

拆解|手持云台的内部构造竟那么简单
描述
电子发烧友网报道(文/李诚)随着互联网技术的发展,短视频行业得以快速兴起,并掀起了全民皆是创作者的短视频创作热潮。作为画面防抖、简化运镜难度的手持云台,也在浪潮中乘风而起,成为了这一赛道上的新亮点。

近日,笔者拿到了一款型号为浩瀚X的手持云台,在使用体验一段时间后,对其进行了拆解和工作原理分析。
云台三轴拆解
此款云台采用了可折叠式的三轴防抖设计,每一轴内都有与之轴向功能对应的电路板以及驱动云台旋转的电机,握杆部分主要为云台的转向控制单元、电池充放电管理单元和无线通信单元。
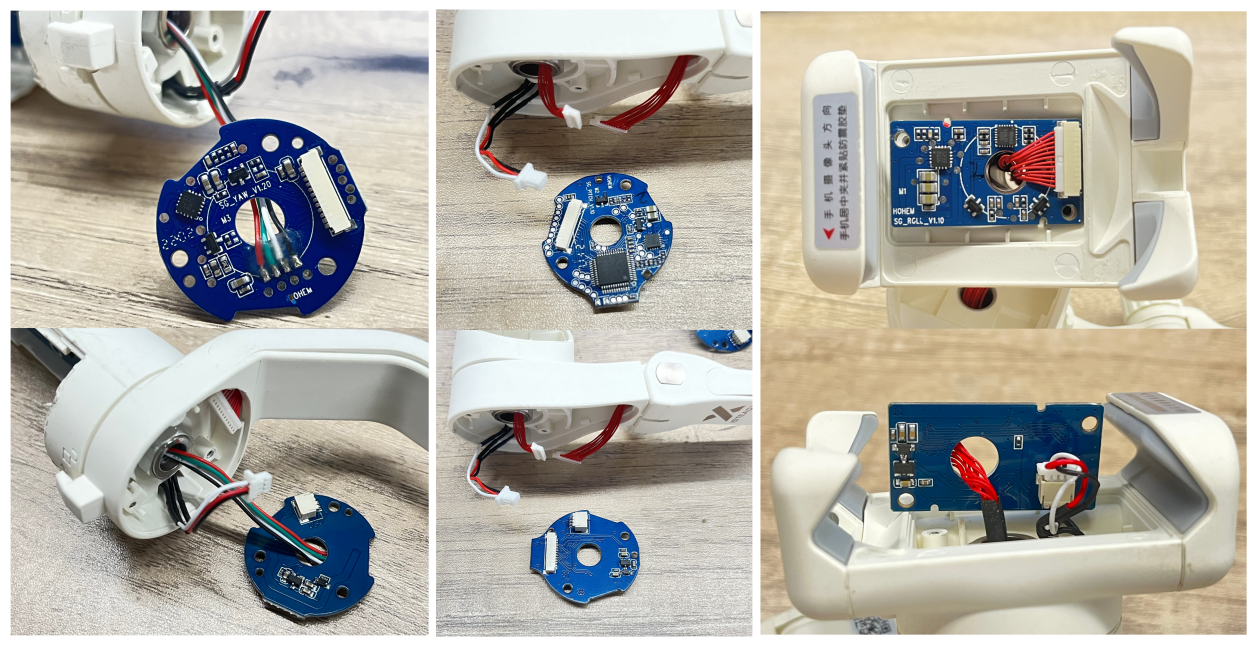
航向轴(左)、横滚轴(中)、俯仰轴(右)
通过对电路的对比,他们之间非常的相似,但又略有不同。这里可以把航向轴看做是一块基础板,横滚轴在航向轴的基础上,多了一颗控制云台的MCU。俯仰轴在航向轴的基础上,多了一颗手机偏转位置信息读取的陀螺仪。
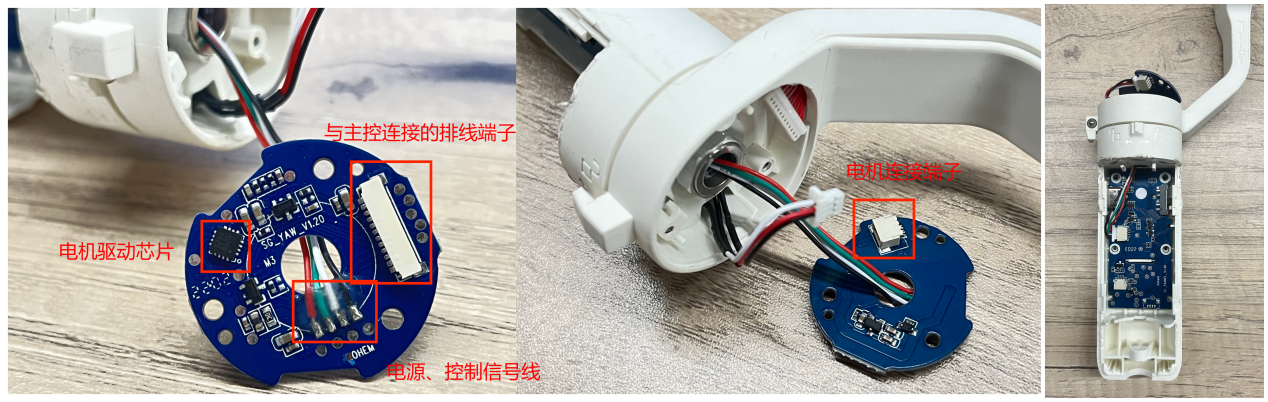
航向轴正面(左) 反面(中)电路
上图为航向轴的电路板,这部分电路主要由三个接线端子和一颗电机驱动芯片构成。其中,圆孔附近的4根线主要负责连接电源,以及由外部向云台输入控制信号的作用。外部输入的信号,会通过排线传递到横滚轴上的MCU进行数据处理。在电机驱动芯片的背面为一颗与电机动力线互联的接线端子。
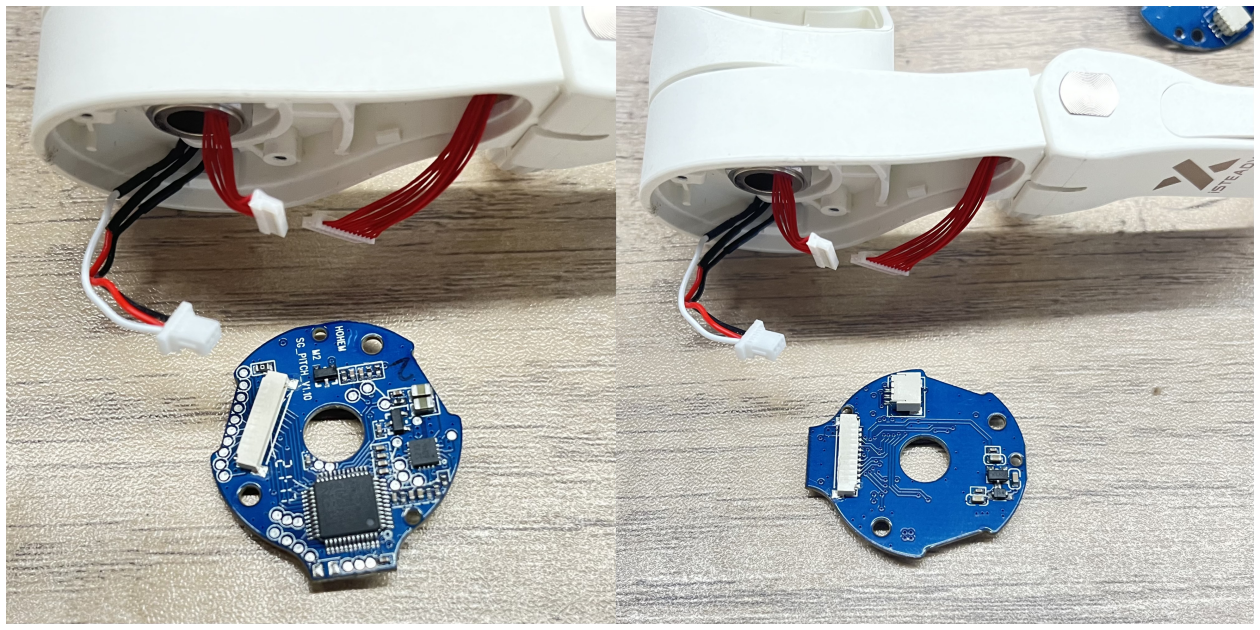
横滚轴正面(左)反面(右)
横滚轴为云台控制的主要数据处理单元,使用到了一颗雅特力的32位MCU,通过排线与俯仰轴、航向轴以及握杆部分电路相连,实现控制信号的读取和电机驱动信号的发送。
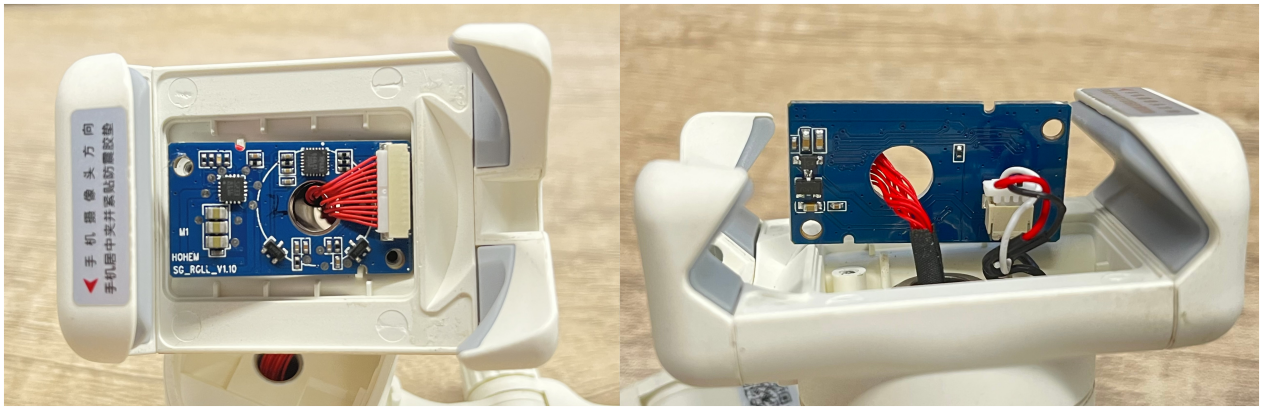
俯仰轴除了电机驱动芯片之外,还使用到了一颗能够实时测量手机的偏转角度、方向加速度等运动数据的三轴陀螺仪芯片。并且这颗陀螺仪芯片会将采集到的数据与横滚轴上的MCU保持实时通信,经过数据处理后,MCU会向横滚轴和俯仰轴内部的电机发出一个反向的驱动信号,来调整手机的角度,抵消晃动。
云台握杆拆解
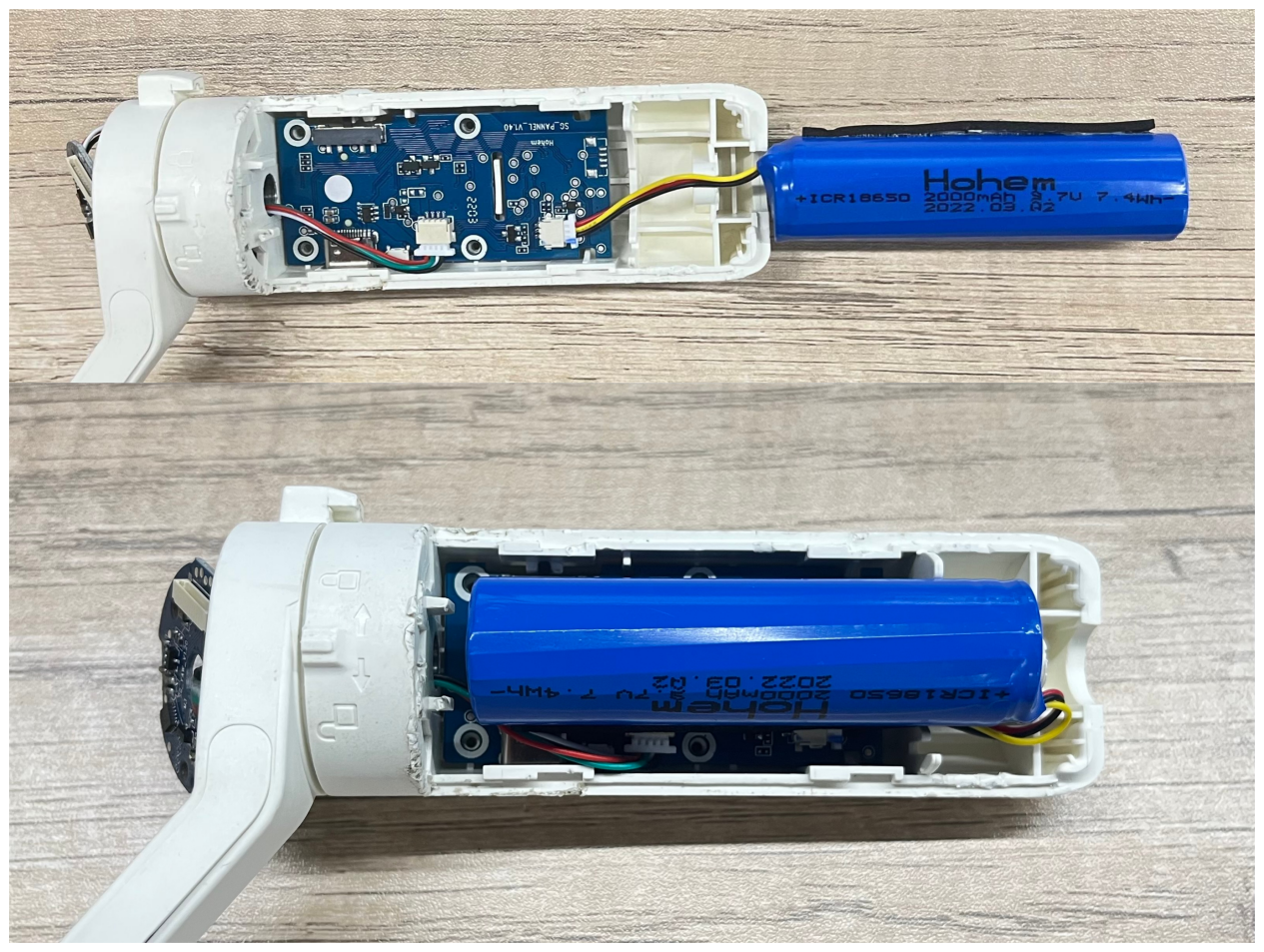
握杆部分主要以电池的充放电管理单元和无线通信单元组成,还内置了一颗容量为2000mAh的18650锂电池。电池与电路板之间只使用了泡沫棉进行隔离,并没有使用胶水或其他东西对电池进行固定。

板子正面的绿色组件为云台与手机互联的无线通信单元,它是来自泰凌微的低功耗蓝牙模组,使用的是TLSR823x系列的32位MCU,支持蓝牙5.0的通信协议。旁边是一颗为蓝牙主控提供时钟的24.0MHz有源晶振。这里之所以使用板载小板的设计主要是为了降低研发成本,缩短产品开发周期。
同时,该蓝牙模组作为手机与云台之间连接唯一通道,云台上的视频拍摄、变焦控制以及手机端的人物锁定、物体追踪功能都是基于这个蓝牙模块实现的。
当按下视频录制键或变焦控制按钮时,蓝牙模块会向手机端发射一个控制信号,手机端软件会对接收到的信号进行识别,并执行相应的指令。当启用物体追踪功能时,手机端软件会先对被锁定物体进行识别,再通过蓝牙模块与控制云台转动的MCU完成通信,实现物体追踪。换而言之,这个蓝牙模块既可以通过云台控制手机,也可以通过手机控制云台。
蓝牙模组上方是一颗丝印为HD7000A的5V/1A单电芯充电管理芯片,由于该云台使用的电池输出电压仅为3.7V,不能满足电机的工作电压需求。未解决这一问题,板子上还设计了一套由升压芯片和电感、二极管、三极管构成的升压电路来提高电机输入端的电压,带动云台的转动。
总结
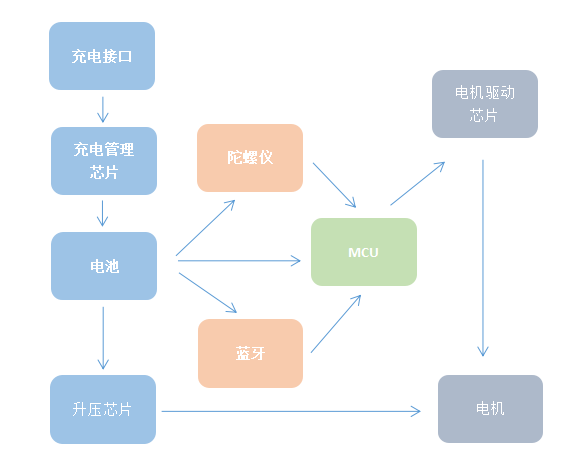
通过拆解来看,其实手持云台的构造原理还是比较简单的,主要通过陀螺仪来获取手机当前的位置、加速度信息,配合MCU驱动电机旋转,实现视频拍摄防抖的目的,具体的云台结构如上图所示。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
内部拆解:蓝光与普通刻录机有何不同?2011-02-23 9826
-
【品胜云路由试用体验】+ 简单拆解2015-12-31 11519
-
小米电视震撼拆解:内部芯片电路设计构造曝光2013-09-13 57947
-
大疆推出了一个手持云台,号称是比Gopro更专业的“运动”相机2016-08-26 11210
-
拆解魅蓝3s ,看其内部构造2018-07-05 8021
-
三星Galaxy S8+拆解,内部构造竟是这样2018-08-01 9725
-
索尼A7RII拆解,机身小巧,内部构造及其复杂2018-07-30 13628
-
Apple Watch的内部构造到底长啥样?Apple Watch拆解2018-07-29 26502
-
LGG3拆解 内部构造并不复杂2018-10-12 8755
-
iPhone新品拆解:探究苹果年度旗舰的内部做工2018-10-17 5379
-
大疆手持云台如影S评测 相机手持云台首选2018-11-22 16176
-
iPhoneXR拆解 内部构造究竟怎么样2019-06-14 9330
-
华为Mate20X5G拆解 内部构造到底如何2019-07-30 23638
-
德州仪器运动相机和手持云台解决方案2022-10-31 720
全部0条评论

快来发表一下你的评论吧 !
