

为什么要对移动条件FB PSPS进行编程呢
描述
对移动条件 FB ONL (仅当)进行编程:
应用移动条件是为了能有目的地让机器人停机,例如出现故障情况或者在锁闭的时候。
用此指令可编程设定机器人行驶的条件(布尔算子)。 在需要时,可对多个算子 (最多到 11 个)进行逻辑连接。 如果该机器人移动的条件不再能满足,则机器人将停止。
移动条件 FB ONL 将在向目标点运动的过程中与 PLC 触发器不同步地激活。并且保持激活状态直至编定了新的移动条件 FB ONL或 FB PSPS 程序。

只要满足下列条件,则机器人将一直移动:输入端 100 为 TRUE。如果输入端为 FALSE,则机器人将停止。
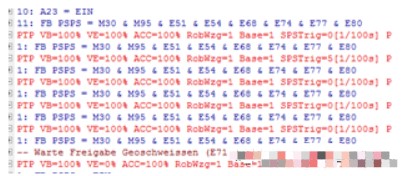
对移动条件 FB PSPS 进行编程:
应用移动条件是为了能有目的地让机器人停机,例如出现故障情况或者在锁闭的时候。
用此指令可编程设定机器人行驶的条件(布尔算子)。 在需要时,可对多个算子 (最多到 11 个)进行逻辑连接。 如果该机器人移动的条件不再能满足,则机器人将停止。
移动条件 FB PSPS 将在目标点处激活,或在用 PLC 触发器定义的到达目标点之前的一个时间点处激活。并且保持激活状态直至编程设定了新的移动条件FBPSPS 或移动条件 FB ONL。
移动条件 FB PSPS 将覆盖之前程序编定的移动条件 FB ONL.

只要满足下列条件,则机器人将一直移动:输入端 200 为 TRUE。如果输入端为 FALSE,则机器人将停止。
大众程序中广泛使用了FB PSPS,例如:
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
进行 SI 仿真,需要具备哪些前提条件呢?2014-12-15 0
-
请问通过8168的sata口连接2.5英寸笔记本硬盘,需要对移动硬盘进行什么处理吗?2018-07-25 0
-
西门子PLC编程功能块FB和功能FC的不同之处是什么2020-12-02 0
-
为什么要对DRAM进行刷新2021-09-28 0
-
为什么要对电机控制板进行隔离呢2021-11-11 0
-
如何使用simulink对STM32进行编程呢2021-11-18 0
-
Arduino是什么?如何对Arduino进行编程呢2021-12-08 0
-
我们为什么要对PCB进行拼板呢?2023-04-17 0
-
为什么要对电路进行仿真?2009-07-01 14759
-
西门子PLC编程中FB和FC的区别2011-06-20 16214
-
MELSEC iQ F FX5编程手册(指令通用FUN/FB篇)2022-08-28 532
-
MELSEC iQ R编程手册(CPU模块用指令/通用FUN/通用FB篇)2022-08-25 364
-
MELSEC iQ L编程手册(CPU模块用指令/通用FUN/通用FB篇)2022-08-26 347
-
监控机器人运动的过程条件FB ONL/FB PSPS2023-07-07 1087
-
为何我们需要对交换机进行VLAN的划分呢?2023-11-28 1459
全部0条评论

快来发表一下你的评论吧 !
