

如何打造一个AVAS系统
汽车电子
描述
电子发烧友网报道(文/周凯扬)在汽车电动化带来的绿色出行潮流下,不少安全问题也引起了人们的关注,这里说的不仅仅是自动驾驶,还有声音上的安全问题。市面上大部分电动车、混动汽车和插电式混动汽车几乎是无声的,只有当其速度达到20km/h左右,产生的风噪和道路噪声才能被人耳所听到,如果在低速行驶下没有车辆声音报警系统的话,行人很难发现从身边驶过的电动车。因此,低速行驶提示音系统(AVAS)成了不少汽车厂商和政策制定者考虑的问题。
主动声音设计的重要性
对于汽车厂商来说,汽车低速警示音这类系统也可以作为品牌形象的一个表达,就像各个车厂的喇叭、声浪或是手机厂商的铃声一样。但作为一项安全性的声学设计,需要考虑的方面还有很多,无论是分贝、频率等等,如何做到行人警示程度最高才是AVAS系统的最优先需求。厂商根据当地政策要求创建好AVAS声音的模型后,需要对其做各种测试和优化,完成认证后再进行部署。
与此同时,低速并不是这类系统需要考虑的唯一场景,同样关键的还有静止状态和倒挡。大家都知道电动车起步加速快,所以即便是静止状态下,电动汽车处于可行驶模式,一瞬间的启动也很有可能对车身旁边的人造成伤害,所以相关场景下也需要提供一定的警示音。
如何打造一个AVAS系统?
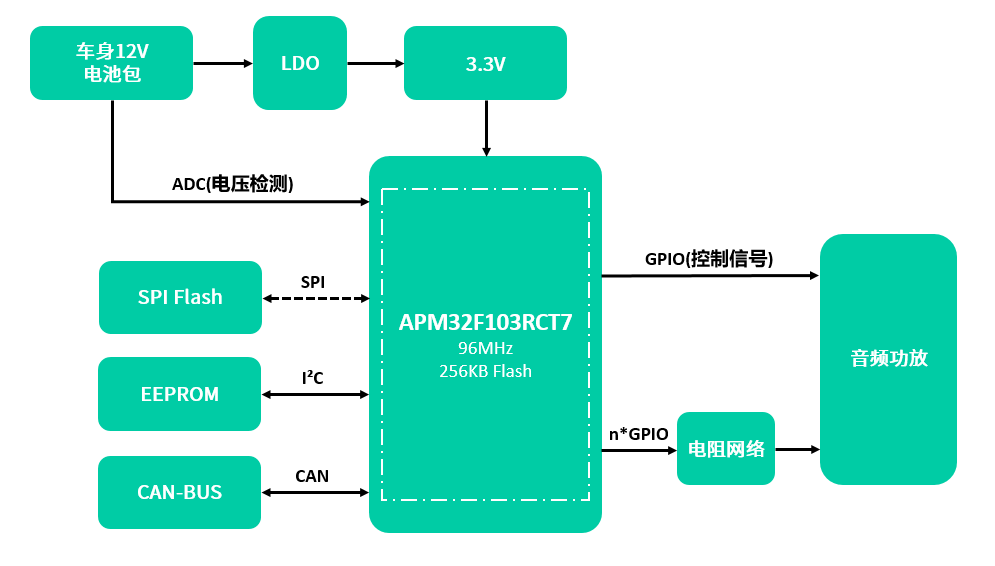
APM32F103RCT7 AVAS方案 / 极海半导体
其实打造一个AVAS系统并不难,只需要通过CAN总线获取车速等信息,将其发送给主MCU,MCU发送GPIO控制信号给音频功放,从而实现发出警示音。目前不少汽车通用MCU都有提供这类解决方案,比如意法半导体的SPC582B60E1以及极海半导体的APM32F103RCT7等。不过有汽车车身上不止一个警示音扬声器,设计者在开发该系统时也必须得保证声音能够覆盖整个车身外部。
虽然播放警报声对于车载MCU来说并不是什么复杂的工作,但依然为其带来了一定负载。如果MCU负载较高的话,设计者也可以选用单独的音频合成IC来完成,比如罗姆集团旗下蓝碧石半导体推出的ML2253x系列。与传统的MCU和放大器组合的方式不同,ML2253x已经集成了放大器,部分也已集成了闪存,所以几乎不需要其它外部元件就能实现AVAS所需的功能。
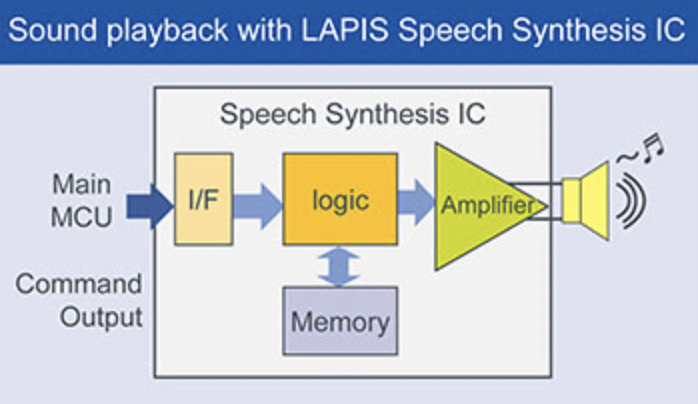
语音合成IC的AVAS方案 / 罗姆
在编程声音数据上,除了支持标准的板载ROM重写功能外,也可以选择用主MCU通过SPI/IF来完成数据重写,这样出货后也能实时改写音频数据,可通过一系列固件更新对汽车的AVAS提示音进行优化。
已经逐步落地的标准和法规
最后我们来聊一聊AVAS规范化的问题,过去几年中,其实已经出台了不少AVAS有关的标准,比如ISO 16254等等,而且各国各地区的法规也开始往强制AVAS上发展。比如在欧洲实施的UN/ECE R138,就规定2019年7月之后推出的电动和混动车,都必须配备AVAS系统,日本也同样采用了这一规范。
美国则也推出了相关法规FMVSS141,但两者在一些测试条件上存在差异,比如FMVSS141并没有对轮胎做出特殊要求,而轮胎本身也会造成测试结果的差异,尤其是在低速行驶的情况下。此外,UN/ECE R138对提示音的测试是允许在车内进行的,FMVSS141则必须在车外测试,而且必须采用实车测试,不接受仿真结果。
我国其实也制定了电动汽车低速提示音的相关标准,比如国家标准GB 7258-2017《机动车运行安全技术条件》中就提到:纯电动汽车、插电式混动汽车在车辆起步且车速低于20km/h时,应能给车外人员发出适当的提示性声响。虽然这是一个强制标准,但它只覆盖了起步场景,而且这个提示性声响明显在标准中是作为可选项的。
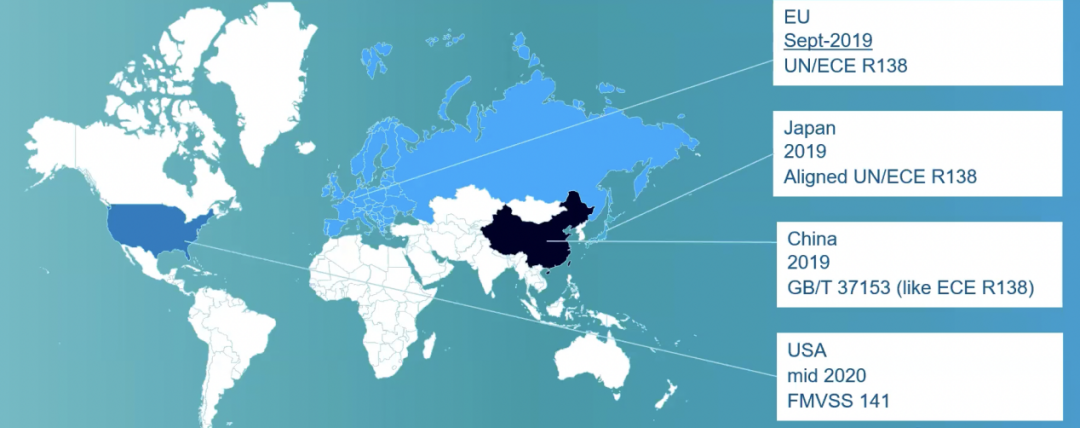
现有的AVAS法规分布 / 西门子
除此之外GB/T 37153-2018《电动汽车低速提示音》标准中提出,提示音系统的工作测速范围至少在包含0~20km/h这个范围,至于车辆完全静止但处于可行驶状态是否发声由厂商自己来决定。虽然这一标准完善了在电动汽车在低速行驶下的声音提示规定,但这一标准目前仍只是推荐性标准,是否强制启用还是看厂商自己的选择。
依笔者的看法,目前不少汽车的ADAS系统已经集成了行人避障系统,比如依赖短距的毫米波雷达和激光雷达等,但这样的安全策略与AVAS在实现方式上是不一样的。AVAS作为一项“被动”安全特性,如果不对其采取强制性规定,而是给到用户一个可开关的选项,甚至是默认关闭的状态,那么这对AVAS的普及并不能起到显著的作用,也没法真正让电动汽车摆脱低速行驶下的安全隐患。
-
APM32F103RCT7电动汽车AVAS(声学汽车警报系统)应用方案2022-07-11 3069
-
千亿美元打造一个系统,成本越来越高的AI超算2024-04-09 4716
-
三种方法 为内存打造散热系统2011-02-23 7660
-
如何打造一个基于单片机的“USB”密钥?2021-05-20 815
-
打造一个异构机器人平台2022-07-27 1948
-
求一种基于APM32F103RCT7电动汽车AVAS应用方案2022-10-10 2994
-
Facebook正在打造出一个全新的操作系统2019-12-20 3477
-
安防平台的建设就是在打造一个智能化系统2020-09-08 4476
-
打造自动驾驶控制系统需要多少个神经元?2020-10-30 2431
-
聚焦AVAS,为能源车的安全“发声”2022-09-16 2247
-
声学汽车警报系统( AVAS),新能源车的必备硬件2023-02-06 11675
-
汉得利低速提示音系统AVAS:提升电车道路行驶安全2023-06-02 4287
-
低速提示报警器-广州唯创电子WT2003H方案在AVAS领域的创新应用2025-04-10 1545
-
如何打造一个属于自己的手势识别应用2025-07-29 1394
-
STMicroelectronics AEKD-STEREOAVAS 立体声AVAS解决方案技术解析2025-10-23 861
全部0条评论

快来发表一下你的评论吧 !
