

自主移动机器人(AMR)应用介绍
机器人
描述
自主移动机器人 (AMR) 越来越多地应用于许多行业的物流应用中。与传送带等固定材料运输系统不同,AMR 可以不受固定路线的限制而绕设施行驶。其中的无线通信和板载导航系统使其能够接收下一步走向的指令。AMR 无需编程就能导航到请求的位置,甚至能在遇到障碍物时找到另一条路径。AMR 可以通过执行非增值任务,如运输、拾取和放下材料,来提高仓库操作、制造流程和工作流程的效率和生产力,进而让人们有更多的精力来执行复杂的增值任务。尽管 AMR 是一项相对较新的技术,但已经分出了许多不同的版本,其中的每一种都已经过优化,可执行特定类型的任务。
本文将传送带系统和自动引导车辆 (AGV) 等传统移动解决方案与 AMR 进行了比较和对比。文章研究了使用 AMR 的好处,以及普及推广 AMR 设计可如何扩大其效用。本文还讨论了 AMR 车队与其他系统的软件集成,包括精确导航功能、AMR 对工作人员安全的潜在影响,以及如何管理和仿真 AMR 车队。最后,本文简要介绍了日常维护如何最大限度地延长 AMR 的使用寿命,在导致计划外停机前发现潜在问题,并根据计划关断和其他操作考虑因素,帮助主动安排维修和零件替换。
AGV 可以将材料运送到特定位置,比传送带系统更灵活;但相较于 AMR,其灵活性则要差得多。像传送带一样,AGV 有固定的路线。但相比传送带系统,利用 AGV 可以更容易和快速地修改路线。AMR 可以与人协作,提供更大的灵活性,并找到最有效的路线来完成特定任务。AMR 遇到障碍物时,可以相应地改变路线,然后继续前往目的地。AGV 遇到障碍物时,会停下来并要求协助,然后才继续执行其预先分配的轨迹(图 1)。AMR 使用机载和集中计算能力以及复杂的传感器组合来解释环境,并可绕过固定障碍物(如机架和工作站)和可变障碍物(如叉车、人员、AGV 和其他 AMR)导航。
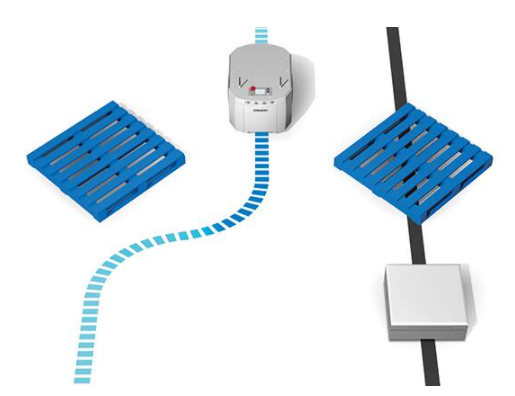
图 1:当 AMR 接近障碍物(左)时,它可以独立绕过并导航。当 AGV 接近障碍物(右)时,它会停下,并等待帮助。(图片来源:Omron)
集成工具包 (ITK) 是 Omron 的接口,可实现 AMR 和客户端应用软件(如制造执行系统 (MES) 或仓库管理系统 (WMS))之间的集中集成。例如,在仓库和配送中心环境中,AMR 可以与仓库的控制系统集成,使 AMR 在设施内的各个地点之间创建路线时具有更大的灵活性。因此,在大多数订单履行和仓库操作的动态环境中,机器人能够更好地与人类一起工作。
AMR 也可以像 AGV 一样工作
有的 AMR 应用需要机器人极其精确地停靠在特定位置并且可重复操作,如向传送带、进料器和测试台输送材料。使用 Omron AMR 的车队管理员可以选择两种高精度定位系统:单元对齐定位系统 (CAPS) 和高精度定位系统 (HAPS)。CAPS 或 HAPS 可以将目标到达精度从约 ±100 mm 提高到 ±8 mm。AMR 前面的主要安全扫描激光器被 CAPS 技术用来探测目标位置,并使 AMR 能够高精度地移动到该位置。
HAPS 技术还能以更高的精度在确定的空间内持续移动和/或精确地停靠在预定的目标,但有些差别。使用 HAPS,AMR 可以跟随地板上的磁带导航到目标,类似于 AGV。使用 AMR 下方的 HAPS 传感器,可以从完全自主模式平稳过渡到磁带定义的路径。然后,AMR 使用机载传感器和地面标记的组合来精确导航,并在特定地点停止(图 2)。

图 2:Omron CAPS(左)结合使用 AMR 前端扫描激光器与自主导航,以实现高精度定位并移动到目标位置。HAPS(右)结合使用磁带等标记物和机载传感器,以导航到特定区域并停止。(图片来源:Omron)
在 HAPS 模式下运行时,Omron AMR 可以在任何点进入和离开磁带路径。因此 AMR 能顺利地从自然特性和自主导航过渡到类似 AGV 的磁带引导。如果配备了前后端 HAPS 传感器,AMR 可以准确地沿着磁带路径前后移动。
开发人员、集成商和最终用户可以针对各种有效载荷和任务定制 Omron AMR 系统(图 3)。除了 ITK 支持的设施集成可能性之外,CAPS 和 HAPS 的结合提高了这些 AMR 需要精确和可重复定位的能力,并正在开辟新的应用,例如:
- 运输装满材料的手推车
- 零售店的库存检查
- 安全的快递机器人向酒店客人运送物品或向工作站运送高价值元器件
- 公共场所消毒
- 定制的协作式 AMR
- 传送带顶部
- 运输重达 1,500 kg 的物体

图 3:AMR 提供各种配置,可通过优化而执行特定任务。(图片来源:Omron)
安全机器人操作
AMR 必须要能安全操作。标准安全传感器的例子包括用于检测障碍物的后端声纳和前端激光器,用于在 AMR 接触到物体时制动的前端保险杠传感器,以及可提醒附近的人员 AMR 正在工作的发光盘(图 4)。此外,可以根据具体要求增加可选的传感器,如识别突出或悬挂的障碍物。AMR 须符合各种国家和国际安全法规,如 EN 1525(工业卡车、无人驾驶卡车及其系统的安全)、ANSI 56.5:2012(无人驾驶、自动引导工业车辆和有人驾驶工业车辆自动功能的安全标准)和 JIS D 6802:1997(自动引导车辆系统 - 一般安全规则)。

图 4:Omron 的 AMR 符合 ISO EN1525、JIS D6802 和 ANSI B56.5 安全标准,有多个专用于安全的标准传感器,并可配备可选的传感器,以增强特定应用场景的安全性。(图片来源:Omron)
系统级安全评估
满足各种国家和国际标准,这只不过是 AMR 安全的基本要求。AMR 是一项不断发展的技术。它们变得越来越复杂,处理的有效载荷更重,从而带来新的安全挑战。为了解决 AMR 不断演变的安全问题,Omron 可提供安全咨询服务,为 AMR 部署提供设计协助、风险评估、测试和验证。例如,新的 ISO 3691-4 标准包括对移动机器人和其他结构之间的间隙的具体要求。Omron 的 Safety Service 顾问提供的支持包括:
- 按照 ISO 3691-4 的要求进行布局设计复查和区域识别
- 设计计算,尤其是在交通量大或移动重物的应用中
- 现场解决方案的测试和验证
- AMR 车队管理员
只部署单一的 AMR,这种说法几乎闻所未闻。100 个 AMR 的车队很常见,Omron 有 AMR 管理解决方案,可提供内置的数据采集、分析和报告,使企业能够优化整个设施运作以及常驻机器人车队的性能。Enterprise Manager 2100 网络设备是一种硬件和软件解决方案,旨在管理 AMR 车队。排队管理软件可用于与各个 AMR 进行通信;它可根据用户或自动化设备的工作请求,将任务分配给每个 AMR。
Omron 的 Fleet Operations Workspace (FLOW) 解决方案可在 Enterprise Manager 2100 上运行,并提供智能车队管理系统,以监控移动机器人的位置和交通流量。Enterprise Manager 2100 让用户能够管理和更新 AMR 配置。它可协调 AMR 的交互和移动,因此每个机器人都知道其附近的任何 AMR 的位置和路径。通过自动化各种机器人管理任务,FLOW 软件可减少对制造执行系统 (MES) 和企业资源规划 (ERP) 系统的编程需求。FLOW 的特性包括:
- 基于行业标准的车队集成工具包,包括 Restful、SQL、Rabbit MQ 和 ARCL
- 根据重要程度对任务进行优先排序
- 根据人类和机器人的交通,识别和选择最快的路线
- 识别受阻的路径并分配给替代路径
- 优化 AMR 作业分配
- 优化电池充电时间表,最大限度地延长车队的正常运行时间
- 仿真能优化 AMR 车队
甚至在 EM2100 网络设备部署到车队管理之前,Fleet Simulator 软件就能让用户为自主移动机器人车队规划交通和工作流程,并帮助识别和解决潜在问题。通过 Omron 的 Fleet Simulator,即可基于实际设施地图对 AMR 定位、路径规划、避障、任务仿真和车队管理进行精确建模。此外,仿真可以用来优化 AMR 车队的组成并预测吞吐量。EM2100 可以在工厂配置为 Fleet Simulator,也可以在现场通过软件更新配置为 Fleet Simulator。
AMR 健全性
一旦进场,AMR 预计将几乎连续运行,而预防性维护可能是成功部署的一个关键因素。为了支持这一需求,Omron 提供了 Wellness Visits,包括对各个 AMR 的状况进行定期的设施内评估,以便提前安排维修,将昂贵的停机时间降到最低。Wellness Visits 的好处包括:
最大限度地提高 AMR 工作寿命
保持 AMR 的峰值工作效率
提前发现潜在问题,尽量减少意外停机时间
根据预计关断和其他业务考虑,主动安排维修和零件替换
结语
AMR 可用于拾取和放下材料,让人们有更多的精力来执行复杂的增值任务,以提高仓库操作、制造流程和工作流程的效率和生产力。随着使用 AMR 的任务种类增加,新的 AMR 版本也被开发出来,从而使 AMR 车队的管理更加复杂。管理 AMR 车队首先要在启动车队之前,在合成环境中仿真 AMR 的交互。一旦车队部署完毕,AMR 必须安全、高效地工作,并尽量减少停机时间。提供的集中硬件和软件设备可用于仿真潜在的 AMR 部署,以及监测 AMR 车队的安全、高效和可靠运行。
-
Labview My RIO 移动机器人2016-08-21 13635
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4136
-
基于LPC2119的自主式移动机器人设计方案2020-05-11 2195
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 3807
-
如何实现移动机器人的设计?2020-11-23 3313
-
什么是移动机器人软硬件系统问题2021-08-06 2519
-
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现2023-06-28 2167
-
盘点自主移动机器人的常见问题2020-08-06 1874
-
上海工博会正式发布了业内首份自主移动机器人AMR产业发展蓝皮书2020-09-25 3524
-
2024年自主移动机器人将超过110万台2020-11-09 1389
-
仓库和工业自主移动机器人2022-12-30 1674
-
2023年度AMR自主移动机器人三大趋势预测2023-01-15 3243
-
「车型分析」移动机器人控制系统典型应用车型 ——叉式移动机器人(AGV/AMR)2023-06-05 2865
-
电源与电机控制方案如何更好应用于自主移动机器人?2023-09-05 1797
-
自主移动机器人(AMR)功能和特点2024-02-28 3542
全部0条评论

快来发表一下你的评论吧 !
