

KUKA机器人2轴平衡配重拆卸技巧
机器人
551人已加入
描述
1、沿正向移动机器人,使间隔块落位于活塞杆上。
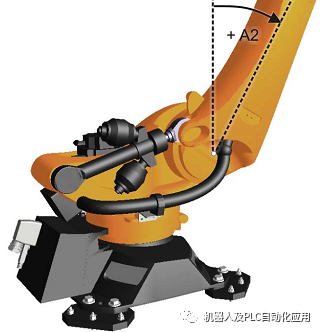
2. 将间隔块置于鱼眼接头与液压缸之间敞露的活塞杆上,为此,将橡胶波纹管往后推。
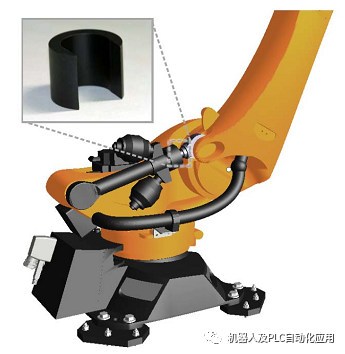
3. 将大臂小心地往负向移动,直到间隔块直着固定好。
4. 用合适的设备 (如起重机)固定平衡配重。
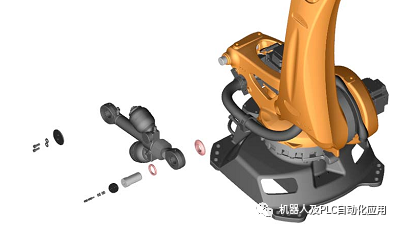
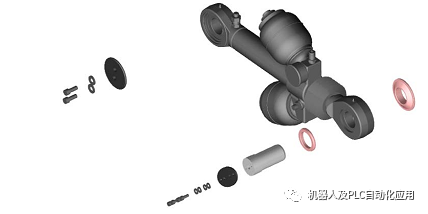
5. 拧出四个内六角螺栓及碟形垫圈,并取下止动垫圈。使用拔销器,将螺栓从大臂中拔出.
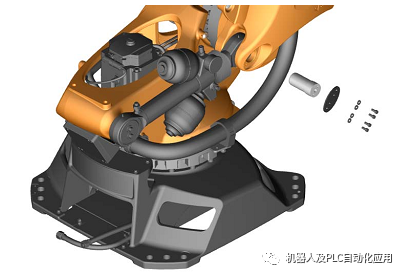
6. 旋出两个内六角螺栓及止动垫圈,取下旋转机体盖板,小心地从旋转机体的螺栓上取下平衡配重。
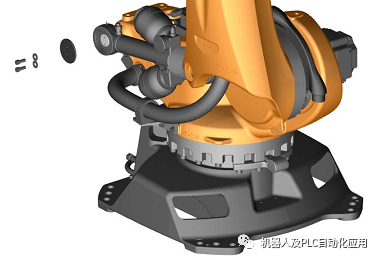
7. 将平衡配重往上抬起。其间取下止推垫圈和定距环。
8. 将平衡配重放在一块合适的垫子上。
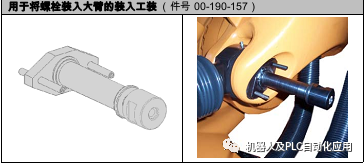
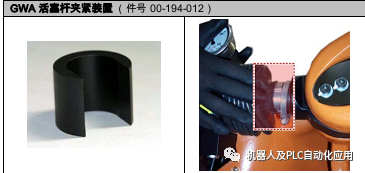
所需的专用工具:
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- �
-
库卡KUKA机器人常见故障维修2025-03-08 1569
-
LabVIEW的六轴工业机器人运动控制系统2023-12-21 3858
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3771
-
拆卸KUKA机器人2轴平衡配重详解2023-02-20 3550
-
拆卸KUKA机器人2轴平衡配重步骤2022-12-28 1328
-
KUKA C4更换机器人的2轴平衡缸2022-04-20 8579
-
KUKA机器人伺服驱动模块维修2021-09-17 1746
-
库卡机器人MGV电源模块维修2021-09-08 1717
-
ABB机器人6640机器人平衡缸总装图及拆卸步骤详解2020-09-30 18293
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 7879
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10781
-
KUKA机器人问题解答2019-07-15 2529
-
工业机器人的末端关节旋转该精确控制?2018-11-01 4279
-
KUKA重型机器人2015-02-03 8124
全部0条评论

快来发表一下你的评论吧 !
