

 全志V853开发板--buildroot应用交叉编译
全志V853开发板--buildroot应用交叉编译
描述
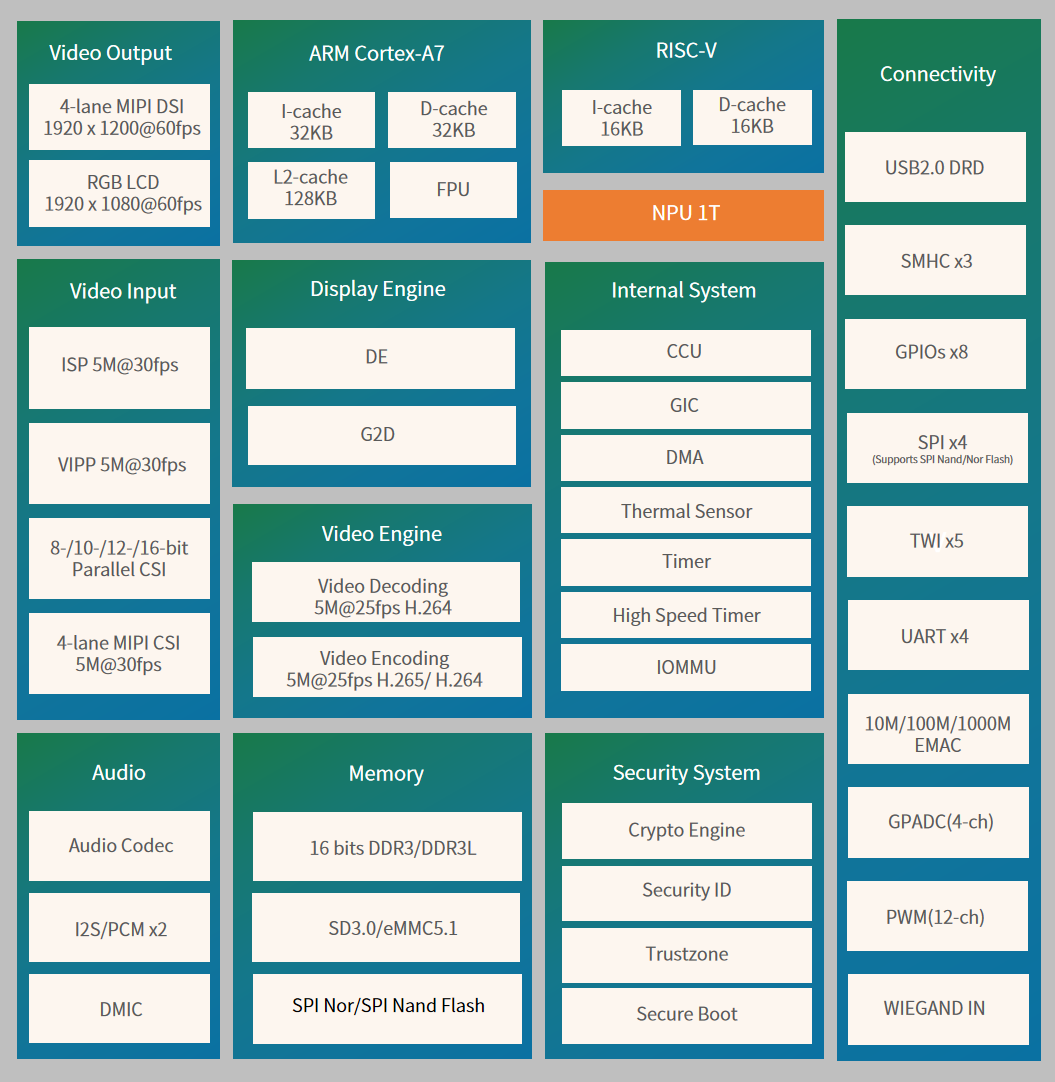
全志V853-高性能边缘AI视觉处理芯片

V853 是一颗面向智能视觉领域推出的新一代高性能、低功耗的处理器SOC,可广泛用于智能门锁、智能考勤门禁、网络摄像头、行车记录仪、智能台灯等智能化升级相关行业。V853 集成Arm Cortex-A7和RISC-V E907 双CPU,内置最大 1T 算力 NPU,使用全志自研 Smart 视频引擎,最大支持5M@25fps H.265编码和5M@25fps H.264编解码,同时集成高性能 ISP 图像处理器,可为客户提供专业级图像质量。V853 还支持 16-bit DDR3/DDR3L,满足各类产品高带宽需求;支持 4lane MIPI-CSI/DVP/MIPI-DSI/RGB 等丰富的专用视频输入输出接口,满足各类AI视觉产品需求;采用先进的22nm工艺,具有更优的功耗和更小的芯片面积。
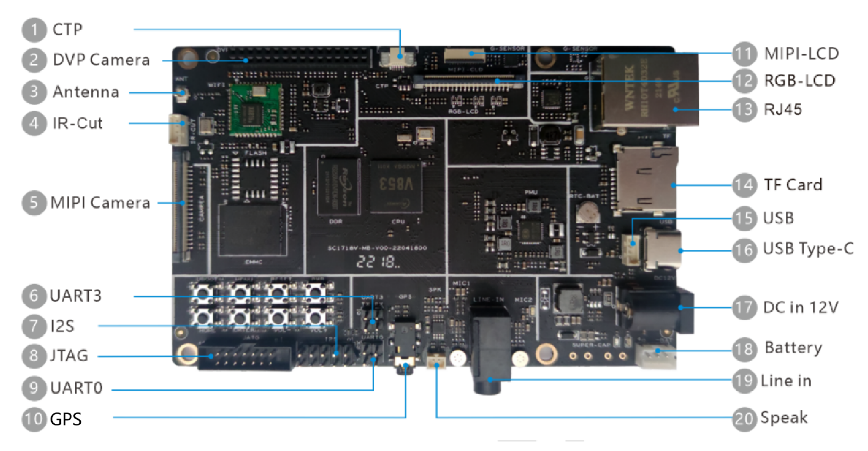
全志V853开发板介绍
- 很荣幸能第一手拿到全志V853的开发板。接下来开始介绍介绍这款开发板。
- 全志V853开发板规格参数:
| 类型 | 说明 |
|---|---|
| 主控 | 全志V853 (Arm A7 1GHz + RISC-V E907 600MHz + 1T NPU) |
| DDR | 512MB DDR3 |
| Memory | 8GB eMMC |
| 无线网络 | 2.4G WiFi/BT(型号:全志XR829模组) |
| 有线网络 | 100Mbps以太网 |
| 摄像头 | 1080P双目摄像头 |
| 屏幕 | 7寸 LCD屏幕 |
| 麦克风 | 模拟麦克风 *2 |
| DEBUG | 支持uart串口调试,支持ADB USB调试 |
| USB | Type-C USB * 1, 同时支持供电和数据传输 |
| PMU | 全志AXP2101 |
- 全志V853系统配置:官方支持Tina Linux 5.0系统,基于Linux4.9内核和uboot-2018。其中:
- Tina Linux 是全志科技基于Linux内核开发的针对智能硬件类产品的嵌入式软件系统。
- Tina Linux v5.0 中包含 Linux 系统开发用到的 boot 源码、内核源码、驱动、工具、系统中间件与应用程序包。可以方便的定制、编译、打包生成Linux固件镜像。
- Tina Linux v5.0 可以支持构建 openWrt 和 buildroot 不同构建系统;也支持单独编译 BSP(Board Support Package,板级支持包);能够打包生成固件包,烧录到相应设备中并运行。
- 全志V853开发板的硬件外设
全志V853--交叉编译
-
为啥要写交叉编译呢?是因为全志提供的文档中描述的OpenWRT的构建方式,而我采用的buildroot进行构建。他们两者采用的交叉工具链是不一样的。其中:OpenWRT采用musl工具链,而buildroot采用的glibc工具链。
-
为了避免其他人采用buildroot也按照文档进行操作,导致应用编译完无法运行起来。所以我补充一下buildroot构建中,应用的交叉编译。
-
编写HelloWorld:
#include
int main(void)
{
printf("Hello World!");
return 0;
}
- V853的编译工具链的路径:prebuilt/rootfsbuilt/arm/。里面包含了两个工具链:musl和glibc,而buildroot采用了glic。
- 所以gcc编译器的路径:prebuilt/rootfsbuilt/arm/toolchain-sunxi-glibc-gcc-830/toolchain/bin/。而编译是需要用到的库文件和头文件路径:prebuilt/rootfsbuilt/arm/toolchain-sunxi-glibc-gcc-830/toolchain/arm-openwrt-linux-gnueabi/
- 指定存放交叉编译需要使用的库文件头文件的文件夹
v853@v853:~/$ export STAGING_DIR=~/v853/tina-v853/prebuilt/rootfsbuilt/arm/toolchain-sunxi-glibc-gcc-830/toolchain/arm-openwrt-linux-gnueabi/
- 编译应用程序:
v853@v853:~/$ export STAGING_DIR=~/v853/tina-v853/prebuilt/rootfsbuilt/arm/toolchain-sunxi-glibc-gcc-830/toolchain/bin/arm-openwrt-linux-gcc -o helloworld main.c
v853@v853:~/$ ls
helloworld main.c
v853@v853:~/$
- 我是采用挂载SD卡的形式将应用程序拷贝到板子的。所以将编译好的应用程序helloworld拷贝到SD卡。
- 板子上验证结果:
// 挂载SD卡到test目录上
# mount /dev/mmcblk1 /mnt/test/
// 运行应用
# ./helloworld
Hello World!#
欢迎关注微信公众号『Rice嵌入式开发技术分享』
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
全志V853开发板原理图2024-01-12 5609
-
全志v853参数 v853和v853s的差别 全志v853是什么封装的2023-08-21 7613
-
全志V853开发板双目摄像头模组原理图202206242022-10-19 1385
-
5分钟开启全志V853平台GUI “Hello World!”之旅2022-10-11 3178
-
【全志V853开发板试用】编译 Tina Linux部分之buildroot 编译2022-09-01 2612
-
【全志V853开发板试用】全志V853开发板试用测评报告2022-08-29 4532
-
全志V853开发板试用之一(Tina Linux 5.0编译 和NPU使用)2022-08-21 11467
-
【免费试用】全新Tina Linux v5.0释放,价值1799元V853开发板等你来拿!2022-07-24 2932
-
全志V853开发板参数规格概述2022-07-22 7496
-
【免费试用04期】全志V853开发板试用活动2022-07-21 26453
-
带大家来一次全志V853开发板沉浸式开箱!2022-07-04 2194
-
全志V853开发板发布!开发板试用同步开放申请!2022-07-01 3584
全部0条评论

快来发表一下你的评论吧 !
