

AXI_GPIO简介与使用指南
描述
学习内容
前面简单学习了关于GPIO的操作,本次将使用PL 端调用 AXI GPIO IP 核, 并通过 AXI4-Lite 接口实现 PS 与 PL 中 AXI GPIO 模块的通信。
开发环境
vivado 18.3SDKPYNQ-Z2
AXI_GPIO简介
AXI GPIO IP 核为 AXI 接口提供了一个通用的输入/输出接口。与 PS 端的 GPIO 不同, AXI GPIO 是一个软核( Soft IP),即 ZYNQ 芯片在出厂时并不存在这样的一个硬件电路, 而是由用户通过配置 PL 端的逻辑资源来实现的一个功能模块。而 PS 端的 GPIO 是一个硬核( Hard IP) ,它是一个生产时在硅片中实现的功能电路。我们之前驱动的MIO接口,他属于PS端口的一个搭载好的硬件资源,而对于AXI_GPIO这样一个IP核来说他就相当于与在PL的逻辑端口实现了一个软核IP的GPIO接口。AXI 接口作为 ZYNQ PS 和 PL 之间的桥梁, 能够使两者协同工作,进而形成一个完整的、 高度集成的系统。AXI GPIO 可以配置成单通道或者双通道, 每个通道的位宽可以单独设置。另外通过打开或者关闭三态缓冲器, AXI GPIO 的端口还可以被动态地配置成输入或者输出接口。其顶层模块的框图如下所示: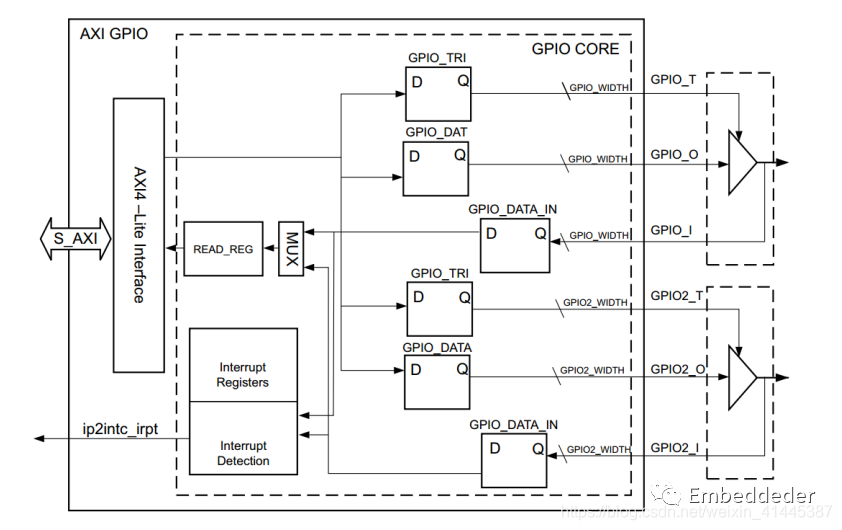
模块的左侧实现了一个 32 位的 AXI4-Lite 从接口, 用于主机访问 AXI GPIO 内部各通道的寄存器。当右侧接口输入的信号发生变化时,模块还能向主机产生中断信号。不过只有在配置 IP核时选择“ 使能中断” , 才会启用模块的中断控制功能。
我们可以在xilinx的一个说明书(UG144)中详细的看到关于AXI_GPIO IP的具体的寄存器,对于不同功能的配置我们只需要像在ARM开发中进行寄存器的配置即可,但寄存器的操作过于繁琐,在一般的开发过程中我们通常进行的都是库函数的使用调用。
在文档中我们可以看到IP的以下特点,基本包含了硬件GPIO的所有功能。设置输入输出模式,设置中断等。
引脚说明表如下,在这个表中,大致分为了两类,第一类s_axi接口的相关引脚,用于配置挂载到AXI总线,s_axi_*这是一组信号接口,用于进行数据的交互和配置;第二类是和GPIO有关的信号接口,这里的IP中有两组gpio,每组输出三个信号经过一个三态缓存器实现三态输出。为了实现中断功能,这里的ip2intc_irpt是中断的敏感信号。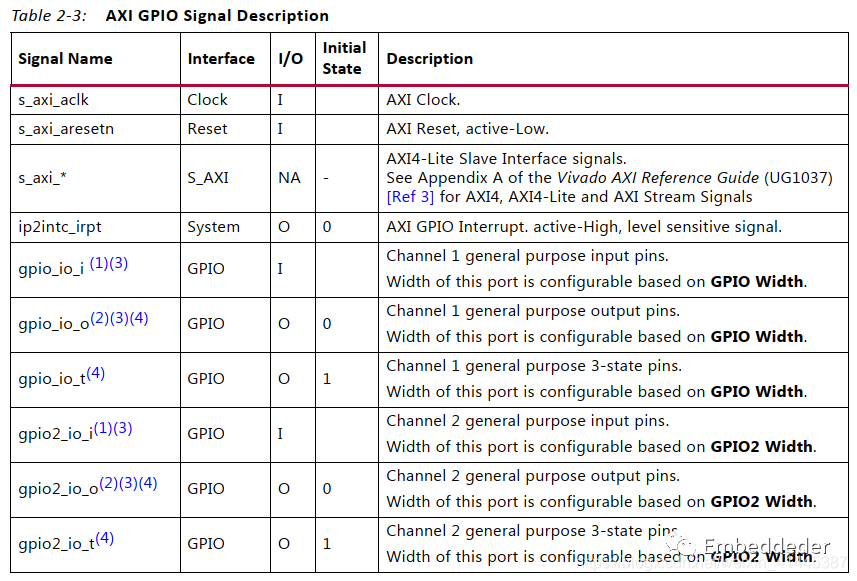
编程指南
同样在UG144中我们可以找到对于AXI_GPIO IP在应用开发的时候的一个编程指南
设置带中断的INPUT
- 将端口配置为输入,将相应的位写入GPIOx_TRI寄存器,值为1。
- 通过设置IP中断使能中相应的位使能通道中断注册;也可以通过设置全局中断的第31位来启用全局中断注册为1。
- 当接收到中断时,读取GPIOx_DATA寄存器中相应的位。通过写入值为1的对应位来清除IP中断状态寄存器中的状态。
这里的编程指南描述的是寄存器的配置流程,在我们的实际应用中简单来说就是调用库函数配置端口为输入,然后进行中断功能的注册(类似前文的GPIO的按键中断)。
配置为普通的INPUT
- 将端口配置为输入,将相应的位写入GPIOx_TRI寄存器,值为1。
- 读取GPIOx_DATA寄存器中相应的位。
配置为普通的OUTPUT
- 通过在GPIOx_TRI寄存器中写入值为0的对应位,将端口配置为输出。
- 将相应的位写入GPIOx_DATA寄存器。
工程系统框图
实现功能为使用EMIO的引脚驱动LED,使用AXI_GPIO的IP进行按键控制,当我们按键按下时,我们的LED进行一次反转。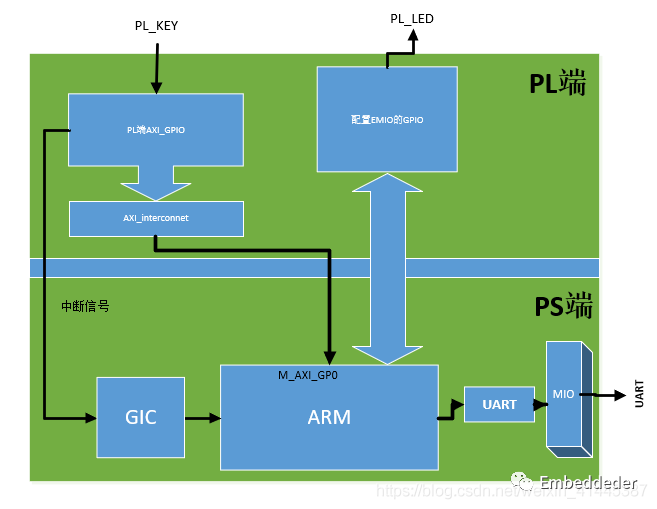
硬件平台搭建
同样重复前面的步骤,打开vivado工具的block design 添加ZYNQ的IP核,完成基础配置。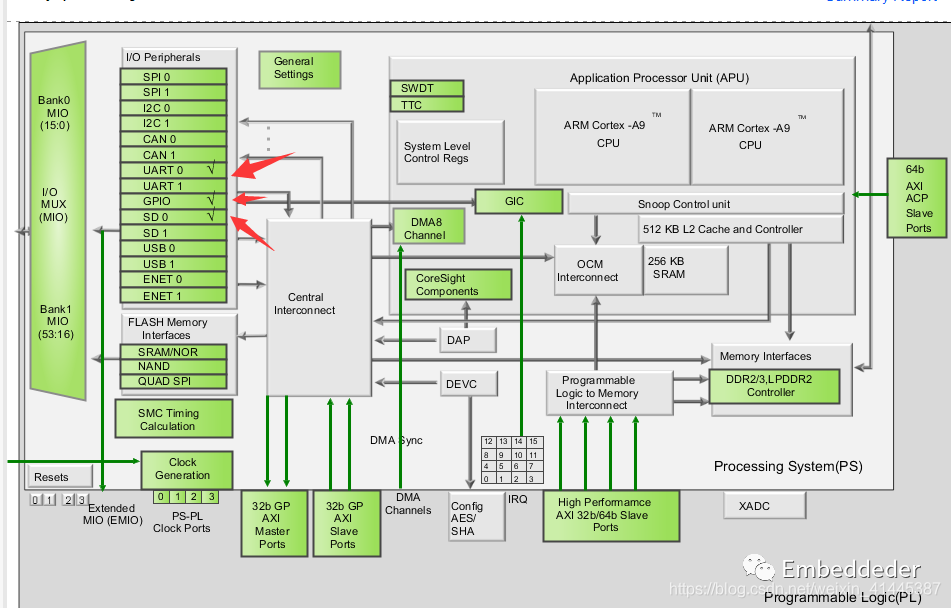
然后打开MIO configuration,对EMIO引脚的LED进行配置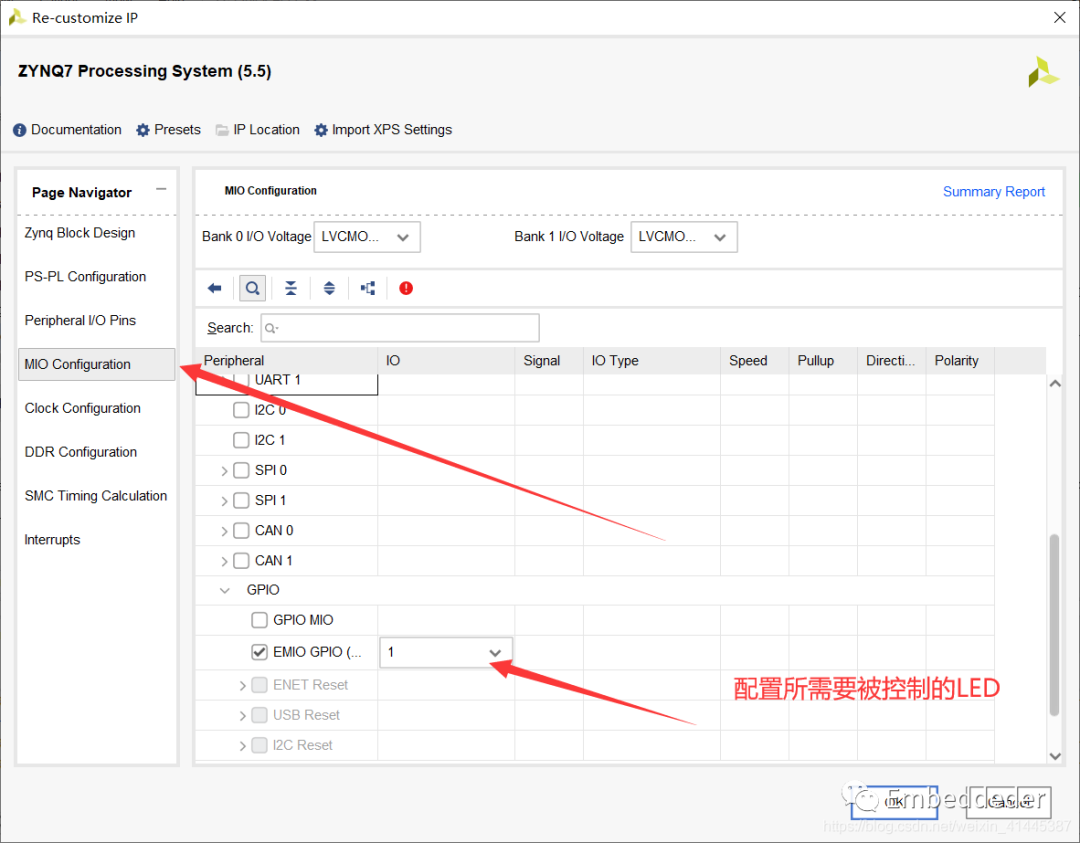
因为这里我们要使用AXI_GPIO的中断功能,所以我们打开中断界面进行配置,开启中断后,勾选PL到PS的中断功能。这里的中断标号有16个,对应原则是[15:0]对应的是[91:84]:[68:61],这里我们只使用了一个中断,所以我们的中断标号是61。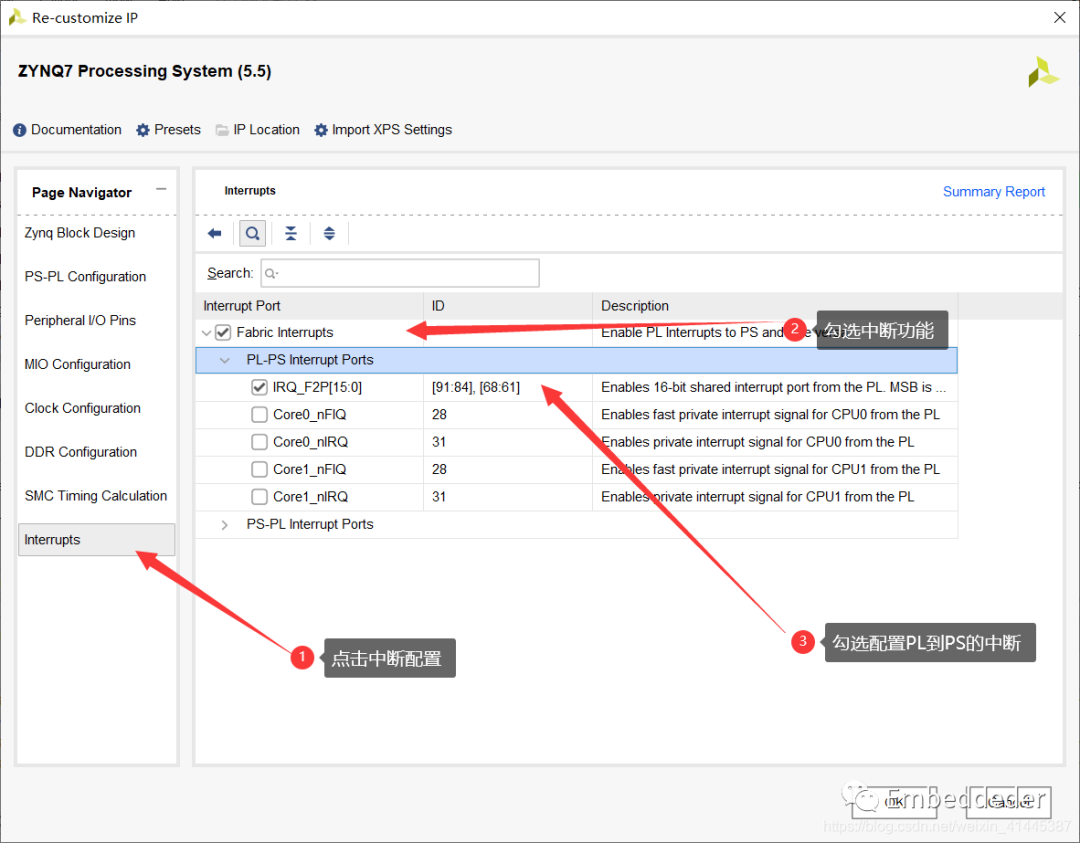
配置完成后添加AXI_GPIO的IP核。配置使能中断,GPIO的位宽选择为1即可。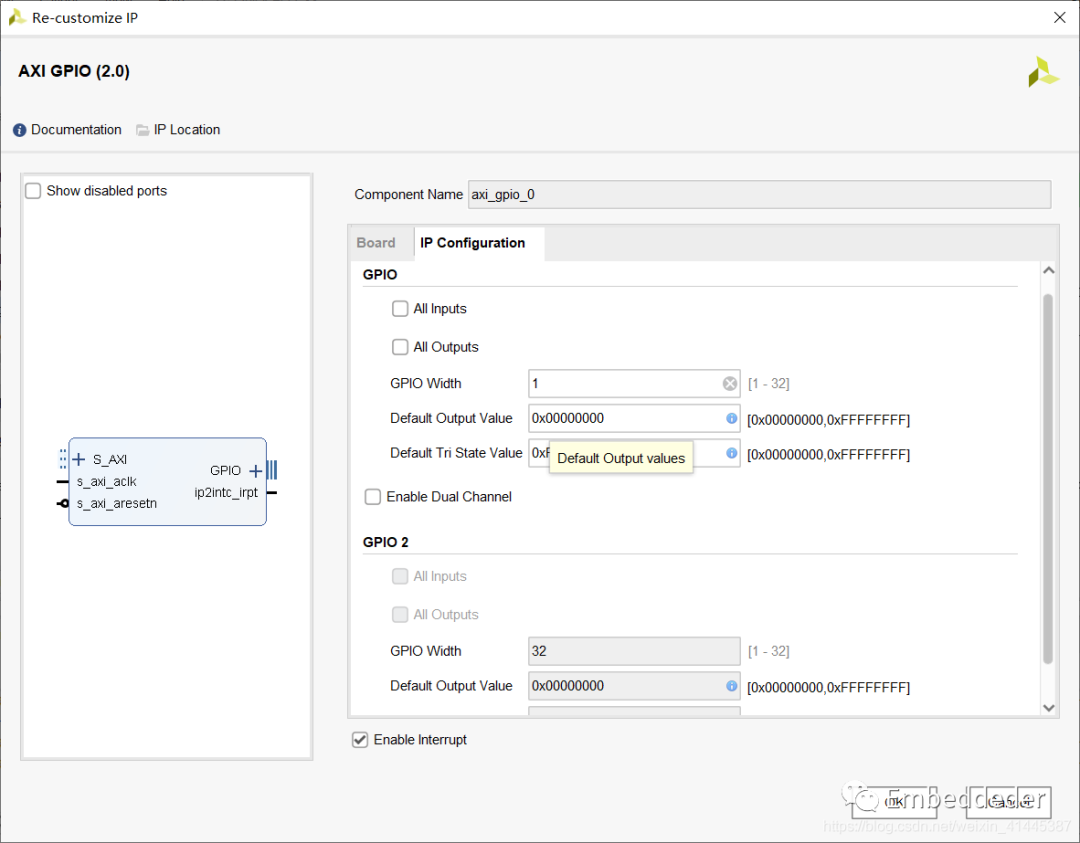
完成配置后得到下图点击运行自动连接,可以进行帮助我们进行对应端口的自动连接: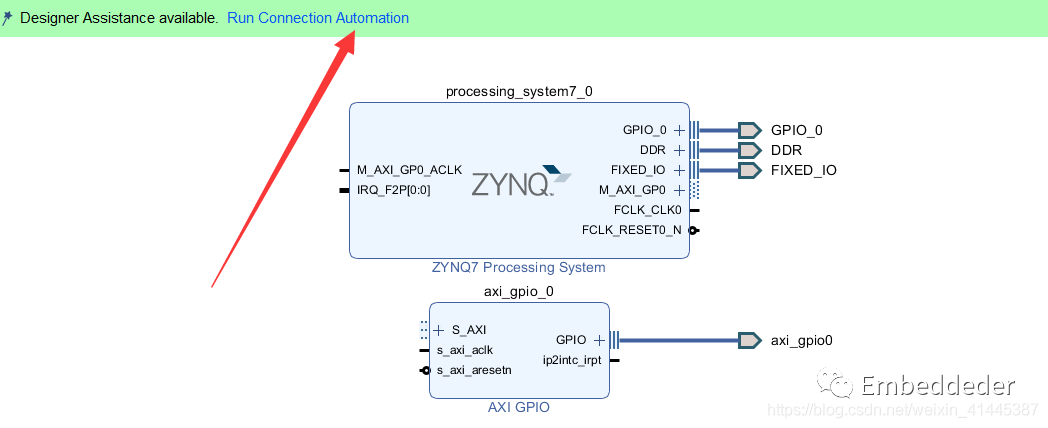 自动连接完成后如图所示:
自动连接完成后如图所示: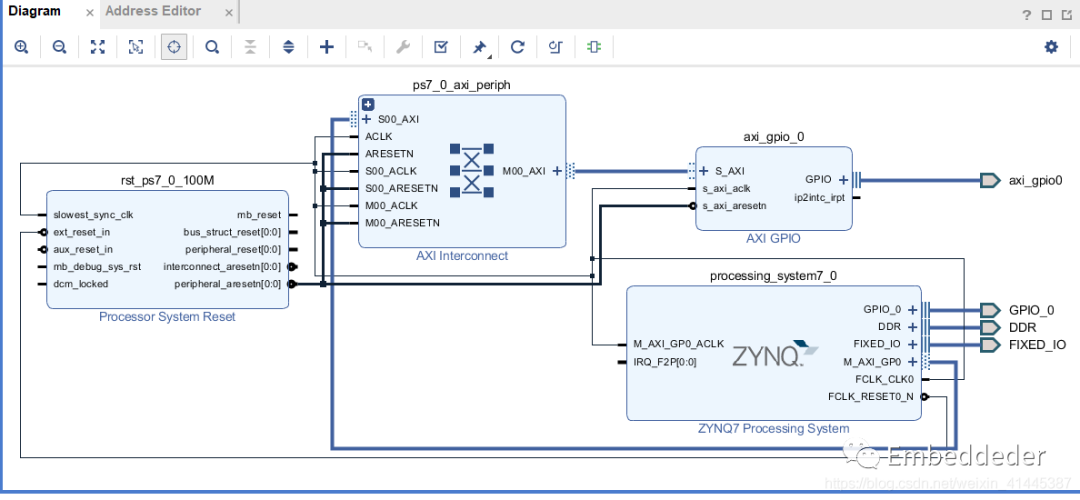
这里工具帮助我们完成了大部分的连接,但是没有帮助我们进行中断功能的连线,我们需要手动进行连接。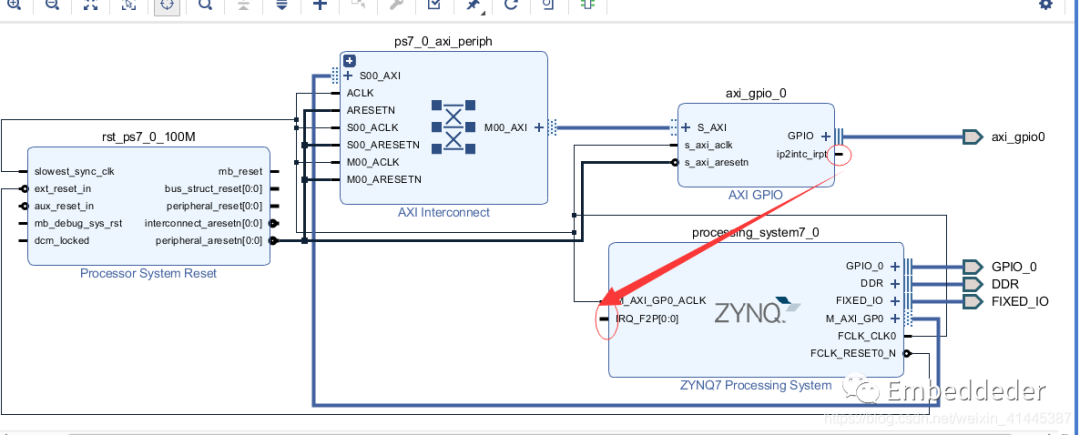
手动连接完成: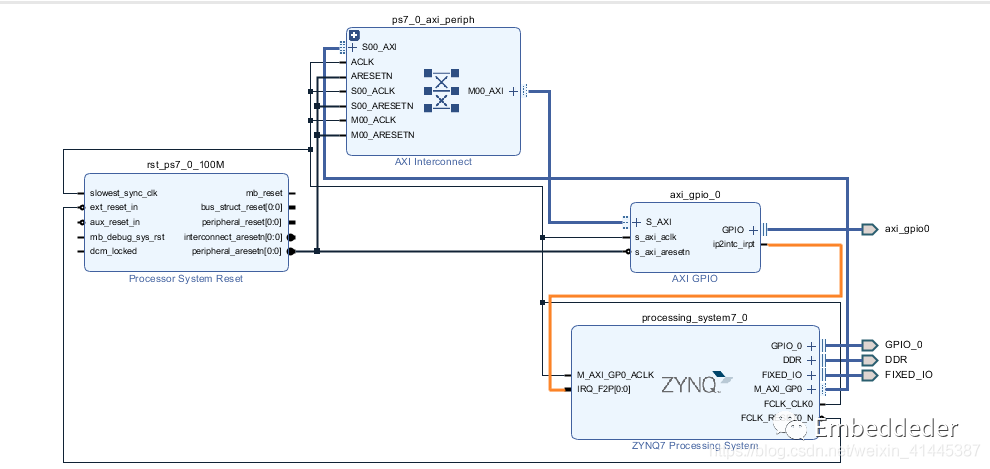
完成设计后,我们进行generate output product 然后生成HDL封装。接着就对应引脚进行引脚约束即可(PYNQ的粉色开发板可以直接引用这个约束):
set_property -dict { PACKAGE_PIN R14 IOSTANDARD LVCMOS33 } [get_ports { GPIO_0_tri_io[0] }]; #IO_L6N_T0_VREF_34 Sch=led[0]
set_property -dict { PACKAGE_PIN D19 IOSTANDARD LVCMOS33 } [get_ports { axi_gpio0_tri_io[0] }]; #IO_L4P_T0_35 Sch=btn[0]
完成约束后进行综合布局布线,等待生成bit流文件。bit文件生成后在FILE处,点击导出硬件资源(包含bit流文件),接着launch SDK。
软件部分编写
这里引用的AXI GPIO的资源对应的是gpio的部分,配置相应的功能函数可以参考相应的文件和对应的例程。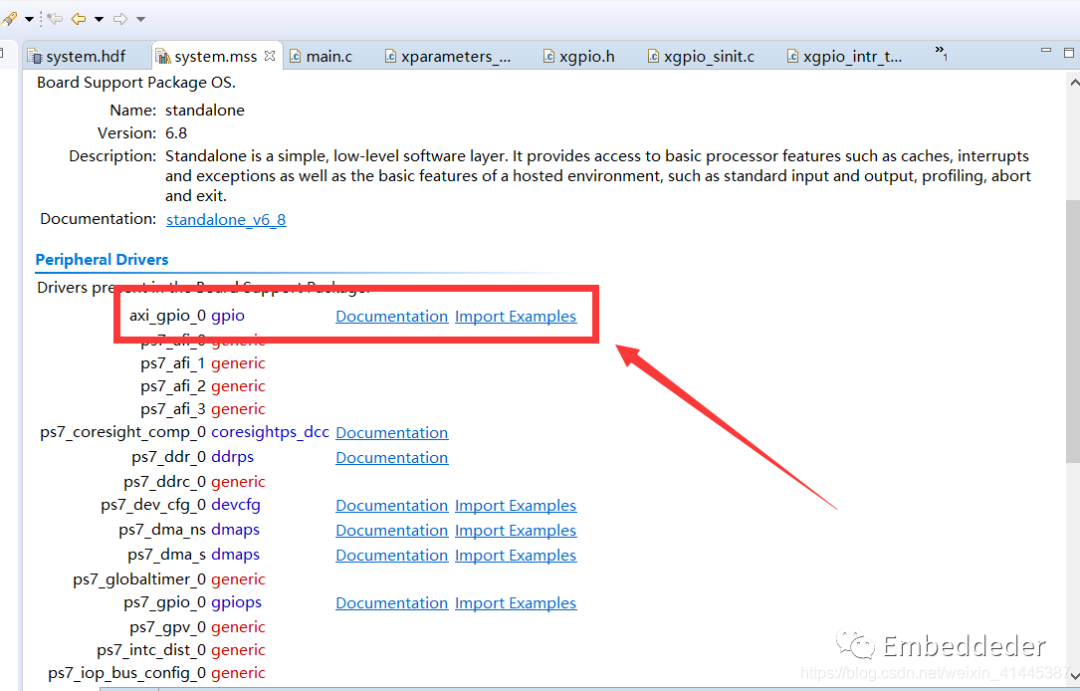
首先给出我本次的工程代码,在后面进行简要的说明:
#include
部分代码讲解
代码很类似上次的GPIO的中断功能的代码,这里只是更改了部分函数对axi gpio的ip进行ip的配置,实现带中断的输入功能的KEY。axi的初始化只需要一行代码即可完成,然后根据编程指南设置下方向即可完成输入的配置XGpio_Initialize(&axi_Gpio,AXI_GPIO_ID);//对PL端的gpio进行初始化XGpio_SetDataDirection(&axi_Gpio,AXI_GPIO_CHANNEL,0x0000001);//对AXI设置方向设置为输入对于这里的AXI_GPIO中断的标号就是我们前面提到的61,在这里我们可以进行define一下,方便我们进行引用。#define AXI_GPIO_INTR_ID XPAR_FABRIC_GPIO_0_VEC_ID//axi gpio的中断号在SDK中寻一下这个参数的数据也可以验证我们的标号数值: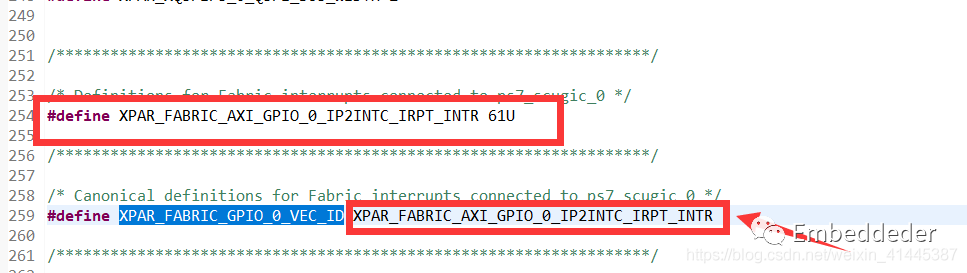
对于axi _gpio,我们配置的时候可以看到,每个IP核有两路GPIO,这里我们只用了通道1,所以我们的通道编号定义为1 #define AXI_GPIO_CHANNEL 1//axi gpio通道1在配置axi gpio的中断功能时,用的了XScuGic_SetPriorityTriggerType(&gpio_gic,AXI_GPIO_INTR_ID,0xA0, 0x3);在寻到该函数定义时候,可以简要了解下参数的配置功能。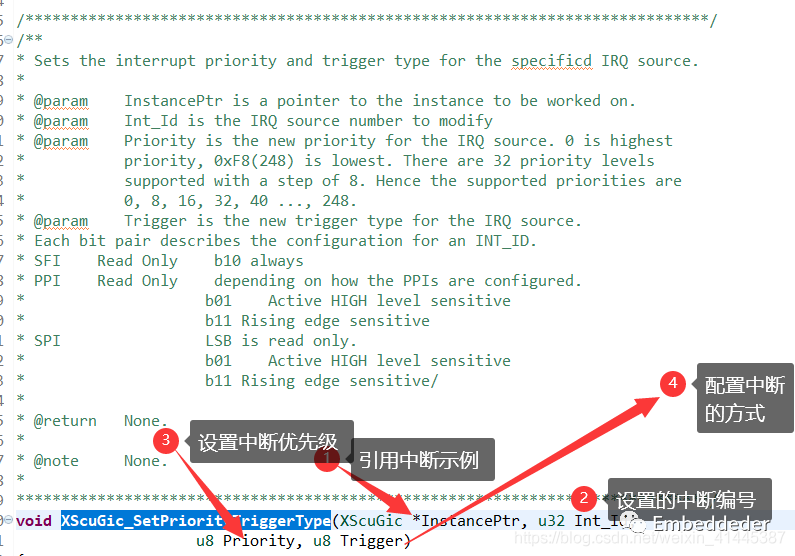
0xa0配置了中断优先级,这里我们不进行中断优先级的配置,所以引用的是示例里面的默认值,中断编号就是我们AXI GPIO的编号,0x03这个值用于配置中断的方式。这里我们的中断有高电平触发和边沿触发模式。我们设置边沿触发后,在我们按下按键会满足两次边沿触发的条件(这里我感觉注释和实际操作不相符),然后回看我们的编程指南,在中断配置时候是也是要求我们:当接收到中断时,读取GPIOx_DATA寄存器中相应的位。通过写入值为1的对应位来清除IP中断状态寄存器中的状态。所以我们就引用了XGpio_DiscreteRead(&axi_Gpio, AXI_GPIO_CHANNEL) 对中断的状态进行读取。对应编程指南代码编写如下:
//清除中断状态
if(XGpio_DiscreteRead(&axi_Gpio, AXI_GPIO_CHANNEL)==1){
led_status=~led_status;
}
XGpio_InterruptClear(&axi_Gpio, 0x0000001);
完成代码编写后下载到我们的PYNQ的开发板即可完成本次实验。
-
ARM+FPGA开发:基于AXI总线的GPIO IP创建2020-12-25 7136
-
Xilinx ZYNQ开发GPIO的三种方式:MIO、EMIO、AXI_GPIO2020-12-26 5696
-
AXI GPIO扩展e203 IO口简介2025-10-22 308
-
将e203 例化AXI总线接口2025-10-29 252
-
在GPIO2接口上添加三态GPIO端口时会导致错误2019-04-19 1736
-
MIO/EMIO/AXI_GPIO接口详解2021-02-02 4538
-
PWM使用指南2021-08-09 1341
-
HPM6700/6400系列微控制器GPIO模块使用指南2023-06-02 1398
-
学习架构-AMBA AXI简介2023-08-09 1072
-
AT32F421 GPIO使用指南2023-10-24 734
-
AT32F413/415 GPIO使用指南2023-10-25 1031
-
ZYNQ 的三种GPIO :MIO、EMIO、AXI2017-02-08 3825
-
被zynq的GPIO唬住,告诉你zynq的3种GPIO2018-07-07 5972
-
ZYNQ-7000系列MIO、EMIO、AXI_GPIO接口2022-07-25 3784
-
ZYNQ-7000系列MIO/EMIO/AXI_GPIO接口2021-01-31 1914
全部0条评论

快来发表一下你的评论吧 !
