

GMR 技术可节省汽车的燃油经济性
汽车电子
描述
汽车行业继续推动更高效的燃料消耗和减少二氧化碳排放。GMR(巨磁阻)技术提高了性能并扩展了现有霍尔解决方案的运行能力。
GMR 传感器(磁阻效应磁场传感器)的特点是对磁场的响应与频率无关。因此,有可能以 kHz 数量级的发生率获得良好的灵敏度和最大输出信号。
GMR技术
GMR 技术利用了在各种铁磁多层中观察到的量子磁阻力学。由于 Albert Fert 和 Peter Grunderb 的研究,这项研究获得了诺贝尔奖。
该效应显着改变了电阻,具体取决于相邻铁磁元件的磁化。通过施加外部磁场来组织磁化方向。结果是电子对旋转方向的散射依赖性。
以下公式描述了磁阻:
其中 R (H) 是样品在磁场 H 中的电阻,R (0) 对应于 H = 0。该表达式的替代形式可以使用电阻率而不是电阻。
基本原理取决于电子的旋转。在磁阻器中,电子散射速度随着电子自旋和介质磁取向的相互作用而变化,电子在其中传播——GMR 换能器的电阻在磁场存在时发生变化。
GMR 传感器特别有希望开发创新的混合传感器模型,以通过电磁手段检测和表征导电多层膜中的地下不连续性。这些混合传感器集成了一个传统线圈,它在被测材料中产生交变磁场,以及一个 GMR 传感器作为检测元件,检测由于相互作用而产生的磁场干扰。
与霍尔效应技术一样,GMR 与信号调节电路整体结合。输出信号大于霍尔信号,具有更高的信噪比和更低的输出信号抖动。这些特性使 GMR 传感器能够检测更远距离的物体。
评估 GMR 传感器选择的主要特征包括几个重要因素。首先,最重要的考虑是易于设计,“解决方案必须是一个完全集成的模块,包括磁铁和保护组件,以在用户完成的传感器设计中实现最佳性能。包含磁铁和 EMC 保护显着简化了 GMR 传感器的设计,”Allegro 的发言人说。第二个考虑因素是外部磁场干扰及其干扰输出信号的能力。“通过使用差分传感技术消除了共模场。但是,共模场以外的杂散场会干扰磁传感器的输出信号,需要在设计过程中加以考虑,”产品线经理 Christine Graham 说,
主要的设计考虑是优化磁路以通过 GMR 技术实现卓越的性能,因此,这就是原因。这是必须的,由 GMR IC 供应商完成。将 GMR IC 和磁铁设计为一个系统,最好由了解 GMR 设计的人员来完成。
变速器设计需要更小、更轻,以提高效率和燃油经济性。这对围绕速度传感器的安装位置和容差产生了显着的空间限制。解决方案是通过在更远的气隙下运行来提供更大的灵活性,而不会牺牲在更近的气隙下工作的前身部件的预期性能。
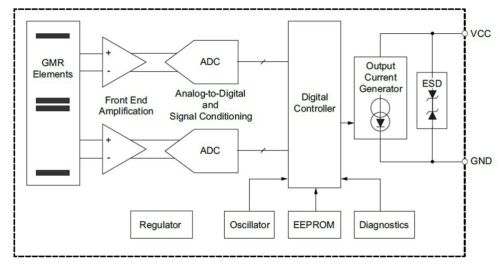
图 1:ATS19580 的功能框图
Allegro MicroSystems 宣布推出其 ATS19580,这是业界首款完全集成和逆向集成的巨磁阻传输方向和速度传感器 (GMR)。由于其高度集成,ATS19580 提供高抗振性并减小系统尺寸、复杂性和成本,从而节省燃料。Allegro 拥有领先数字处理能力的专有技术为传输速度传感设立了新标准。ATS19580 的功能简化了客户速度传感器的集成,使他们能够设计安全且省油的系统(图 1 和图 2)。
“在 GMR 传感器的设计过程中,最关键的部分是传感器的工作范围和信号精度。在较远的气隙下运行,但不允许我们的客户和汽车制造商在总有效气隙范围内有足够的容差,这不会被视为解决方案,因为它会增加设计如此精确的机械系统的成本。此外,必须不牺牲信号精度,因此需要保持动态气隙能力、抗振性和热梯度补偿。这些用于终端系统补偿的算法开发已经过去了二十年,”Christine 说。
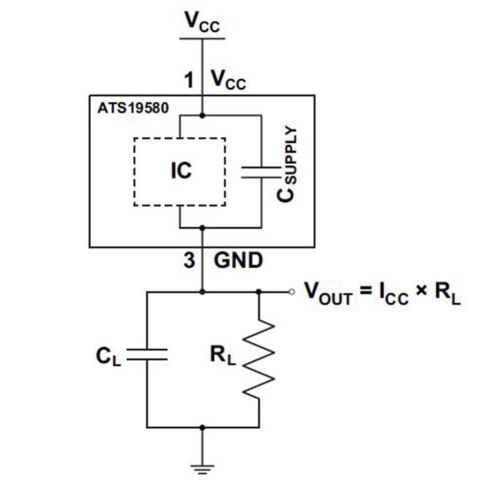
图2:ATS19580 GMR传感器典型应用电路
“传输是 ATS19580LSN 的目标市场。然而,任何根据速度、方向或脉冲计数确定的档位当然都可以从传感器的功能中受益。例如休闲车(即 UTV、雪地摩托、叉车等),”克里斯汀说。
霍尔和 GMR 技术
磁场检测使用 GMR 和霍尔效应传感器。这两种技术都与集成电路处理兼容。
磁阻传感器提供的灵敏度高于霍尔传感器。GMR 传感器的灵敏度可通过选择薄膜厚度和线宽进行调节。相反,霍尔效应有利于没有饱和效应的高线性测量,直至极高的场强(图 3)。
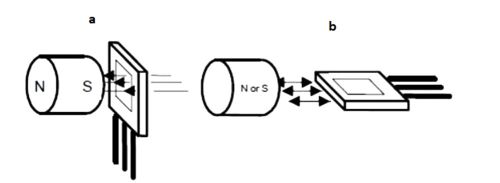
图 3:霍尔 (a) 和 GMR (b) 传感器布局
霍尔效应传感器可以检测垂直磁场,而磁阻传感器可以检测平行磁场。因此,GMR 传感器由单极传感组成,用于精密、非接触式位移应用,例如医疗分析仪和磁场编码器。然而,霍尔效应传感器确定齿轮齿的接近度作为 CNC 机床并测量传输速度。
驾驶辅助系统 (ADAS) 在灵敏度方面需要更高的准确性和可靠的系统。巨磁阻 (GMR) 是满足这些高级要求的有力候选者,它取代了霍尔效应作为传感传感器。原则上,GMR 和霍尔都是磁传感器,但两者在基本操作和能力上有所不同。
基于霍尔的磁感应场的最小微分值小于 30 高斯,而 GMR 技术可低至 5 高斯。GMR 需要更严格的设计条件,并提供定义的线性范围,在 100 高斯范围内具有理想的峰峰值磁信号幅度。
一般来说,所有设备都可以在磁性设计范围之外运行而不会造成永久性损坏。但是,根据信号处理算法的不同,性能可能会下降。在 GMR 传感器中,这种退化可能会以更高的成本发生。
审核编辑 黄昊宇
-
摩托车动力经济性的计算机模拟及其传动系的优化2009-12-02 3141
-
浅谈天然气在供暖工程中的经济性2010-03-18 3565
-
电动汽车会取代燃油汽车吗?2019-05-13 2905
-
传感器在汽车电子的重要性2019-07-22 2121
-
安森美半导体着力汽车重点应用领域2020-05-04 3329
-
怎么实现自制虚拟仪器的可行性、经济性、快速性和便携性?2021-04-15 1188
-
电动车辆采用无级变速器速比控制对燃油经济性的改进2009-04-07 515
-
如何看汽车油耗,应该怎么算2010-03-10 15436
-
电力系统调度经济性评价2018-01-30 1134
-
油混汽车相比于燃油车的优势是什么2019-08-07 2131
-
GMR技术节省汽车燃料2022-07-27 2127
-
理论仿真分析基本流程和动力性经济性关键评价指标2022-11-01 3831
-
显示燃油经济性的复古电脑2023-05-22 1669
-
悟境AI教练: 跑步经济性,决定你的长跑成绩2022-06-14 2107
-
浅谈医疗用电设备配电系统设计及经济性分析2024-08-06 2968
全部0条评论

快来发表一下你的评论吧 !
