任务:
version: '3'
tasks:
generate-files:
cmds:
- mkdir directory
- touch directory/file1.txt
- touch directory/file2.txt
# test existence of files
status:
- test -d directory
- test -f directory/file1.txt
- test -f directory/file2.txt
输入检测
上面的输出检测用于检测任务生成的文件结果等, 在某些情况下我们可能期望在运行任务之前来判断某个条件, 在完全不执行的情况下确定任务是否需要运行; 此时我们可以使用 preconditions 配置指令:
version: '3'
tasks:
generate-files:
cmds:
- mkdir directory
- touch directory/file1.txt
- touch directory/file2.txt
# test existence of files
preconditions:
- test -f .env
- sh: "[ 1 = 0 ]"
msg: "One doesn't equal Zero, Halting"
Go 模版引擎
在上面变量环节中已经展示了一部分模版引擎的使用, 实际上 Taskfile 内集成了 slim-sprig[1] 库, 该库中提供了一些比较便利的方法, 这些方法都可以在模版引擎内使用:
version: '3'
tasks:
print-date:
cmds:
- echo {{now | date "2006-01-02"}}
关于这些方法和模版引擎的使用具体请参考 Go Template 相关文档以及 slim-sprig[2] 文档.
交互式终端
有些任务命令可能需要交互式终端来执行, 此时可以为 task 设置 interactive 选项; 当 interactive 设置为 true 时, task 在运行时可以打开交互式终端:
version: '3'
tasks:
cmds:
- vim my-file.txt
interactive: true
更多关于 Taskfile 的细节使用请阅读其官方文档[3], 本文限于篇幅不在过多阐述。
审核编辑:汤梓红
-
安装Linux的系统安装工具2023-09-11 656
-
openeuler安装教程二:openeuler安装方式介绍2022-12-06 6205
-
OpenSSL安装使用:OpenSSL安装说明2022-11-11 2743
-
Kali Linux安装Java 安装显卡驱动 安装网卡补丁 并发线程限制 电源优化2022-01-06 769
-
指纹锁安装注意事项及安装步骤2020-06-13 13138
-
QuartusII安装教程之QuartusII安装说明和硬件安装资料免费下载2019-03-27 1511
-
RealViewMDK的安装概述和驱动安装2018-05-09 1340
-
PLC的安装准备和安装商检、调试、检查2017-12-25 3506
-
led吸顶灯如何安装(安装教程)_led吸顶灯安装图解2017-12-22 328051
-
PIII 的安装2010-01-12 828
-
轴承的安装2009-05-14 1266
-
pads2007的安装方法 怎么安装 无法安装2007-12-03 9327
-
pads2005安装方法 安装说明 安装步骤2007-11-28 2087
全部0条评论

快来发表一下你的评论吧 !
