

怎样设计一台基于单片机的智能装载运输工程车
控制/MCU
描述
题目要求
设计一台智能装载运输工程车,要求能夹持物体,将物体从A地送往B地,同时车身搭载多款避障传感器,能自己规划线路,供电采用锂电池供电,使用自己设计的车模,不得购买成品。
题目分析
题目要求并不是很难,目前市面上有很多类似的避障小车,但是还没有这种运输的小车,尤其还需要夹物体,我们需要考虑到机械结构,车体我打算使用铝合金板打造,电机采用12V直流电机,扭矩大,电池采用3节18650锂电池。
对于避障,采用多款传感器,以达到题目要求。
总体设计方案
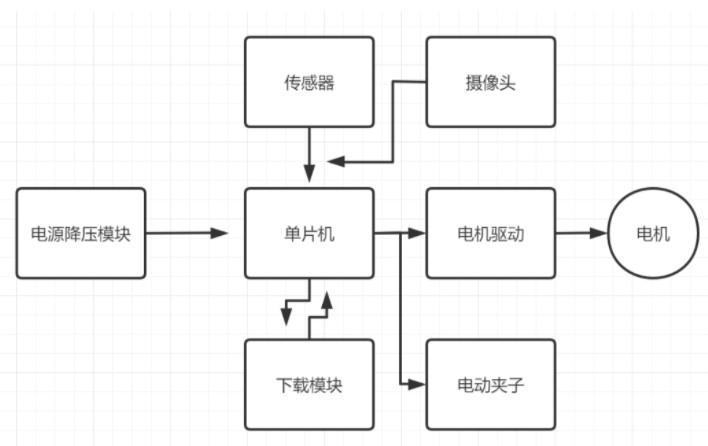
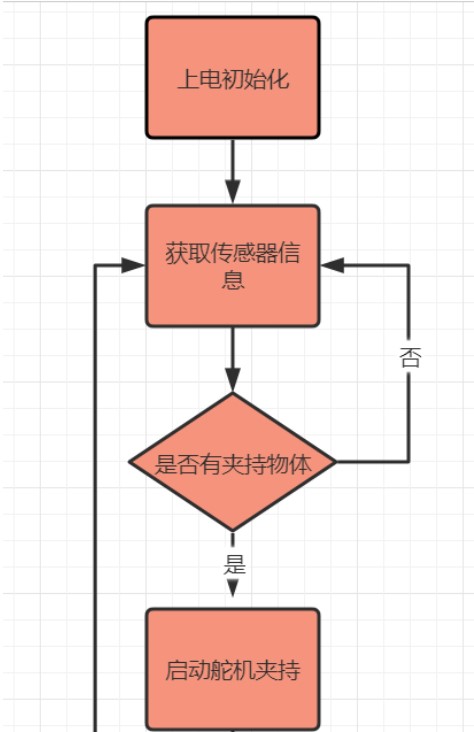
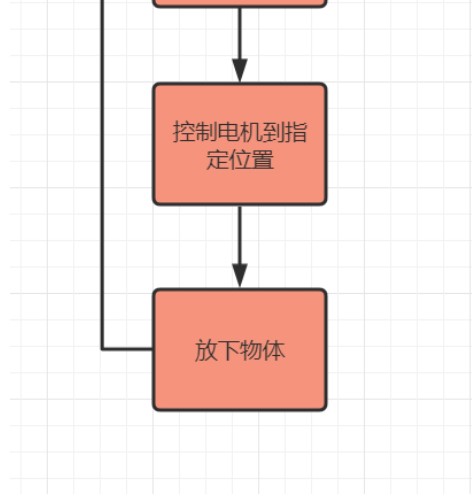
设计方案首先是电池降压让单片机能以一个稳定的电压工作,同时单片机外围集成了TTL下载器,方便我们调试的程序下载,单片机通过电机驱动,驱动电机控制小车上下左右移动,传感器和摄像头将避障的信息发给单片机做处理。
当识别到可夹持物体单片机再控制舵机夹子夹住物体。
总体设计方案
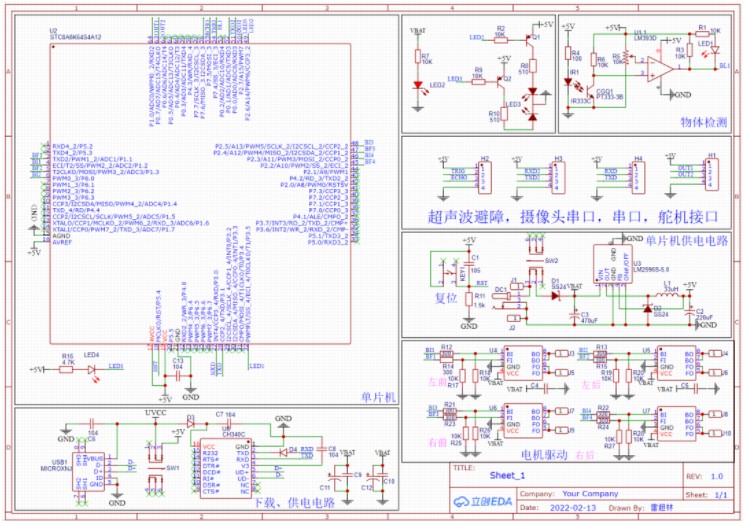
原理图设计
单片机电路
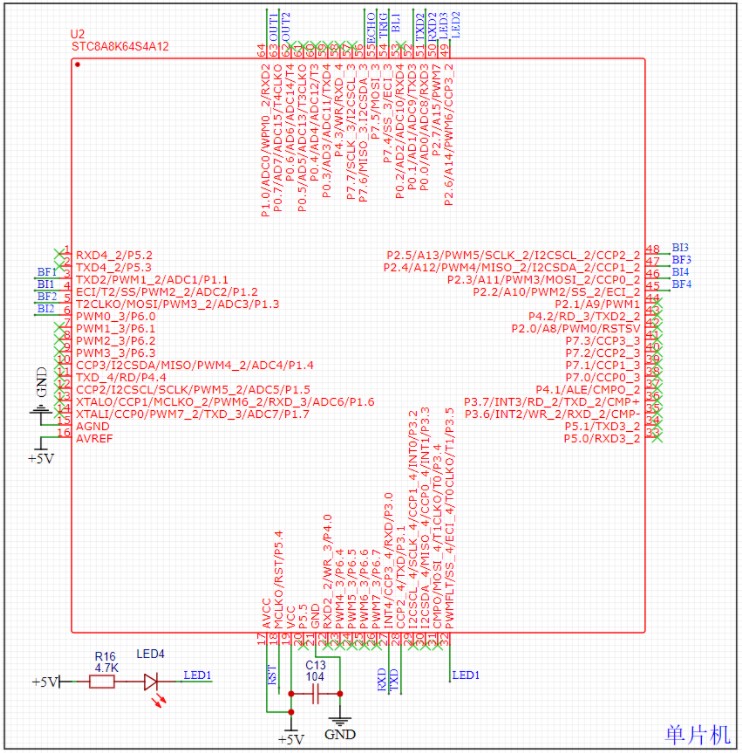
本系统采用的是STC的8A8K64S4A12单片机,编程简单,支持3.3V-5V供电。
贴片封装,占板体积小,引脚功能强大。但由于STM32的价格太贵,我们在STC和STM32之间选择了STC的8A系列,功能并不比STM32的要差,支持国产!
物体检测电路
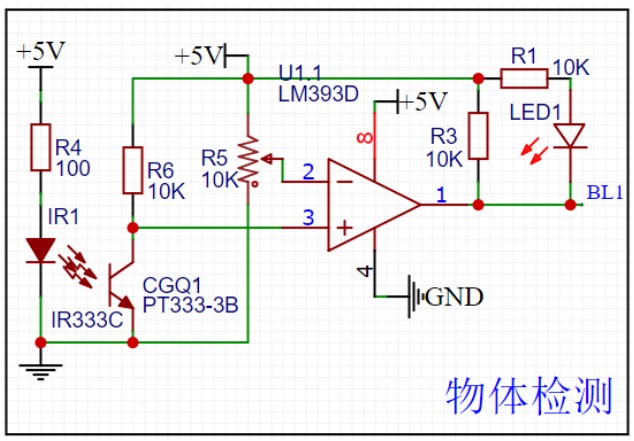
物体检测电路是利用了一个红外发射管和一个光电三极管以及外围比较电路,红外发射管发出红外不可见光,当外部没有物体时,红外光发散出去,光电三极管不导通,当物体遮挡时,光电三极管导通。
通过LM393做比较,输出一个高电平,从而检测是否有物体在前方,R5可调电阻的作用是调节灵敏度,防止误触。
外设电路
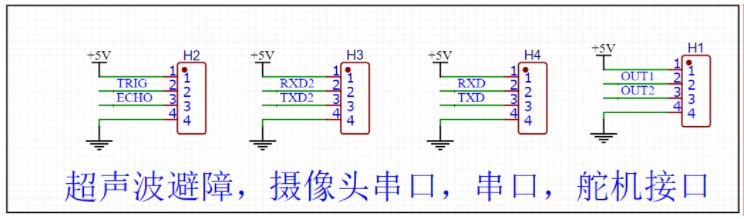
外设采用了超声波测距,摄像头循迹,以及夹子舵机接口,外设丰富,满足多种要求。
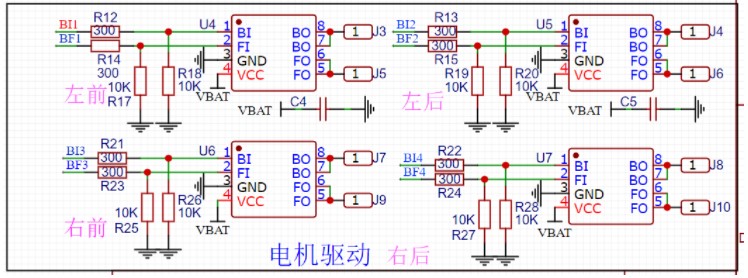
电机驱动电路
电机驱动电路采用了4片RZ7899电机驱动芯片,控制4个轮子RZ7899 是一款 DC 双向马达驱动电路,它适用于玩具等类的电机驱动、自动阀门电机驱动、电磁门锁驱动等。
它有两个逻辑输入端子用来控制电机前进、后退及制动。
该电路具有良好的抗干扰性,微小的待机电流、低的输出内阻,同时,他还具有内置二极管能释放感性负载的反向冲击电流。
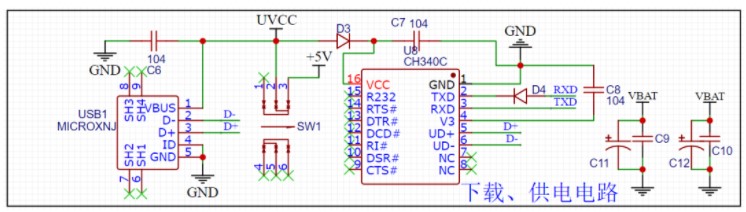
USB转TTL电路
CH340 是一个 USB 总线的转接芯片,实现 USB 转串口或者 USB 转打印口。
在串口方式下,CH340 提供常用的 MODEM 联络信号,用于为计算机扩展异步串口。
特别注意的是CH340芯片支持 5V 电源电压或者 3.3V 电源电压:
当使用 5V 工作电压时,CH340 芯片的 VCC 引脚输入外部 5V 电源,并且 V3 引脚应该外接容量为 0.1uF 的电源退耦电容;
当使用 3.3V 工作电压时,CH340 芯片的 V3 引脚应该与 VCC 引脚相连接,同时输入外部的 3.3V 电源,并且与 CH340 芯片相连接的其它电路的工作电压不能超过 3.3V。
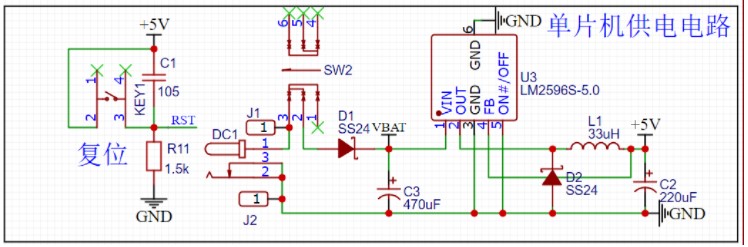
单片机复位及供电电路
单片机复位电路的原理是过给单片机RESET引脚20us的高电平时间。
单片机的供电以及设备供电采用的是LM2596固定电压输出,采用DC-DC降压的好处是:由于我们小车采用的是电池供电,电能的充分利用是我们提高续航的重要方法。
LM2596的效率最高可到90%,大大的为我们节约了电池的能量,提高我们的续航。
电池采用了三节18650电池,充满电压是14.7V,由于摄像头的功率较高,所以我们不能使用7805。
原理图展示
软件流程图
代码说明
软件代码篇幅较大,本编在这里不以展示,需要的小伙伴自行从原工程获取。
特别说明:
代码是舵机控制和摄像头的部分代码,尤其是在小车运动的时候,一定要把速度降低,也就是降低我标红的那个占空比,否则会让电机寿命变短。
注意事项
硬件上注意:
锂电池短路非常的危险,我们要注意锂电池的保存及使用。
在电机输出端要并联电容,否则容易烧驱动芯片,重则烧毁单片机!
调试的时候要注意电机的正负极,同时焊接的时候不要焊太多锡了,可能会造成板子的短路。
同时上电之前要检测板子是否有短路的情况,否则后果自负!
软件上注意:
一定要接对摄像头和单片机的串口接线,否则烧坏摄像头概不负责,先下载好摄像头的程序,再下载小车的,最后最装机。
由于摄像头和电机的功率较大,大家一点要记得充电。
摄像头采用的是H750的OPENMV。
审核编辑:刘清
-
制造一台***的挑战和瓶颈介绍2023-02-07 4529
-
如何使用单片机制作一台简易的测谎仪2021-11-19 1369
-
如何设计一个基于51单片机的智能小车2021-11-18 1823
-
怎样去设计一种基于AVR单片机的两轮自平衡智能车2021-09-24 1549
-
怎样去设计一种基于AVR单片机的无线语音遥控智能车2021-09-22 2082
-
基于单片机的智能车设计2021-09-02 1211
-
智能车教程单片机原理及应用2021-07-14 1112
-
基于51单片机的智能车云台程序2020-11-17 1033
-
有趣的塑料工程车2018-10-15 3244
-
基于单片机的DSP在线装载设计应用2017-09-21 637
-
基于HOLTEK单片机的智能车2014-05-17 3501
-
DIY一台实用的51单片机编程器2012-08-15 4160
-
基于AVR单片机视觉智能寻迹车设计与实现方案2010-04-23 3880
-
工程车辆自动变速技术研究2009-04-16 3140
全部0条评论

快来发表一下你的评论吧 !
