

带自供电系统的太阳能跟踪传感器
MEMS/传感技术
描述
本文介绍了设计一种简单的自供电太阳能跟踪传感器电路的可能性。整个电路是自供电的,因为它只使用从光电探测器获得的电力。无需额外的外部电源。光电探测器的布置使得它们可以感知太阳辐照度的方向。基于输出端的信号处理电路,产生两个高度敏感的电压信号。这些信号对应于太阳相对于光电二极管的俯仰角和滚动角。该电路具有固有的自动增益控制。因此,输出信号仅与这些角度成正比,而不与太阳辐照水平成正比。
传感器电路
所提出的简单自供电太阳能跟踪传感器电路的示意图如图 1 所示。处理来自光电探测器的信号只需要两个运算放大器和几个电阻器。此外,由于光电探测器(光电二极管 PDYU1、PDYU2、PDYD1、PDYD2、PDXR1、PDXR2、PDXL1 和 PDXL2)在光伏模式下工作,因此产生的功率足以为运算放大器供电。X 和 Y 方向均使用四个串联的光电二极管(PDYU1、PDYU2、PDYD1 和 PDYD2)为运算放大器 OP1 和 OP2 供电。在光伏模式下在光电二极管处获得的相应电压由下式给出:
其中 V1 是对应的第 i 个(i = YU1、YU2、YD1、YD2、XR1、XR2、XL1 和 XL2)光电二极管电压,是由下式给出的热电压 其中 = 1.38×10-23 J/K 是玻尔兹曼常数,是绝对温度,= 1.602×10-19 C 是基本电荷,ℜ 是光电二极管响应度,是第 i 个光电二极管捕获的光功率,并且是光电二极管饱和电流。
为了将光电二极管保持在光伏模式,它们必须连接到高阻抗节点,因此需要高电阻值 RL。相应的光电二极管捕获的光功率取决于外壳内的阴影位置,即它取决于有源光电二极管表面上的阴影分布。如图 1 所示。光电二极管表面上的主动照明区域取决于太阳相对于光电二极管的俯仰角和滚动角,如图 2 所示。这自然只对满足以下条件的光电二极管有效。被外壳遮住了。例如,如果太阳从第一象限照射传感器,如图 2 所示,则只有光电二极管 PDYU2 和 PDXR2 处于阴影中,它们对应的照射区域将是:
其中假设小间距 ξ 和滚动 ψ 角 (ξ, ψ ≪ 1) 因此在第一近似中给出了被照射光电二极管区域相对于相应角度的线性相关性,其中 A 是光电二极管有源表面的面积, K 是取决于传感器几何形状的正比例常数,其中 A ≫ Kξ, Kψ 也是有效的。
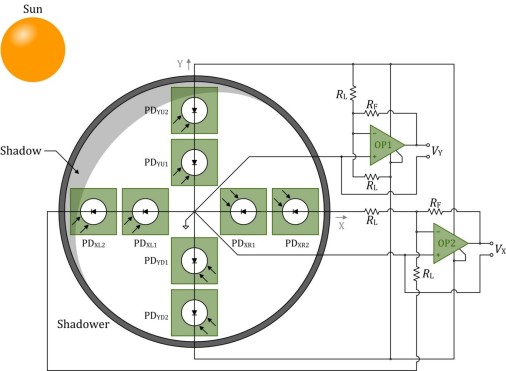
图 1:简单的自供电太阳能跟踪传感器电路原理图
根据等式 (1) 的相应光电二极管电压由下式给出:
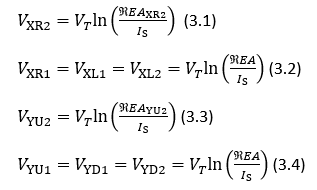
其中 E 是太阳辐照度。输出电压 V X和 V Y如下所示:
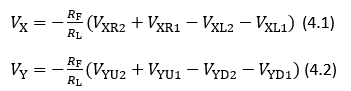
其中 R F是反馈电阻器的电阻。等式 (2)、(3) 和 (4) 给出:
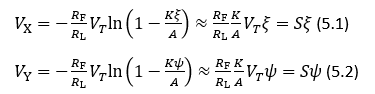
在第一近似中,输出电压信号 V X和 V Y与传感器灵敏度 S 的俯仰角和滚动角成正比。由于输出信号与太阳辐照度无关,因此电路具有固有的自动增益控制。
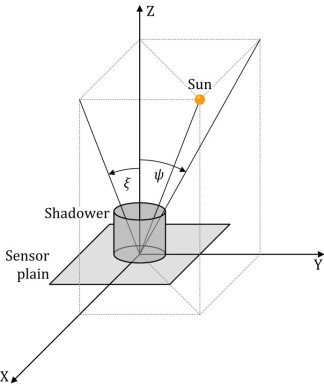
图 2:太阳相对于传感器的位置测量
使用 SLG88103 运算放大器实现
一个简单的自供电太阳能跟踪传感器电路的实现将基于GreenPAK™ SLG88103运算放大器的极低功耗特性。为了测试所提出的电路,已经在 LTspice 中进行了仿真。仅针对单轴的仿真电路如图 3 所示。系统电路由两个这样的子电路组成,每个子电路都旨在感测太阳的单轴位置。作为光电探测器,欧司朗光电半导体的四个 BPW34 光电二极管已用于仿真,因为它们的感应面积相对较大,为 7.45 mm 2(2.73 毫米 × 2.73 毫米)。光电二极管的 spice 模型也由 Opto Semiconductors 提供 [BPW 34 B Silicon PIN Photodiode with Enhanced Blue Sensitivity; 在 SMT 版本 1.6,数据表,欧司朗光电半导体]。
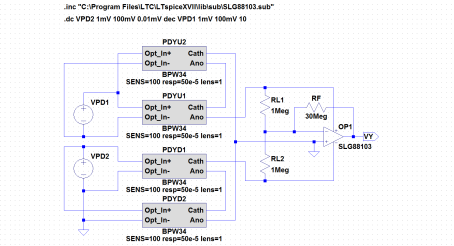
图 3:仿真电路原理图
太阳辐照度由两个电压源 VPD1 和 VPD2 建模,其中以毫伏 (mV) 为单位的电压对应于以 mW/cm2 为单位的太阳辐照度。太阳辐照度在1 mW/cm2(1 mV)和100 mW/cm2(100 mV)的范围内进行扫描,其中100 mW/cm2也代表了太阳辐照度的最大可能值。如上所述,如果传感器表面与太阳之间的角度不垂直,即俯仰角和滚动角不等于 0,由于光电二极管的故意部分遮蔽,在光电二极管表面。太阳辐射在光电二极管表面上的不均匀分布已用不同的太阳辐照度值进行建模,即电压源 VPD1 和 VPD2 的不同值。
从仿真结果可以得出结论,该电路对太阳光照方向的变化高度敏感,这与电压源 VPD1 和 VPD2 相应电压的变化有关。所提出设计的重要特征是传感器灵敏度不依赖于太阳的整体照明,前提是运算放大器的轨到轨电压大于 1.71 V。这可以从相同的传感器响应的斜率以对数刻度表示。因此,传感器具有固有的增益控制,这是该传感器电路的一个非常重要的特性,特别是如果它已用于整体系统稳定性至关重要的控制回路中。
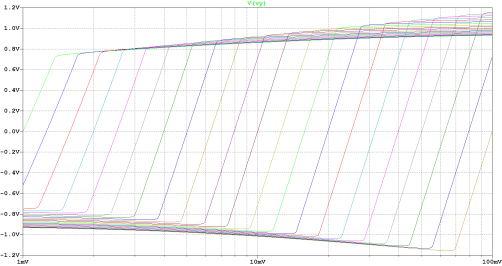
图 4:建议电路的仿真结果
光电二极管分流电阻 RSH 为:
其中,对于 BPW34 光电二极管,ℜ = 0.5 A/W、A = 7.45 mm2 和 E = 1 mW/cm2 的最小太阳辐照度,给出了 R SH ≈ 670 Ω的光电二极管分流电阻的最大值. 要在光伏模式下工作,光电二极管的分流电阻必须远小于光电二极管的负载电阻,即必须满足 R SH ≪ R L。通过选择 R L = 1 MΩ,这个条件肯定得到满足。可以任意选择反馈电阻 R F的值以获得所需的灵敏度。在本应用中,选择了 R F = 30 MΩ 的值。
根据图 4 中的仿真结果,最大输出电压在 V X ,Y MAX ≈ 1 V 的范围内。因此,流经反馈电阻和负载电阻的电流小于 IF MAX = V X ,Y MAX /R F ≈ 33 nA,远小于运算放大器的静态电流IQ = 375 nA。运算放大器的静态电流必须满足条件 IQ ≪ ℜAE 才能使光电二极管在光伏模式下同时工作并适当地偏置运算放大器。因为对于 E = 1 mW/cm 2的最小太阳辐照度,ℜAE ≈ 37 μA,这个条件也得到了满足。
示例实现
使用SLG88103 运算放大器和光电二极管的评估板创建了测试电路。原型板实现电路的照片,连同基于光电二极管的传感器,如图 5 所示。圆柱体,即阴影器,固定在传感器板上,以便在被太阳照射时形成阴影。气缸尺寸可以根据传感器灵敏度和所需的测量范围进行选择。该项目中使用的传感器具有圆柱形状的阴影,圆柱内径为 38 毫米,圆柱高度为 35 毫米。
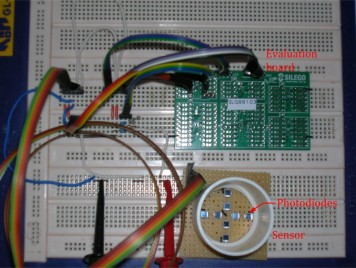
图 5:测试板与传感器的照片
为了确定整体传感器电路传递函数,传感器安装在一个平台上,其倾斜角度可以变化。传感器指向太阳,通过控制倾斜角,即平台的俯仰角和滚动角,将电压 VX 和 VY 调整为尽可能接近零。然后,通过改变平台的相应倾斜角,传感器的俯仰角和滚动角相对于太阳在 – 5° 到 + 5° 的范围内变化,同时测量输出电压。传感器电路的传递函数如图 6 所示。根据测量数据集,估计传感器灵敏度约为 S ≈ 56 mV/°。
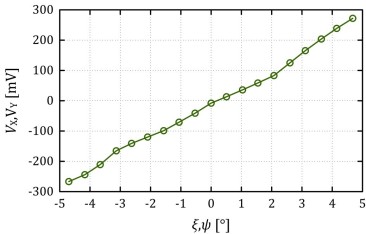
图 6:传感器电路的传递函数
总而言之,太阳能跟踪传感器在许多太阳能系统(光伏系统)中具有非常重要的作用,可以提高整个系统的效率。为了将太阳能电池板指向太阳,控制回路使用从太阳跟踪传感器获得的信号,将太阳能电池板朝向太阳旋转。因此,本申请中介绍的简单、可靠(无需额外电源)且具有成本效益的传感器将改善太阳能系统的特性。
所展示的自供电太阳能跟踪传感器电路可以使用光电探测器和阴影几何形状的不同组合进行测试,以实现更好地满足最终用户要求的特性。
审核编辑:汤梓红
-
自供电太阳能跟踪传感器2022-08-05 3252
-
太阳能跟踪装置是什么2021-07-12 2207
-
简单的自供电太阳能跟踪传感器电路设计2021-03-16 13298
-
太阳能供电系统的组成部分,太阳能是怎么发电的?2021-03-11 2716
-
无线传感器网络节点太阳能供电系统怎么设计?2020-03-27 2696
-
卧室太阳能供电系统2019-05-03 4016
-
光电传感器在太阳能应用领域的解析2018-01-16 5288
-
便携式供电系统的组成与户外便携式太阳能供电系统的设计2017-10-13 1343
-
太阳能自动跟踪控制系统光电传感器选用2017-05-03 3127
-
太阳能跟踪系统2016-04-27 4870
-
太阳能供电的无线传感系统的设计2014-01-09 2464
-
太阳能跟踪及能量转换系统 采用SLH89F51622013-09-29 4504
-
倾角传感器在太阳能跟踪系统中的应用研究2012-04-23 2808
-
基于PLC控制的太阳能自动跟踪系统2011-09-05 7132
全部0条评论

快来发表一下你的评论吧 !
