

通过改善能源管理的软件包Commander来优化机器人及无人机的能源供应
电子说
描述
无线电源解决方案开发商 WiBotic 宣布推出 Commander,这是一个旨在改善能源管理的软件包——使用该公司的充电技术——特别适用于包括无人机在内的大型机器人舰队。此外,其软件包提供了一个API来控制电池参数。
WiBotic的首席执行官兼联合创始人 Ben Waters在接受EEWeb采访时指出,机器人的采用正在增长,各种组织对充电系统的投资也在增长。他解释说,最大的挑战之一是将系统设计为简单灵活,同时还具有可扩展性和高度安全性。
“WiBotic Commander 的目标是为机器人操作员提供软件工具,以更好地了解并优化向异构机器人车队供电的过程,”Waters 说。“该软件将提供报告,显示机器人舰队在何处、何时以及使用多少能量,无论机器人或电池的类型如何。这将允许操作员实际移动充电站、更改充电时间表或更改充电参数(例如提供给电池的最大电压和电流),以提高他们的机器人的生产力——减少机器人的数量和成本——并使这些机器人的电池寿命更长。”
Commander API(来源:WiBotic)
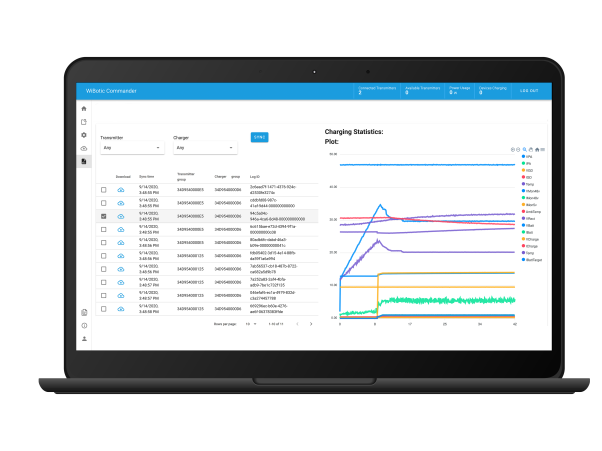
收费数据(来源:WiBotic)
能源优化
WiBotic 的无线充电系统可实现无人机的完全自主充电,因此它们可以持续待机或反复飞行,无需手动或机械更换电池。即使在没有操作员在场的情况下,这种使用也可以让您优化飞行时间——非常适合所有不需要专业人员在场的情况。
Commander 软件包的目标是提供充电基础设施的全面视图,包括充电可用性和状态的可视化,以及哪些充电系统使用率高于其他系统的历史信息。运营商现在可以轻松确定充电平台的最佳位置,以最大限度地增加无人机活动的机会。
“对于移动机器人来说,问题往往是接触式充电站体积太大,无法放置在机器人运行的区域,”沃特斯说。“因此,机器人必须离开那个区域去充电站——让它们长时间停止服务。更好地放置充电系统并使用更小且不显眼的无线充电器使机器人能够在保持在工作空间中的同时充电——例如,在短暂的停顿期间,或者在它们被加载和卸载时。”
沃特斯指出,对于无人机而言,问题更为严重,因为它们相对较小的电池放电速度非常快。无人机的典型飞行时间为 30 分钟或更短,这意味着它的航程被限制在它可以在 15 分钟内飞行的距离内,以便它有足够的电量返回家中。“随着最近自动飞行规则的放宽,无人机现在可以从充电站飞到充电站——大大扩展了它们的范围,”沃特斯说。“但是,他们必须在起飞前知道下一个充电站的状态,以免他们到达时发现另一架无人机占用了他们的着陆点或停止服务的充电站。无人机操作员必须确信充电基础设施已经到位,可以在电力线或铁路检查等应用真正实现自主之前完成远程任务。”
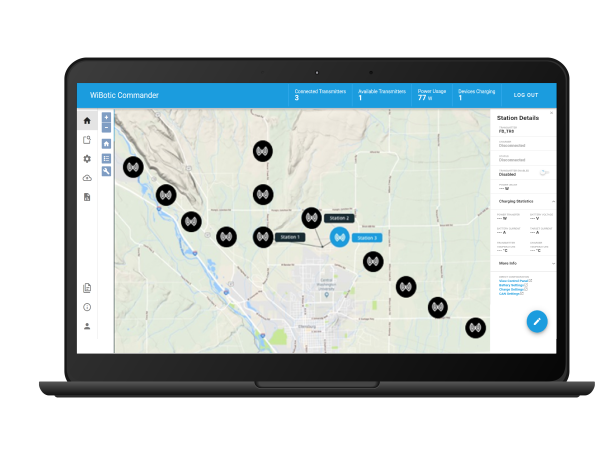
充电站地图视图(来源:WiBotic)
关键是实施主动充电技术,利用技术数据来提高电池能量。“因此,与其总是将每个电池充电到其最大电压水平和最大可能的速度 [电流]——这是大多数充电器所做的——操作员现在可以只使用完成工作所需的能量,”沃特斯说。“例如,如果电池可以让机器人运行 12 小时,而工作班次只有 8 小时,那么没有理由将电池充电到 100%。通过停止在 95%,您可以将电池寿命延长 50%。充电电流也是如此。如果机器人过夜离线 12 小时,没有理由在一小时内给电池充电。指挥官可以重置该机器人及其组中的每个机器人的充电速率,以降低充电速度,但仍可在第二天早上做好准备。”
软件包
借助 Commander 的功能和 API,Waters 解释了如何延长昂贵锂电池的使用寿命,收集和存储机器人舰队每次电池充电的每个日志文件。“该日志文件包含有关电池的宝贵数据 [它在充电期间如何接受能量以及充电需要多长时间] 以及有关充电站的信息 [即,哪些充电站现在可用,哪些充电站历史上被使用的次数超过其他人]”他说。“这些信息可用于重新设计充电基础设施,让更多机器人能够更方便地充电——尤其是在他们需要每天多次快速充电的‘机会充电’场景中。这些数据还可用于监控电池性能,以在电池故障发生之前识别它们,或对不同品牌电池的性能进行基准测试。这些数据对于电池和充电安全法规日益增长的需求也很重要。”
用户可以设置模式在白天快速充电,此时机器人的正常运行时间至关重要,而在夜间则更慢,以最大限度地延长整体电池寿命。“从本质上讲,Commander 是一种通信机制和数据库,用于在充电站网络中收集和存储信息,”Waters 说。“在当今的网络世界中,架构尽可能灵活非常重要。我们的软件团队认识到了这一点,并将 Commander 开发为“docker 容器”。这意味着它是一个独立的应用程序,几乎可以在任何计算设备上运行,从 Windows 笔记本电脑到专用 Linux 服务器,甚至像 Raspberry Pi 这样简单的东西。由于这种架构,Commander 还可以托管在云中,数据收集发生在 Internet 上的全球发射器网络中。
Commander 也可用于 IT 安全性至关重要的环境,但它也可以使用 docker RESTful 容器 API 移植到任何云。在 Commander 中看到的所有数据都可以通过调用 API 来访问,甚至可以从外部系统自动访问并根据收集到的信息采取行动。用户界面提供对所有参数状态的直接可见性,并允许用户调整充电设置并执行系统维护,例如固件更新。“例如,仓库管理系统可以识别机器人何时停机 10 分钟,并可以询问最近的 WiBotic 发射器的状态,”Waters 说。“如果可用,它可以将机器人送到该站进行快速充电,如果需要,它甚至可以调整该充电周期的充电电压和速度 [电流]。”
WiBotic 预计,Commander 将用于所有需要在单个设施内使用密集集群机器人的应用。“随着我们扩展 Commander 的能力,我们将探索其直接从‘智能’电池或机器人操作系统收集充电数据的能力,”Waters 说。“这将允许软件最终整合不使用 WiBotic 硬件的机器人。” Waters 评论说,随着时间的推移,我们可以期待在分散的机器人网络中得到更广泛的采用,其中每个位置可能只有一两个机器人,但全球有数百个位置。安全机器人、检查机器人和送货机器人是这些应用的例子,这些应用也将受益于更好的充电基础设施管理。
审核编辑 黄昊宇
-
无人机智能能源优化管理系统:信息化驱动支撑平台2026-01-14 386
-
搭载KaihongOS的工业平板、机器人、无人机等产品通过3.2版本兼容性测评,持续繁荣OpenHarmony生态2023-08-17 814
-
蝙蝠机器人:蝙蝠仿生无人机2023-02-28 3932
-
软件包改进了机器人充电基础设施的管理2022-08-03 1512
-
怎样去设计一种基于六旋翼无人机的智能空中作业机器人呢2021-11-11 3644
-
基于RX内核的家庭能源管理系统有哪些特点及应用?2021-06-30 1730
-
TDK-Lambda电源在系留无人机及水下机器人中的应用2019-08-16 3479
-
关于无人机与机器人的电机驱动参考设计2018-08-14 6781
-
全球机器人及无人机支出指南2018-08-09 5706
-
智能机器及无人机分论坛——汇顶科技、德州仪器、小i机器人邀您共探智能机器演进之路2017-11-23 13609
-
【海尔U+智能WIFI模块试用申请】智慧校园能源管理系统2017-08-03 3175
-
海思方案提供商,4K运动相机,无人机,机器人,图传2017-01-20 10454
-
赢得百万设计大奖的Gimball无人机器人2015-03-04 6319
全部0条评论

快来发表一下你的评论吧 !
