

SPI总线协议和I2C总线协议
接口/总线/驱动
描述
目录:
- 一、SPI总线协议
- 1、什么是SPI
- 2、技术性能
- 3、接口定义与硬件连接
- 4、内部结构
- 5、传输时序
- 二、I2C总线协议
- 1、I2C总线协议
- 2、程序
- 三、存储器的分类
一、SPI总线协议
1、什么是SPI
SPI,是英语Serial Peripheral Interface的缩写,顾名思义就是串行外围设备接口。SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议。
SPI是一个环形总线结构,由ss(cs)、sck、sdi、sdo构成,其时序其实很简单,主要是在sck的控制下,两个双向移位寄存器进行数据交换。
上升沿发送、下降沿接收、高位先发送。
上升沿到来的时候,sdo上的电平将被发送到从设备的寄存器中。
下降沿到来的时候,sdi上的电平将被接收到主设备的寄存器中。
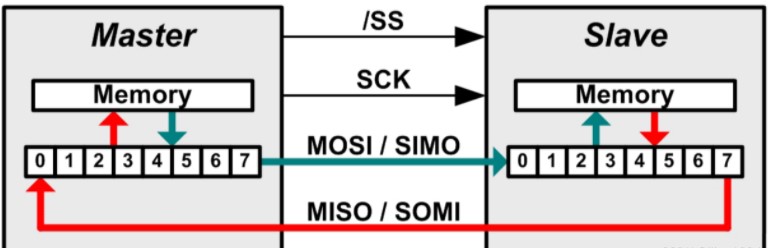
假设主机和从机初始化就绪:并且主机的sbuff=0xaa (10101010),从机的sbuff=0x55 (01010101),下面将分步对spi的8个时钟周期的数据情况演示一遍(假设上升沿发送数据)。
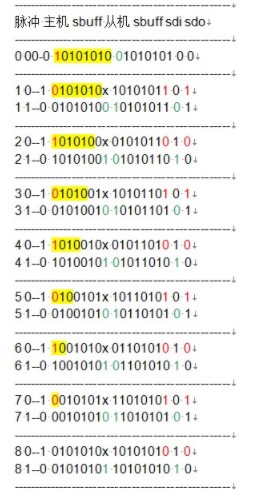
这样就完成了两个寄存器8位的交换,上面的0--1表示上升沿、1--0表示下降沿,sdi、 sdo相对于主机而言的。根据以上分析,一个完整的传送周期是16位,即两个字节,因为,首先主机要发送命令过去,然后从机根据主机的命令准备数据,主机在下一个8位时钟周期才把数据读回来。
SPI总线是Motorola公司推出的三线同步接口,同步串行3线方式进行通信:一条时钟线SCK,一条数据输入线MOSI,一条数据输出线MISO;用于 CPU与各种外围器件进行全双工、同步串行通讯。
SPI主要特点有:可以同时发出和接收串行数据;可以当作主机或从机工作;提供频率可编程时钟;发送结束中断标志;写冲突保护;总线竞争保护等。
SPI总线有四种工作方式(SP0, SP1, SP2, SP3),其中使用的最为广泛的是SPI0和SPI3方式。
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果 CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。 SPI主模块和与之通信的外设时钟相位和极性应该一致。
SPI时序图详解-SPI接口在模式0下输出第一位数据的时刻
SPI接口在模式0下输出第一位数据的时刻
SPI接口有四种不同的数据传输时序,取决于CPOL和CPHL这两位的组合。图1中表现了这四种时序,
时序与CPOL、CPHL的关系也可以从图中看出。
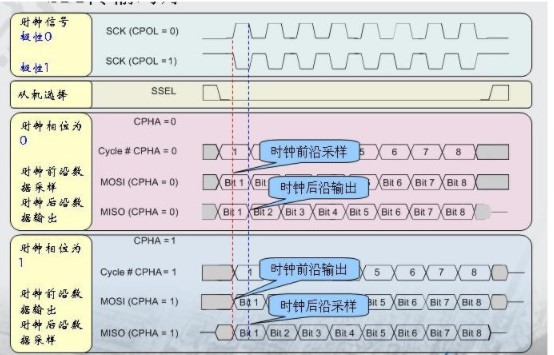
图1
CPOL是用来决定SCK时钟信号空闲时的电平,CPOL=0,空闲电平为低电平,CPOL=1时,
空闲电平为高电平。CPHA是用来决定采样时刻的,CPHA=0,在每个周期的第一个时钟沿采样,
CPHA=1,在每个周期的第二个时钟沿采样。
由于我使用的器件工作在模式0这种时序(CPOL=0,CPHA=0),所以将图1简化为图2,
只关注模式0的时序。
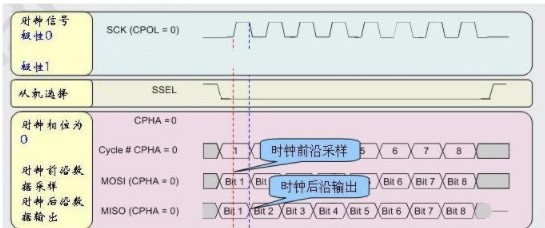
图2
我们来关注SCK的第一个时钟周期,在时钟的前沿采样数据(上升沿,第一个时钟沿),
在时钟的后沿输出数据(下降沿,第二个时钟沿)。首先来看主器件,主器件的输出口(MOSI)输出的数据bit1,
在时钟的前沿被从器件采样,那主器件是在何时刻输出bit1的呢?bit1的输出时刻实际上在SCK信号有效以前,
比 SCK的上升沿还要早半个时钟周期。bit1的输出时刻与SSEL信号没有关系。再来看从器件,
主器件的输入口MISO同样是在时钟的前沿采样从器件输出的bit1的,那从器件又是在何时刻输出bit1的呢。
从器件是在SSEL信号有效后,立即输出bit1,尽管此时SCK信号还没有起效。关于上面的主器件
和从器件输出bit1位的时刻,可以从图3、4中得到验证。
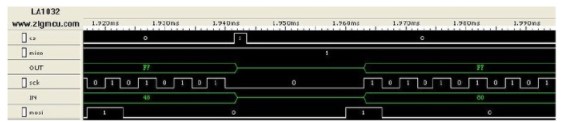
图3
注意图3中,CS信号有效后(低电平有效,注意CS下降沿后发生的情况),故意用延时程序延时了一段时间,之后再向数据寄存器写入了要发送的数据,来观察主器件输出bit1的情况(MOSI)。
可以看出,bit1(值为1)是在SCK信号有效之前的半个时钟周期的时刻开始输出的(与CS信号无关),到了SCK的第一个时钟周期的上升沿正好被从器件采样。

图4
图4中,注意看CS和MISO信号。我们可以看出,CS信号有效后,从器件立刻输出了bit1(值为1)。
通常我们进行的spi操作都是16位的。图5记录了第一个字节和第二个字节间的相互衔接的过程。
第一个字节的最后一位在SCK的上升沿被采样,随后的SCK下降沿,从器件就输出了第二个字节的第一位。

SPI总线协议介绍(接口定义,传输时序)
2、技术性能
SPI接口是Motorola 首先提出的全双工三线同步串行外围接口,采用主从模式(Master Slave)架构;支持多slave模式应用,一般仅支持单Master。
时钟由Master控制,在时钟移位脉冲下,数据按位传输,高位在前,低位在后(MSB first);SPI接口有2根单向数据线,为全双工通信,目前应用中的数据速率可达几Mbps的水平。
3、接口定义与硬件连接
SPI接口共有4根信号线,分别是:CS设备选择线、SCK时钟线、SDO串行输出数据线、SDI串行输入数据线。
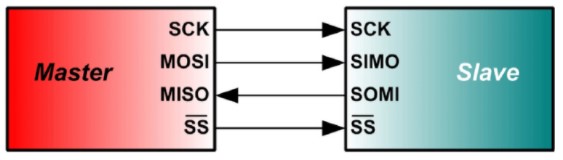
(1)MOSI:主器件数据输出,从器件数据输入
(2)MISO:主器件数据输入,从器件数据输出
(3)SCLK :时钟信号,由主器件产生
(4)/SS:从器件使能信号,由主器件控制

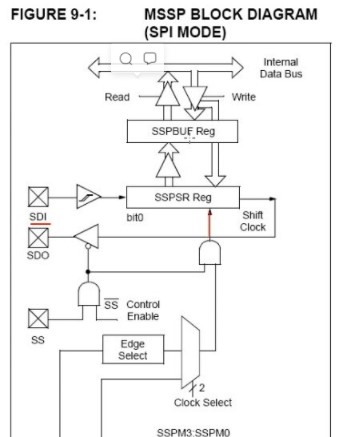
4、内部结构
5、传输时序
SPI接口在内部硬件实际上是两个简单的移位寄存器,传输的数据为8位,在主器件产生的从器件使能信号和移位脉冲下,按位传输,高位在前,低位在后。如下图所示,在SCLK的下降沿上数据改变,上升沿一位数据被存入移位寄存器。

SPI接口没有指定的流控制,没有应答机制确认是否接收到数据。
二、I2C总线协议
1、I2C总线协议
2条双向串行线,一条数据线SDA,一条时钟线SCL。
SDA传输数据是大端传输,每次传输8bit,即一字节。
支持多主控(multimastering),任何时间点只能有一个主控。
总线上每个设备都有自己的一个addr,共7个bit,广播地址全0.
系统中可能有多个同种芯片,为此addr分为固定部分和可编程部份,细节视芯片而定,看datasheet。
1.1 I2C位传输
数据传输:SCL为高电平时,SDA线若保持稳定,那么SDA上是在传输数据bit;
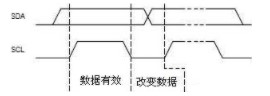
若SDA发生跳变,则用来表示一个会话的开始或结束(后面讲)
数据改变:SCL为低电平时,SDA线才能改变传输的bit
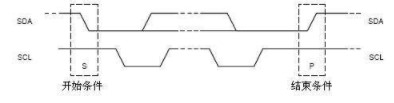
1.2 I2C开始和结束信号
开始信号:SCL为高电平时,SDA由高电平向低电平跳变,开始传送数据。
结束信号:SCL为低电平时,SDA由低电平向高电平跳变,结束传送数据。
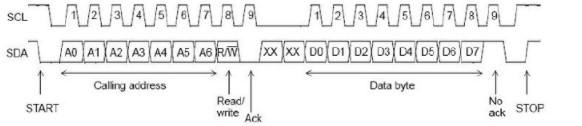
1.3 I2C应答信号
Master每发送完8bit数据后等待Slave的ACK。
即在第9个clock,若从IC发ACK,SDA会被拉低。
若没有ACK,SDA会被置高,这会引起Master发生RESTART或STOP流程,如下所示:
1.4 I2C写流程
写寄存器的标准流程为:
1. Master发起START
2. Master发送I2C addr(7bit)和w操作0(1bit),等待ACK
3. Slave发送ACK
4. Master发送reg addr(8bit),等待ACK
5. Slave发送ACK
6. Master发送data(8bit),即要写入寄存器中的数据,等待ACK
7. Slave发送ACK
8. 第6步和第7步可以重复多次,即顺序写多个寄存器
9. Master发起STOP
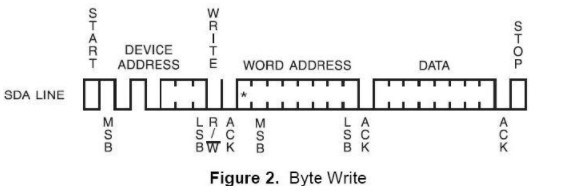
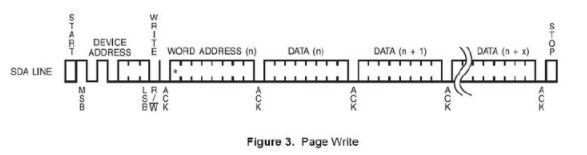
写一个寄存器 写多个寄存器
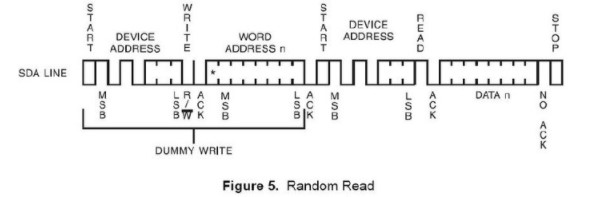
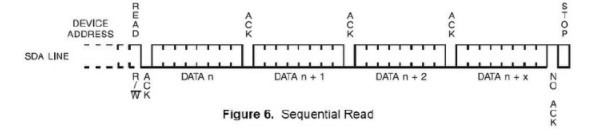
1.5 I2C读流程
读寄存器的标准流程为:
1. Master发送I2C addr(7bit)和w操作1(1bit),等待ACK
2. Slave发送ACK
3. Master发送reg addr(8bit),等待ACK
4. Slave发送ACK
5. Master发起START
6. Master发送I2C addr(7bit)和r操作1(1bit),等待ACK
7. Slave发送ACK
8. Slave发送data(8bit),即寄存器里的值
9. Master发送ACK
10. 第8步和第9步可以重复多次,即顺序读多个寄存器
读一个寄存器 读多个寄存器
2、程序
$include (IicSMasU.inc)
public _IicTxdRxd
public SlvAddr
public SubAddr
BitSegIicSM SEGMENT BIT overlayable
RSEG BitSegIicSM
Retry: dbit 1 ;指明I2C 最后的数据传送失败应该重复操作
BITEA: DBIT 1 ;存中断状态
DataSegIicSM SEGMENT DATA overlayable
RSEG DataSegIicSM
SlvAddr: ds 1 ;被控器地址
SubAddr: ds 1 ;单元地址
TxdByte equ r7 ;要发送数据的字节数(第一传递参数)
RxdByte equ r5 ;要接收数据的字节数(第二传递参数)
WaitXTm macro X ;延时X 个机器周期
if X=0
exitm
endif
if X=1
nop
endif
if X=2
nop
nop
endif
if X=3
nop
nop
nop
endif
if X>255
error "the number of X is too much"
else
mov r6,#X/2
DJNZ r6,$
endif
endm
CodeSegIicSM SEGMENT CODE
RSEG CodeSegIicSM
_IicTxdRxd:
SETB Retry ;设置错误标志位
SendStart:
SETB SDA
SETB SCL
WaitXTm IicDelay
CLR SDA ;产生起始信号
WaitXTm IicDelay
CLR SCL ;结束起动条件
SendSlaAdr:
MOV A,SlvAddr
CJNE TxdByte,#0,SendSlaAdr1
SETB ACC.0 ;TxdByte=0 时进行读操作
SendSlaAdr1:
SETB C ;检测应答位时释放SDA 线
CALL XmByte
JC IicErr ;无应答出错
JB ACC.0,ReceiveData ;SlaAdr.0=1 时进行读操作
;写操作
MOV A,SubAddr
SendData:
SETB C ;检测应答位时释放SDA 线
CALL XmByte
JC IicErr ;无应答出错
MOV A,@R1
INC R1
DJNZ TxdByte,SendData
DEC R1
MOV A,RxdByte
JNZ SendStart ;RxdByte>0 时进行读操作
JMP SendStop
RcvByte:
MOV A,#0FFH ;释放SDA 线允许输入
XmByte:
MOV R4,#9 ;设置数据格式为8 位+1 位(非)应答位
RXBit:
RLC A ;左移数据
MOV SDA,C ;output data
SETB SCL
MOV C,SDA ;input data
WaitXTm IicDelay
CLR SCL
WaitXTm IicDelay
DJNZ R4,RXBit ;重复操作直到处理完所有数据位
RET
ReceiveData:
MOV A,RxdByte
CJNE A,#2,ReceiveData1 ;RxdByte=1(最后一个字节)时,发送非应答位(C=1)
;否则发送应答位(C=0)
ReceiveData1:
CALL RcvByte
MOV @R1,A
INC R1
DJNZ RxdByte,ReceiveData
SendStop:
CLR Retry ;清除错误标志位
IicErr: ;出错返回
CLR SDA
SETB SCL
WaitXTm IicDelay
SETB SDA
MOV C,Retry ;RETURN ERROR FLAG(C=Retry)
RET
END
C语言声明:
extern bit IicTxdRxd(uchar TxdByte,uchar RxdByte, uchar *IicDataBuf);
//函数定义(程序入口地址)
extern data uchar SlvAddr; //被控器从地址
extern data uchar SubAddr; //单元地址子地址
直接调用即可。
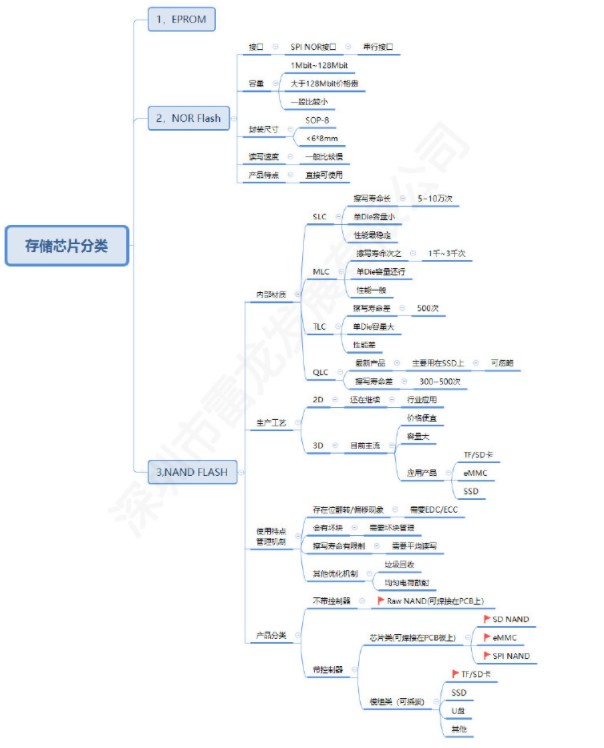
三、存储器的分类
存储产品大概分为E2PROM,NOR,NAND 3类,框架如下:
-
了解I2C协议2021-08-11 1298
-
I2c协议和时序的相关资料推荐2022-02-10 1093
-
I2C总线协议及其应用(图)2006-06-01 7341
-
什么是i2c总线2007-11-05 4373
-
I2C总线协议及其应用2009-02-08 1867
-
SPI、I2C、UART串行总线协议2015-11-30 1194
-
SPI总线及I2C总线工作原理2015-12-08 1490
-
i2c总线协议(中文版pdf)2016-02-26 2188
-
SPI、I2C、UART三种串行总线协议的区别2017-07-17 2170
-
I2C总线物理拓扑结构_I2C总线协议解析2020-09-24 7609
-
I2C总线协议英文资料2021-11-24 1246
-
简述I2C总线协议2023-02-13 2693
-
I2C串行总线协议是什么?I2C总线有哪些优点?2023-09-12 3511
-
I2C总线协议的工作原理和寻址格式2024-05-27 5709
-
I2C总线与SPI总线的比较2025-01-17 2862
全部0条评论

快来发表一下你的评论吧 !
