

浅谈STEP7-5.5-F程序FB块中的更改连接
描述
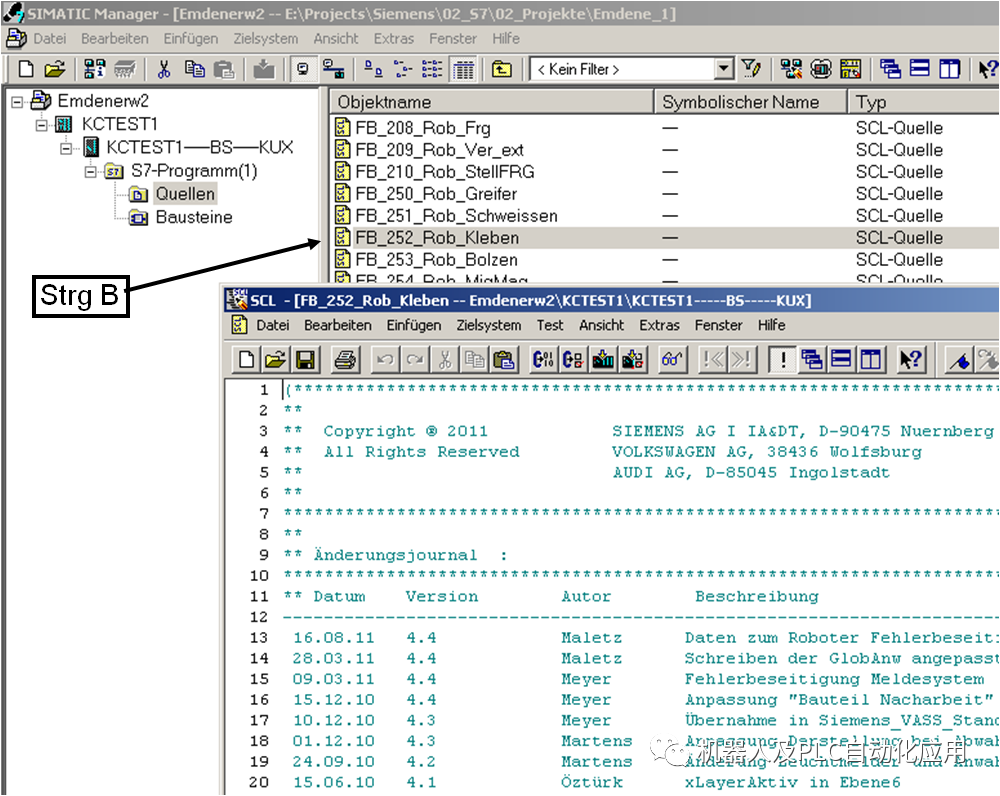
添加了新内容:机器人急停控制模块
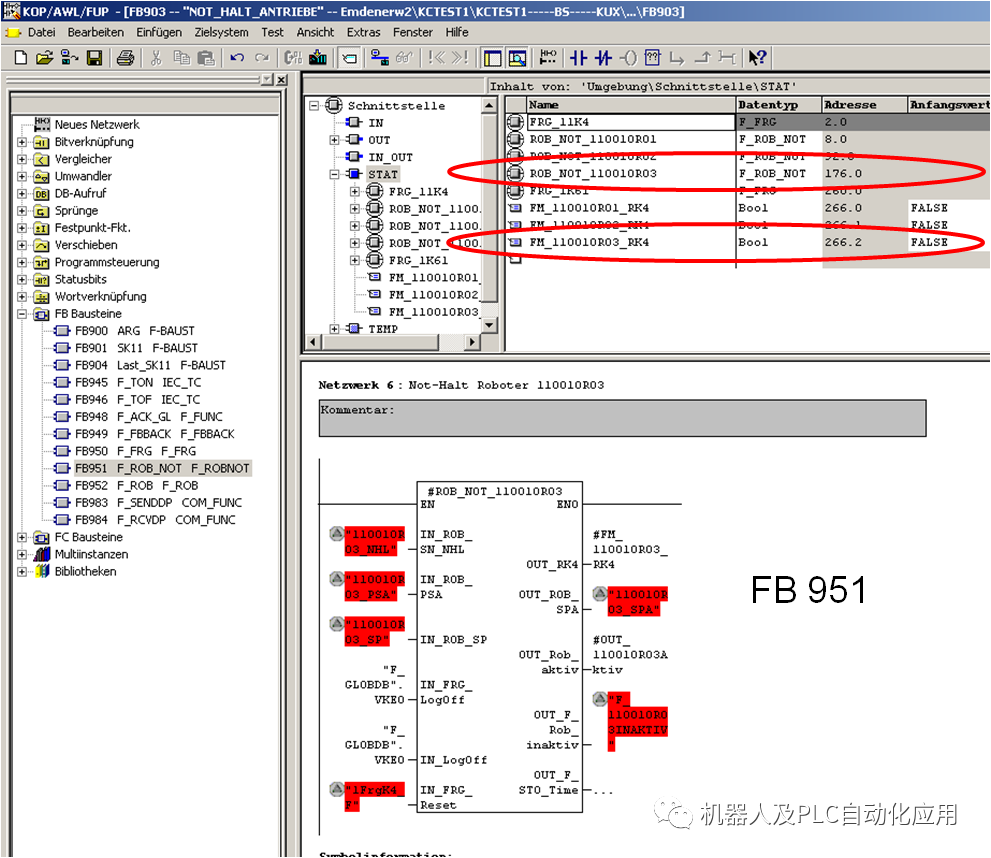
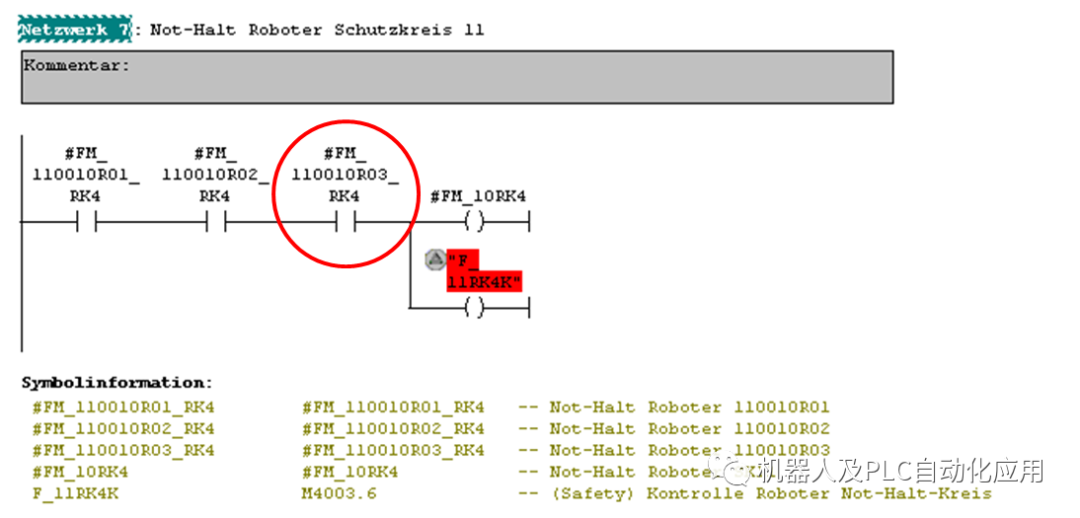
添加机器人安全控制块
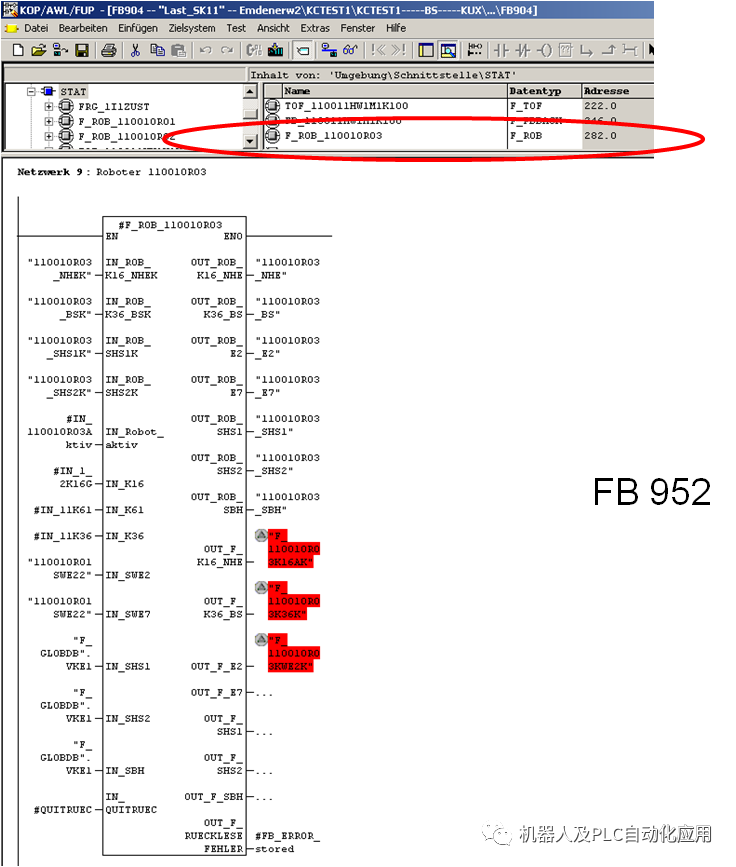
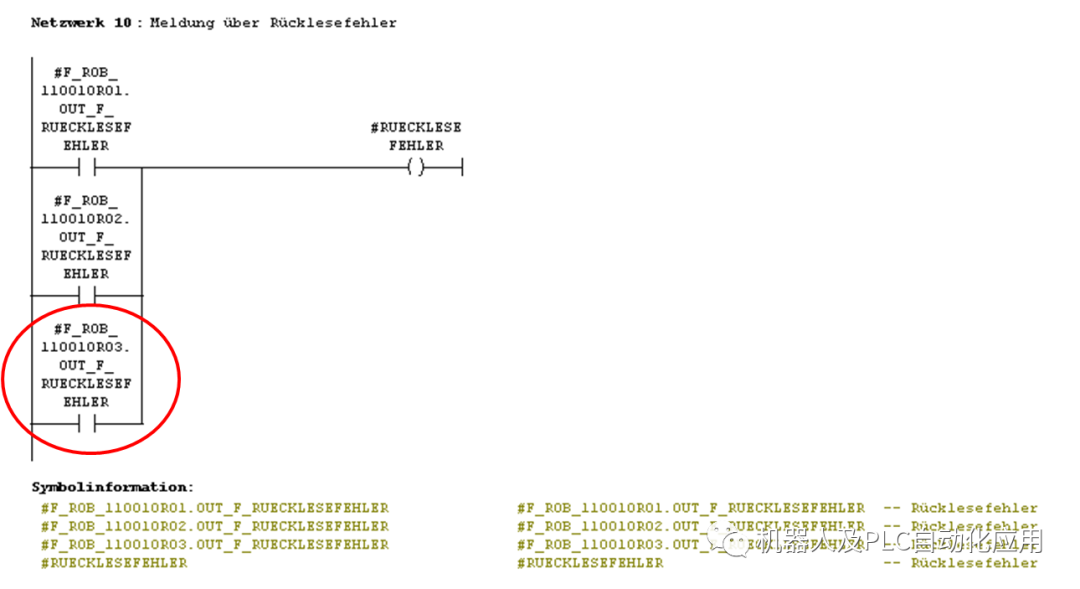
添加功能块故障报警控制
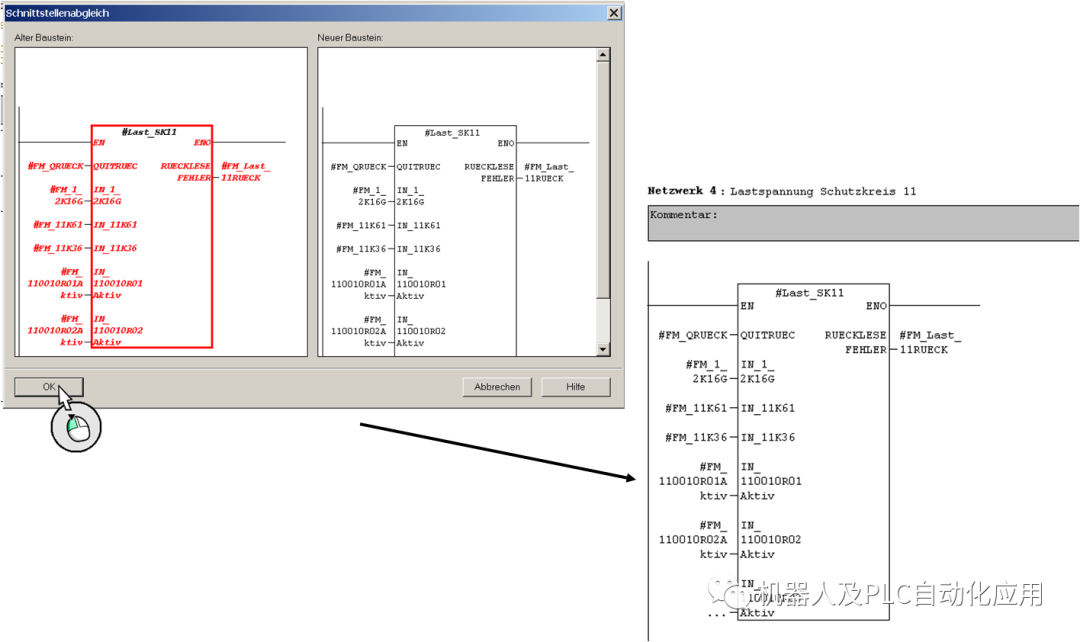
更改功能块后需要重新连接.
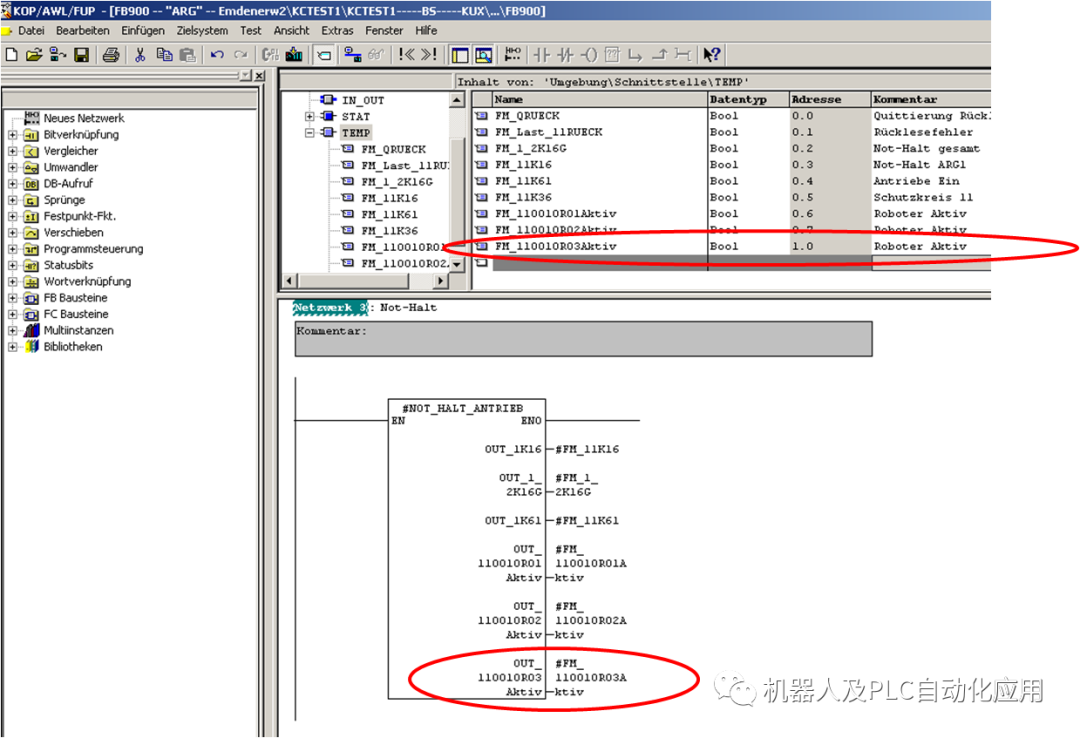
重新使用静态变量
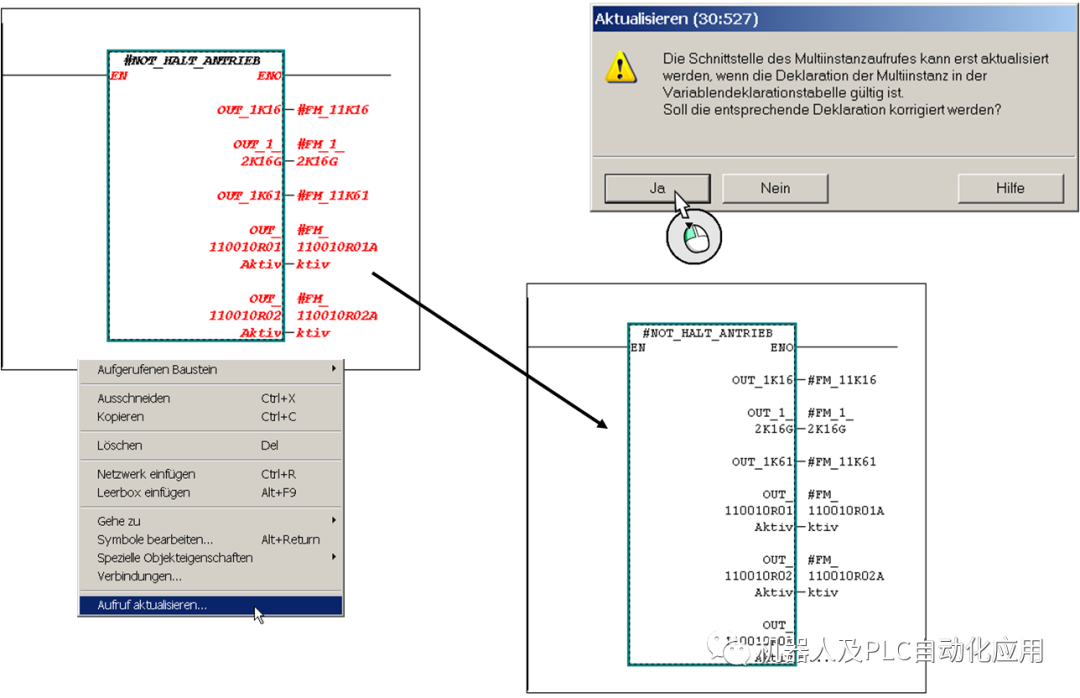
重新调用,重新连接
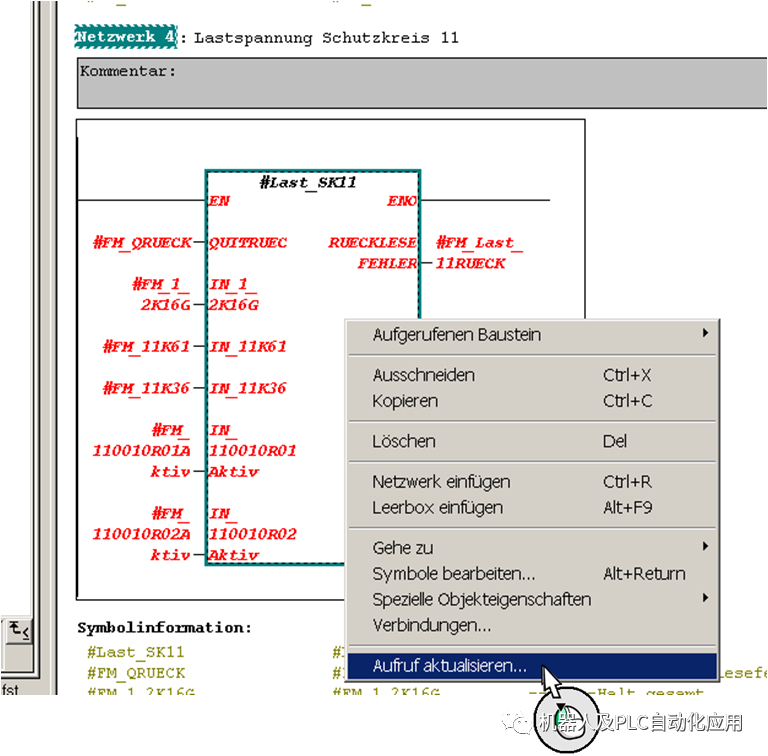
重新连接
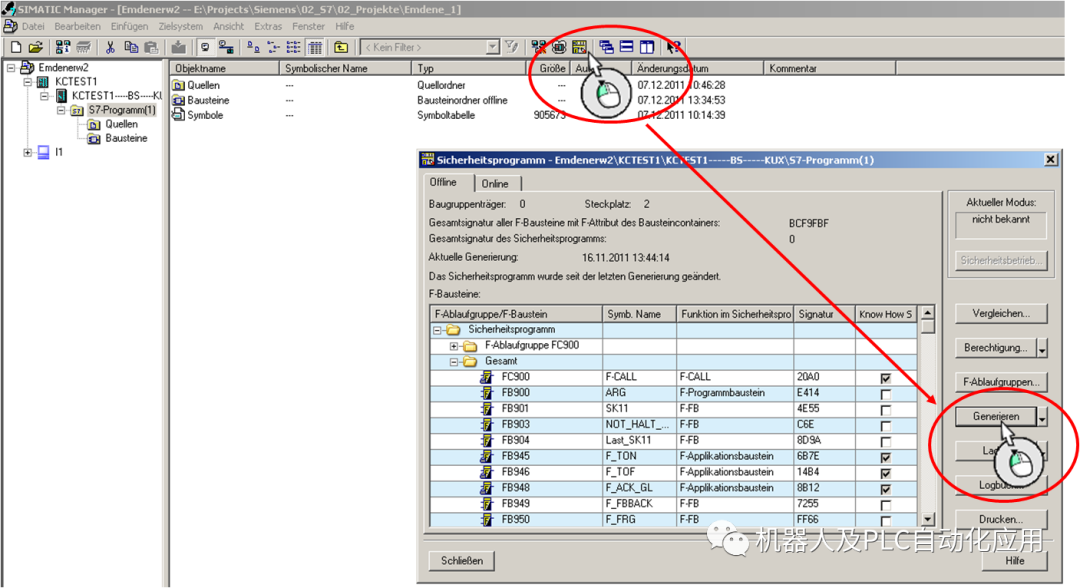
进行安全编译
-编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
STEP7-5.5-F程序中FB块修改后的变化2024-04-07 1739
-
什么是FB功能块?为什么要使用FB功能块?如何制作一个FB功能块?2023-11-09 7629
-
PLC编程中OB块、FC块、FB块、DB块的使用原则2023-05-24 22393
-
在STEP7 5.5中对S7-300 CPU程序的上载过程2023-02-12 7284
-
STEP7中SFC 12功能块的应用2023-02-07 2830
-
STEP7中SFC12功能块的应用2023-01-29 3669
-
OB FC FB块如何使用2022-08-15 10740
-
STEP7-5.5-F程序FB更改步骤简析2022-07-23 3512
-
STEP7 5.5中对S7-300 CPU程序的上载过程2022-07-15 13741
-
STEP 7中FC和FB模块的三种保护方法2021-12-20 2342
-
在用户程序中创建数据块 (DB) 以存储代码块的数据2021-03-02 5166
-
STEP 7使用教程之STEP 7V5.5中文版使用手册免费下载2018-09-06 3751
-
用Step7中SFB4x实现PID控制2012-01-13 1184
-
在STEP7中对程序块加密2011-06-21 2846
全部0条评论

快来发表一下你的评论吧 !
