

传统的伺服驱动器存在的问题
工业控制
描述
前言
为了提高生产力和优化物流,越来越多的公司实现了内部物流的自动化。因此自动导引运输车 (AGV) 到自主移动机器人 (AMR)出现在大家的视野里,工厂车间和仓库正在发生变化。
然而,初始投资和安全问题仍然阻碍了 AGV 或 AMR 的广泛采用。Trinamic久经考验的设计为运动控制设定了性能标准,工程师可以解决这些问题并轻松集成高级诊断和安全功能,而无需额外成本。受益于即插即用构建块,使运动控制像 1-2-3 一样简单。
什么是AGV小车
AGV小车分为很多种,我们称之为搬运机器人,其用途及功能也是十分的广泛,在一般大型物流仓库中我们可以看到,有普通的AGV小车,其有着自动导航定位,负责搬运货架或者货物到指定位置;
有智能型的叉车式AGV,自动检测及强大的搬动功能,它主要负责搬动较多并且已经叠放整齐的物品;
还有复合型AGV,在移动的AGV小车上加上了一个机械臂,能够识别物品,负责货物品的分拣及搬运。
面临的挑战
由于设备的特殊性,AGV小车在运动过程中涉及到人生安全、仓储运行碰撞安全以及货物安全等原因,所以它必须要有一个高精度的定位、运行及轨迹运行控制系统。那么要实现这一点,必须有一个可靠、高精度的伺服控制器来实现这一套轨迹运行。
安全性极高的运动控制系统,绝大多数情况下首选为伺服驱动器。但是传统的伺服驱动器存在的问题是什么呢?我们将它为三个部分:
体积大、价格昂贵
安装与操作极其复杂,给AGV的研发与生产带来了不少的阻碍。
复杂的伺服算法,特别是想要自主研发传统的伺服控制器,而伺服算法,则是一座难以难以逾越的大山。
Trinamic带来的方案
为了应对这一难题,Trinamic推出了一个专门针对小型化、低成本化及完整的运动控制方案。Trinamic结合自身的运动控制多年的经验,TMC4671运应而生,它的特点是完美地解决FOC软算法无法被一般的企业掌握的难题,提供了一个简单的解决方案,能够让您在短时间内搭建一套完美的伺服工作系统。
TMC4671
TMC4671是一个纯FOC芯片,可为BLDC/PMSM提供磁场矢量控制,它提升了算法,电流环、速度环以及位置环的闭环。用户所要做的,就是通过简单的寄存器配置,然后直接给TMC4761发送力矩指令、速度指令或者位置指令,从而就无需再去面对复杂的算法。
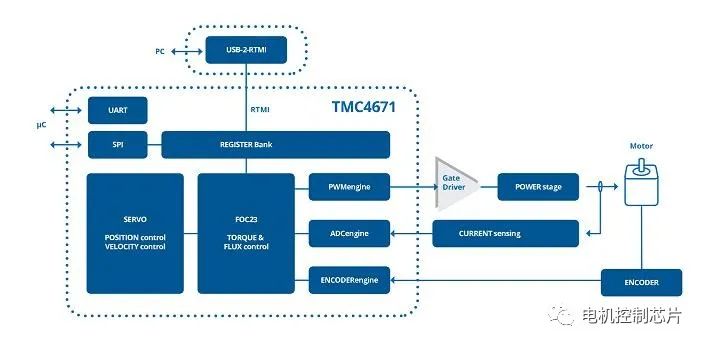
主要特性:
具有磁场定向控制的伺服控制器
转矩控制(FOC),速度控制,位置控制
前馈控制输入
集成ADC,delta sigma-ADC前端
编码器引擎:霍尔模拟/数字,编码器模拟/数字
支持3相PMSM/ BLDC,2相步进电机和直流电机
高级PWM引擎(25kHz 。.. 1000kHz)
应用程序SPI +调试(UART,SPI)
步进方向接口(S / D)
有哪些改进
小型化:驱动器模块化,让控制系统做到更小
性能方面:带有磁场矢量控制(FOC)
控制方面:内置算法控制,配置寄存器,控制更简单
控制功能方面:集成了ADCs、位置传感器接口、位置差值器
成本优化方面:更简单的研发低成本且经济高效的伺服控制系统
制造工艺方面:QFN76 (10.5×6.5)
总结
TMC4671是一个完美解决了伺服算法的芯片,只需通过简单的力矩、速度和位置指令,再结合常规的预驱和MOS管,就能够实现一套高性能、完整的伺服控制器。
-
如何调试伺服驱动器2024-11-04 3701
-
伺服驱动器和伺服电机介绍2024-10-04 2702
-
伺服驱动器需要设置哪些参数2024-07-13 10782
-
伺服驱动器过载怎么处理恢复2024-06-06 7304
-
伺服驱动器和伺服控制器的区别2024-06-05 5605
-
伺服驱动器的作用与原理、应用领域2024-01-17 11726
-
伺服驱动器输出电压怎么测量2024-01-15 7100
-
伺服驱动器怎么设置参数2024-01-11 9099
-
伺服驱动器的常见接线方法2023-05-09 28889
-
伺服驱动器是什么?2022-12-02 4806
-
伺服驱动器的工作原理_伺服驱动器内部结构2019-10-07 56120
-
伺服驱动器怎样维修_伺服驱动器维修技巧2019-05-07 23356
-
伺服驱动器原理及选型2017-07-30 1911
全部0条评论

快来发表一下你的评论吧 !
