

使用OpenCV+ONNXRuntime部署YOLOV7目标检测
描述
简单说明
分别使用OpenCV、ONNXRuntime部署YOLOV7目标检测,一共包含12个onnx模型,依然是包含C++和Python两个版本的程序。 编写这套YOLOV7的程序,跟此前编写的YOLOV6的程序,大部分源码是相同的,区别仅仅在于图片预处理的过程不一样。YOLOV7的图片预处理是BGR2RGB+不保持高宽比的resize+除以255 由于onnx文件太多,无法直接上传到仓库里,需要从百度云盘下载,

YOLOV7的训练源码是:

跟YOLOR是同一个作者的。
OpenCV+YOLOv7
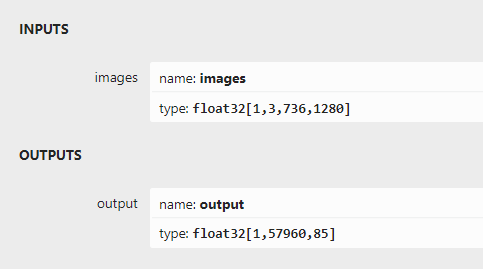
推理过程跟之前的YOLO系列部署代码可以大部分重用!这里就不在赘述了,详细看源码如下:输出部分直接解析最后一个输出层就好啦!
详细实现代码如下:
#include#include #include #include #include #include using namespace cv; using namespace dnn; using namespace std; struct Net_config { float confThreshold; // Confidence threshold float nmsThreshold; // Non-maximum suppression threshold string modelpath; }; class YOLOV7 { public: YOLOV7(Net_config config); void detect(Mat& frame); private: int inpWidth; int inpHeight; vector class_names; int num_class; float confThreshold; float nmsThreshold; Net net; void drawPred(float conf, int left, int top, int right, int bottom, Mat& frame, int classid); }; YOLOV7::YOLOV7(Net_config config) { this->confThreshold = config.confThreshold; this->nmsThreshold = config.nmsThreshold; this->net = readNet(config.modelpath); ifstream ifs("coco.names"); string line; while (getline(ifs, line)) this->class_names.push_back(line); this->num_class = class_names.size(); size_t pos = config.modelpath.find("_"); int len = config.modelpath.length() - 6 - pos; string hxw = config.modelpath.substr(pos + 1, len); pos = hxw.find("x"); string h = hxw.substr(0, pos); len = hxw.length() - pos; string w = hxw.substr(pos + 1, len); this->inpHeight = stoi(h); this->inpWidth = stoi(w); } void YOLOV7::drawPred(float conf, int left, int top, int right, int bottom, Mat& frame, int classid) // Draw the predicted bounding box { //Draw a rectangle displaying the bounding box rectangle(frame, Point(left, top), Point(right, bottom), Scalar(0, 0, 255), 2); //Get the label for the class name and its confidence string label = format("%.2f", conf); label = this->class_names[classid] + ":" + label; //Display the label at the top of the bounding box int baseLine; Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine); top = max(top, labelSize.height); //rectangle(frame, Point(left, top - int(1.5 * labelSize.height)), Point(left + int(1.5 * labelSize.width), top + baseLine), Scalar(0, 255, 0), FILLED); putText(frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0, 255, 0), 1); } void YOLOV7::detect(Mat& frame) { Mat blob = blobFromImage(frame, 1 / 255.0, Size(this->inpWidth, this->inpHeight), Scalar(0, 0, 0), true, false); this->net.setInput(blob); vector outs; this->net.forward(outs, this->net.getUnconnectedOutLayersNames()); int num_proposal = outs[0].size[0]; int nout = outs[0].size[1]; if (outs[0].dims > 2) { num_proposal = outs[0].size[1]; nout = outs[0].size[2]; outs[0] = outs[0].reshape(0, num_proposal); } /////generate proposals vector confidences; vector boxes; vector classIds; float ratioh = (float)frame.rows / this->inpHeight, ratiow = (float)frame.cols / this->inpWidth; int n = 0, row_ind = 0; ///cx,cy,w,h,box_score,class_score float* pdata = (float*)outs[0].data; for (n = 0; n < num_proposal; n++) ///ÌØÕ÷ͼ³ß¶È { float box_score = pdata[4]; if (box_score > this->confThreshold) { Mat scores = outs[0].row(row_ind).colRange(5, nout); Point classIdPoint; double max_class_socre; // Get the value and location of the maximum score minMaxLoc(scores, 0, &max_class_socre, 0, &classIdPoint); max_class_socre *= box_score; if (max_class_socre > this->confThreshold) { const int class_idx = classIdPoint.x; float cx = pdata[0] * ratiow; ///cx float cy = pdata[1] * ratioh; ///cy float w = pdata[2] * ratiow; ///w float h = pdata[3] * ratioh; ///h int left = int(cx - 0.5 * w); int top = int(cy - 0.5 * h); confidences.push_back((float)max_class_socre); boxes.push_back(Rect(left, top, (int)(w), (int)(h))); classIds.push_back(class_idx); } } row_ind++; pdata += nout; } // Perform non maximum suppression to eliminate redundant overlapping boxes with // lower confidences vector indices; dnn::NMSBoxes(boxes, confidences, this->confThreshold, this->nmsThreshold, indices); for (size_t i = 0; i < indices.size(); ++i) { int idx = indices[i]; Rect box = boxes[idx]; this->drawPred(confidences[idx], box.x, box.y, box.x + box.width, box.y + box.height, frame, classIds[idx]); } } int main() { Net_config YOLOV7_nets = { 0.3, 0.5, "models/yolov7_736x1280.onnx" }; ////choices=["models/yolov7_736x1280.onnx", "models/yolov7-tiny_384x640.onnx", "models/yolov7_480x640.onnx", "models/yolov7_384x640.onnx", "models/yolov7-tiny_256x480.onnx", "models/yolov7-tiny_256x320.onnx", "models/yolov7_256x320.onnx", "models/yolov7-tiny_256x640.onnx", "models/yolov7_256x640.onnx", "models/yolov7-tiny_480x640.onnx", "models/yolov7-tiny_736x1280.onnx", "models/yolov7_256x480.onnx"] YOLOV7 net(YOLOV7_nets); string imgpath = "images/dog.jpg"; Mat srcimg = imread(imgpath); net.detect(srcimg); static const string kWinName = "Deep learning object detection in OpenCV"; namedWindow(kWinName, WINDOW_NORMAL); imshow(kWinName, srcimg); waitKey(0); destroyAllWindows(); }
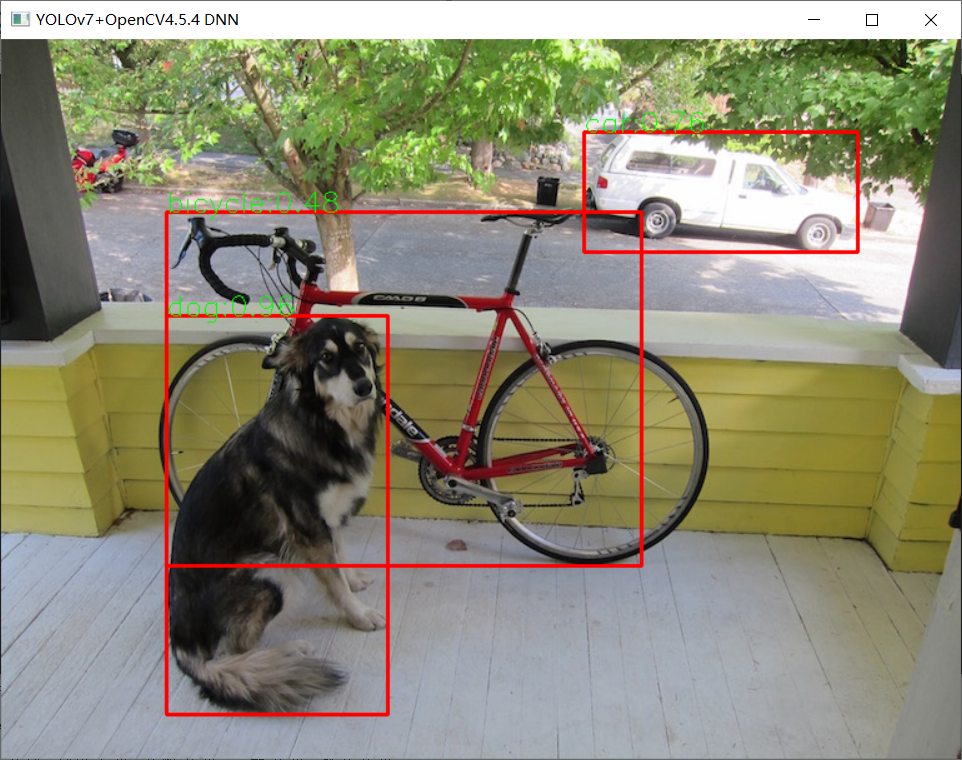
运行测试如下:

审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
YOLOV7网络架构解读2023-11-29 3311
-
在英特尔AI开发板上用OpenVINO NNCF优化YOLOv72024-01-05 1869
-
yolov7 onnx模型在NPU上太慢了怎么解决?2023-04-04 1196
-
无法使用MYRIAD在OpenVINO trade中运行YOLOv7自定义模型怎么解决?2023-08-15 641
-
深度解析YOLOv7的网络结构2022-09-14 8952
-
YOLOv6在LabVIEW中的推理部署(含源码)2024-11-06 1743
-
YOLOv7训练自己的数据集包括哪些2023-05-29 2438
-
三种主流模型部署框架YOLOv8推理演示2023-08-06 4211
-
yolov5和YOLOX正负样本分配策略2023-08-14 4751
-
使用OpenVINO优化并部署训练好的YOLOv7模型2023-08-25 2983
-
OpenCV4.8+YOLOv8对象检测C++推理演示2023-09-27 2940
-
详细解读YOLOV7网络架构设计2023-11-27 1969
-
基于OpenCV DNN实现YOLOv8的模型部署与推理演示2024-03-01 3673
-
在树莓派上部署YOLOv5进行动物目标检测的完整流程2024-11-11 5549
-
采用华为云 Flexus 云服务器 X 实例部署 YOLOv3 算法完成目标检测2025-01-02 1363
全部0条评论

快来发表一下你的评论吧 !
