

通过电机和运动控制实现智能自动化
工业控制
描述
在生产成本越来越低的推动下,BLDC 电机越来越受欢迎。尤其是消费无人机和电动自行车的引入导致了 BLDC 电机的大规模生产 - 曾经专用于高端工业应用。同时,通过在硬件中提供磁场定向控制或矢量控制的即插即用构建块,曾经复杂的伺服驱动器的开发变得更加容易。虽然这种组合支持包括医疗和保健设备在内的一系列新应用,但我们不应忘记步进电机。
与伺服驱动器相比,步进电机在许多工程师看来似乎逊色。然而,步进电机控制已经从简单的“无需调整”控制方案走了很长一段路。当然,对于某些应用,您仍然可以轻松地驱动步进电机,但越来越多的高端应用依赖于步进电机在低速下提供的高扭矩。从实验室自动化到半导体处理和 3D 打印到 4K 监控摄像头,这些电机的机械特性使工程师能够在没有额外齿轮箱的情况下实现驱动系统。没有齿轮箱意味着更少的磨损、更少的噪音和更低的管理费用。
尽管以低成本提供鲁棒性和精度,步进电机仍然有噪音、引入振动和能源效率不高的声誉。过去使用的驱动程序解决方案的传统,根本不复杂。然而,与此同时,微步操作与复杂的电流斩波器甚至电压斩波器相结合,允许使用自适应电流实现平稳、无噪声的操作。添加诊断功能和无振荡的优势——意味着在静止时根本没有运动——你突然拥有了一个行业领先的解决方案,适用于需要完美运动控制的应用。对于那些需要闭环操作的应用,可以添加一个编码器,它可以是一个基于霍尔的组件,
就像过去二十年电机控制发生了变化一样,开发应用程序的普通工程师也发生了变化。如今,普通工程师希望专注于使他们的设备与众不同的原因,而不是开发看似复杂的驱动系统。具有最小外形尺寸、直观用户界面、实时功能、功能安全以及通过云收集和共享数据的时尚设计是工程师的新关注点。坦率地说,普通工程师甚至可能将电机和运动控制视为阻碍他的想法和概念的必要之恶。这就是为什么直观的开发套件是关键的原因。
不幸的是,用开发套件支持电机并不是那么容易。原因很简单:每个电机都不同。电机参数不同,极数不同,反馈系统(如果有)也不同,并且电机可能需要针对特定用例进行优化和微调。这甚至没有考虑到也需要考虑的各种外部接口。因此,“一刀切”的解决方案通常由带有特殊电机控制库的微控制器和通用驱动板组成,这种解决方案是行不通的。变量实在是太多了。
这就是为什么 TRINAMIC Motion Control(现在是 Maxim Integrated 的一部分)提供广泛的开发板作为其模块化评估系统的一部分的原因,也是该公司在软件、工具和向导上投入大量资金以支持该系统的原因。这些板允许快速设置原型应用程序,因此普通工程师可以尝试不同的设置并微调实现他们的想法所需的驱动系统。一旦设置适合他们独特的用例,就可以轻松地以 C 语言编译和导出代码,以直接在他们自己的固件中使用。至于硬件,开发板是在 MIT 许可下经过验证的开源设计,这意味着它们可以免费使用而无需共享结果。
因此,无论是直接复制还是(部分)用于新设计,模块化评估套件都经过优化以缩短设计周期并使电机和运动控制变得像 1-2-3 一样简单,符合 Trinamic 的愿景。他们的基准不是其他半导体公司提供的解决方案。相反,他们的基准是为公司提供复杂而直观且随时可用的解决方案,将数字信息转化为完美的物理运动,因为这是当今工程师所期望的,因此他们可以专注于他们的核心专业知识。
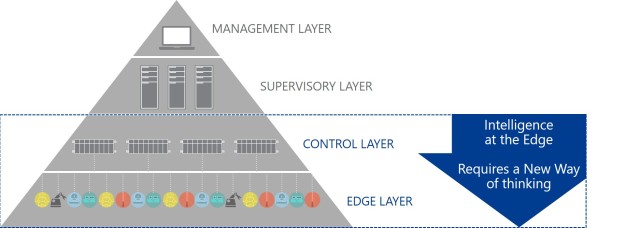
图 1:管理层
对于电机和运动控制的未来,与最终可靠性需求相关的日益复杂性将导致系统更加智能——这需要处于边缘,分散。需要实时做出决策,需要在源头收集数据并在云中共享。第二个大趋势是功能安全,这是机器人从笼子里释放出来并与人类并肩工作的逻辑结果,无论是作为协作机器人还是独立机器人,从拾放设备到真空吸尘器。为了实现这些趋势,需要开发新的硬件,从实时关键任务中卸载处理器,同时支持更多的诊断、预测性维护和人工智能,并支持功能安全的系统。
-
如何实现PLC的自动化控制逻辑2024-06-15 3481
-
运动控制与自动化PLC过程控制的区别2024-06-07 4212
-
集成机器视觉与运动控制的高速工业自动化应用2023-10-07 627
-
过程自动化控制和运动自动化控制的原理详解2023-09-25 2995
-
基于机器视觉和运动控制的工业自动化介绍2023-09-19 885
-
精密运动控制实现自动化2023-01-05 2124
-
Trinamic运动控制满足工业自动化2022-09-06 4899
-
精密运动控制如何帮助实现自动化2021-10-19 3158
-
电机自动化控制2021-08-02 4141
-
如何实现智能电网自动化?2019-09-17 2772
-
印度国际自动化展2018-03-02 4689
-
自动化控制装置2018-02-05 4371
-
基于机器视觉和运动控制的工业自动化2012-08-03 4604
全部0条评论

快来发表一下你的评论吧 !
