

猫头鹰mini单机系统基于Visbot视觉模块的软硬件
描述
蜂群软件架构
软件架构包括单机系统和算法软件,多机协同软件,多机通讯机制。猫头鹰mini单机系统基于Visbot视觉模块的软硬件,Visbot模块负责提供飞行前进方向的深度图,同时基于Vins-fusion的双目定位算法提供飞机的姿态定位信息。
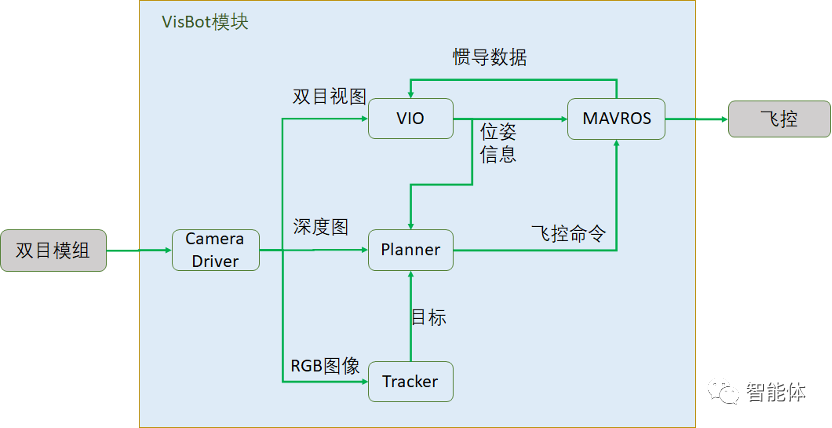
图:Visbot视觉模块软硬件架构图
如果是单机系统,类似于ego-planner的避障导航软件就可以指导飞机完成避障环境下的轨迹规划,结合我们提供的控制软件就可以进行目标飞行。但是如果在多机协同环境,还需要协调多机轨迹、位置、同步完成多机目标飞行。我们适配了ego-planner-swarm开源软件,作为多机协同下的避障导航软件。它结合了多机的位置,和各自目标下的轨迹,整体规划出防碰撞轨迹。再结合我们提供的控制软件就可以同步控制集群进行目标飞行。
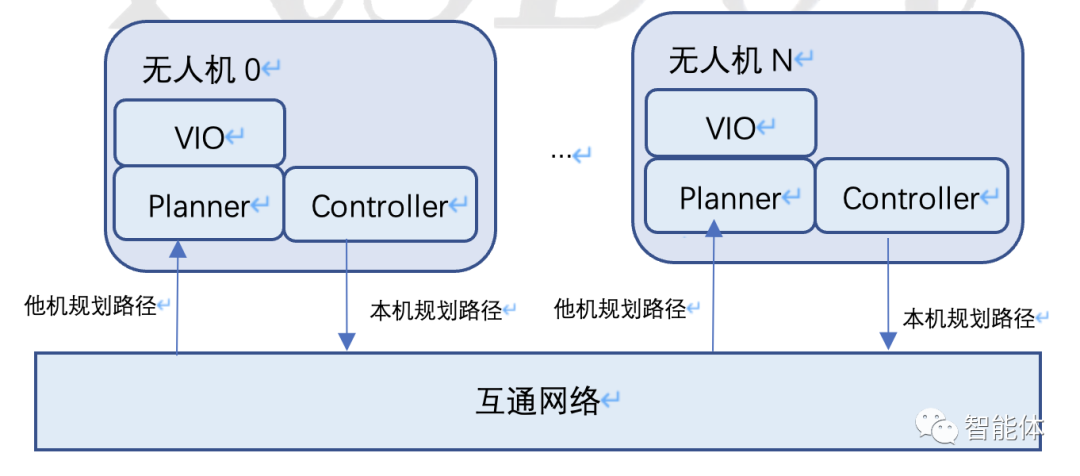
图:多机协同架构
在分布式多机协同系统中,需要互通网络环境和多机通讯机制。目前引用的ego-planner-swarm软件是基于ROS系统的多机通讯机制,是Master/Slave架构的消息通讯机制。我们Visbot视觉模块提供了Wifi接口,它可以接入大功率Wifi基站,优势是可以较长距离通讯;也可以配置成自组网模式(ROS Master配置成WifiAP), 省去Wifi基站,可以满足小范围的机群需求。
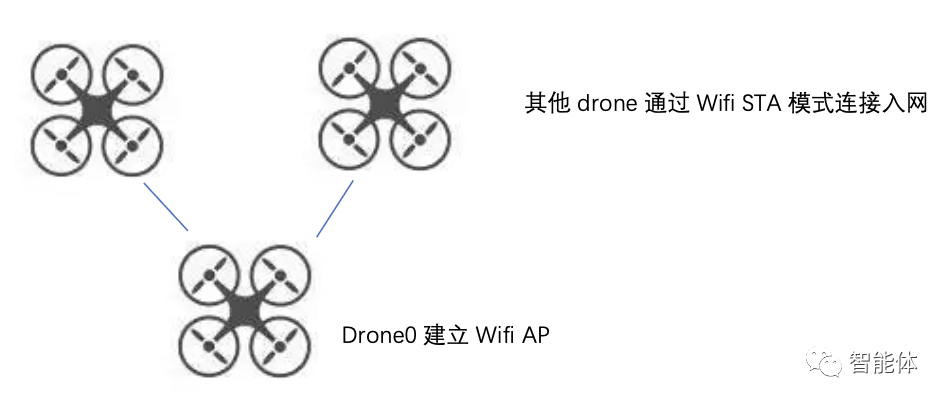
图:纯无人机Wifi组网
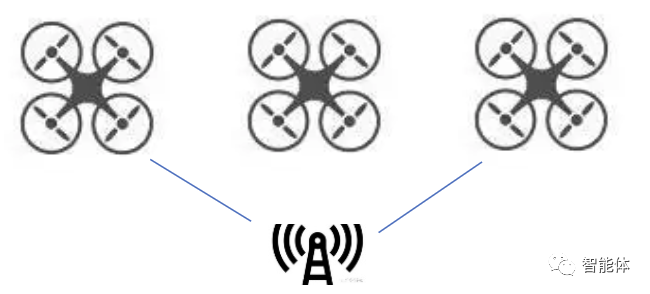
图:基于Wifi基站无人机组网
关于北京威斯博
北京威斯博科技有限公司(简称“VisBot”)2022年创立,公司致力于视觉机器人领域的研究和产品开发。2022年1月和5月,先后推出了猫头鹰和猫头鹰mini两款AI视觉无人机,主要为人工智能和机器人等方向教育和科研领域提供产品支持。产品的核心是Visbot视觉系统,集软/硬件于一身,可处理多类型数据,运行多种智能算法。其中包括双目,定位和避障算法的优化。Visbot视觉系统是基于先进的嵌入式人工智能技术,自主研发和拥有自主知识产权的软/硬件系统,可AI使能无人机,机器人等设备。视觉智能化是机器人的必然发展方向,公司致力于更智能、更高效、全自主的科研技术融入机器人世界,改变人类生活。
审核编辑 :李倩
-
鹰和猫头鹰-课件中心2014-05-20 2139
-
【猫头鹰开发板申请】基于LabVIEW的现代农业基本信息采集与处理研究2016-09-21 2065
-
【猫头鹰开发板试用体验】+A~开发板首拆开箱上电2016-09-22 2706
-
【猫头鹰开发板试用体验】+【1122】蜂鸣器实验2016-09-30 3667
-
请问猫头鹰f1系列有简易教程吗?2019-05-06 1506
-
炬力发布猫头鹰系列双核平板芯片ATM7023A2013-04-19 1949
-
猫头鹰LED别针DIY图解2019-09-29 3121
-
以猫头鹰为例,科学家有望研发低噪音机翼2020-11-19 2611
-
猫头鹰120W被动散热器开始生产2020-12-21 3129
-
猫头鹰120W被动散热器明年Q1季度上市2020-12-22 2493
-
散热器厂商猫头鹰发布redux系列首个产品2021-03-18 3176
-
UIO超声波互动猫头鹰开源分享2022-12-06 1092
-
阿基米德:人工智能机器人猫头鹰2023-02-06 976
-
机器视觉系统读取二维码-软硬件配置方案2024-05-24 1599
-
新加坡国立大学、西交利物浦、苏州大学:研究一种受猫头鹰视觉启发的类脑视觉传感器2026-03-04 1200
全部0条评论

快来发表一下你的评论吧 !
