

用于机器人系统的BLDC需要高性能电机控制
工业控制
描述
电动机是将电能转化为机械能的装置,可用于移动铰接系统。电动机必须能够在低速时产生相当大的扭矩,并且在整个负载范围内都非常高效。它还需要一个简单的控制和驱动机制。尽管无刷直流电机 (BLDC) 需要更复杂的控制,但由于其更好的性能,它们正在机器人应用中找到家。
由于生产成本较低,BLDC 电机越来越受欢迎。尤其是消费级无人机和电动自行车的到来,导致了 BLDC 电机的广泛采用,这些电机以前仅用于高端工业应用。
在过去的二十年里,开发这些 BLDC 电机应用的工程师发生了变化,电机控制也发生了变化。今天的工程师更喜欢专注于使他们的设备设计独特的原因,而不是构建复杂的推进系统。工程师们专注于更时尚的设计,具有最小的外形尺寸、直观的用户界面、实时功能、功能安全和云中的数据共享。
控制问题
机器人系统的一个重要部分是电机控制器。可以使用几种控制策略来操作机器人操纵器或机械臂。所使用的技术及其实施方式会对机械手的性能产生相当大的影响,从而影响可行应用的范围。另一方面,机械手和驱动系统的机械设计会影响可以使用的控制方案的类型。
虽然机器人的工作通常是在操作空间中描述的,但控制动作是根据机器人各个部分的运动在关节空间中实现的。因此,研究两种类型的控制方案是合理的:一种用于联合空间,另一种用于操作空间。控制器结构在这两种方案中都是一个闭环控制系统,以利用反馈在模型上的潜在未知影响的弹性和最小化干扰影响(如噪声)方面的好处。
关节空间控制问题需要解决机械手的逆运动学问题,以将运动要求从操作空间转换为关节空间。然后创建控制方案,以便机械结构的运动可以遵循预期的运动。相比之下,操作空间中的控制需要更高水平的计算复杂性,其中运动学反演被结合到闭环系统中。
需要使用的操作系统以及基于电机和应用需求的各种方法和电路来控制电机的速度和方向。电机控制器的目标是能够手动或自动操作电机(启停、反转、速度、扭转和电压过载保护)。
传统电机具有 BLDC 电机所没有的许多优点。BLDC 和交流驱动的永磁同步电机 (PMSM) 可以在紧凑的外形尺寸中提供所需的精度和高效率。此外,有刷直流电机和交流感应电机易于连接和操作,不像 BLDC 和 PMSM,后者更复杂。
例如,BLDC 使用诸如无传感器矢量控制(也称为磁场定向控制或 FOC)等技术,这些技术提供了良好的效率和消除传感器硬件的优势,从而降低了成本并提高了可靠性。设计人员面临的问题是无传感器矢量控制实现起来很复杂,因此使用它会延长开发时间、增加成本并可能超过上市时间的预测。
为了解决这个难题,设计人员可以求助于开发平台,例如德州仪器公司的DRV8301-69M-KIT引擎套件,其中包括一个集成了降压稳压器和分流放大器的 DRV8301 三相栅极驱动器以及一个 InstaSPIN-FOC和支持 InstaSPIN-MOTION 的 Piccolo TMS320F28069M 微控制器 (MCU) 板。
尽管设计复杂,但 BLDC 的主要优势来自于其结构特性。它们的效率通常比有刷解决方案高 15% 到 20%,由于采用无刷设计,因此需要较少的维护,并且在所有额定速度下都能提供平坦的扭矩曲线。在许多应用中,由于最近半导体技术的进步、永磁体的改进以及对更高效率的需求增加,有刷电机已被 BLDC 取代。
直流驱动器
BLDC 使用电子换向,可实现更好的电流切换。它导致更大的扭矩、在宽范围内的精确速度控制以及改进的电机性能。在大多数 BLDC 电机控制器中都可以找到半桥或半 H 桥电路。这种电路设计与 H 桥不同,只有两个开关:一个高侧晶体管和一个低侧晶体管。
提供单相、两相和三相 BLDC 电机。三相类型是最流行的。电机定子的绕组数量与相数相关,但转子磁极可能是任意数量的对,具体取决于应用。
BLDC 控制的一个基本组件是驱动器。它是一种电压输出功率放大器,用于驱动半桥电路的大电流高侧和低侧 IGBT 栅极。
一个例子是 Power Integrations 400-W BRD1167 和 BRD1267BridgeSwitchIC,它们提供 1.33 A 的连续 RMS 相电流和 11.5 A 的 FREDFET 直流输出电流。它们是自供电的,采用 InSOP-24C 表面贴装封装,就像 BridgeSwitch 家族的其他成员一样。这些器件支持所有主要的 MCU 和电机控制方法,可以运行单相或多相高压同步或异步电机。所有 BridgeSwitch IC 都包含过流、过压/欠压和过热保护,简化了 IEC 60335 和 IEC 60730 认证。
另一个例子是 Monolithic Power Systems Inc. 的MP6612D可逆电机驱动器,它使用 H 桥。它可以操作直流电机、步进电机绕组和其他负载。四个 N 沟道功率 MOSFET 和一个内部电荷泵在 H 桥中产生栅极驱动器电压。DIR 和 ENBL 引脚用于控制输出。
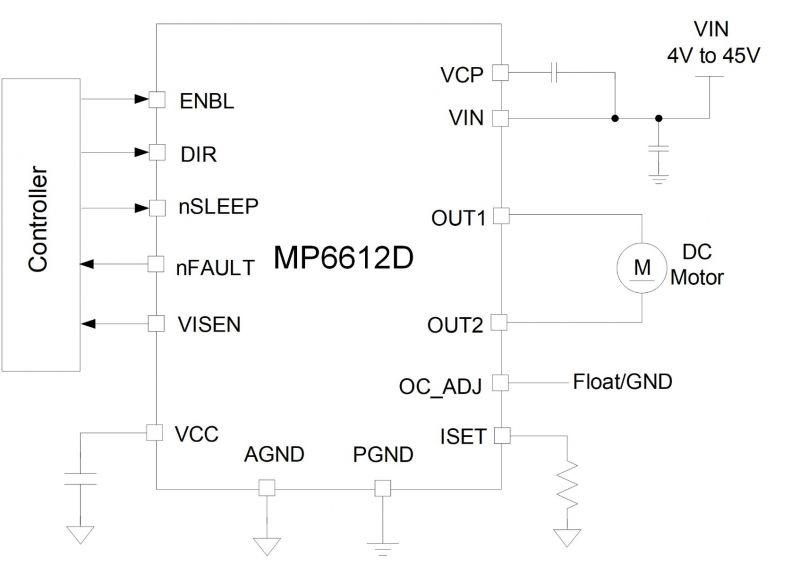
MP6612D 框图(来源:Monolithic Power Systems Inc.)
宽带隙半导体
新兴电子应用需要能够从越来越紧凑的平台中提取更高性能的电机设计。依靠经典硅 MOSFET 和 IGBT 的电机驱动器电路正在努力满足新标准。随着硅技术接近功率密度、击穿电压和开关频率的理论极限,设计人员越来越难以控制功率损耗。这些限制的主要后果是在高工作温度和开关速率下效率降低和额外的性能问题。
诸如碳化硅 (SiC) 和氮化镓 (GaN) 器件之类的宽带隙 (WBG) 半导体用于电机控制,因为它们提供了更快的开关,这对于在高基频下运行并需要良好滤波纹波的电机来说可能是必需的。然而,WBG 器件实现的高开关速度在提供更高转换效率的同时,也会产生非常快的电压变化,从而导致高电压变化率 (dV/dt),从而对电机绕组的绝缘造成压力。因此,电力电子应用有两个主要目标:管理热问题和减小系统尺寸。
德州仪器 (Texas Instruments) 等制造商开发了 GaN 集成功率器件,有助于从 WBG 器件中获得最佳性能。例如,LMG5200提供了一个带有增强型 GaN FET 的 80V GaN 半桥功率级。该器件由两个 GaN FET 组成,由一个采用半桥布置的高频 GaN FET 驱动器供电。
TI 提供 TIDA-00909,这是一种用于高频电机驱动器的参考设计,该参考设计采用三相逆变器和三个 LMG5200,以简化该器件的设计。对于简单的性能评估,TIDA-00909 带有一个合适的接口,用于连接到 C2000 MCU LaunchPad 开发套件。
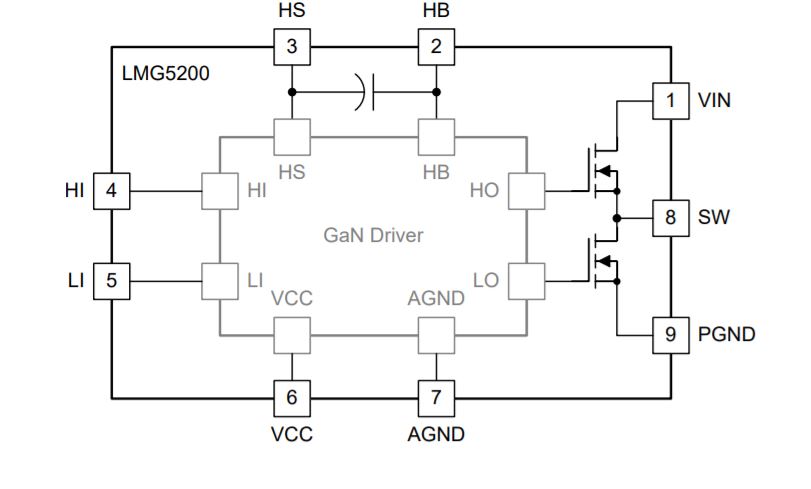
LMG5200 框图(来源:德州仪器公司)
另一个例子是 EPC 的EPC9146电源板,它采用 EPC 专有的 GaN IC 技术将 EPC2152 单片 ePower Stage 与集成栅极驱动器结合在一起,并提供 80-V 的最大器件电压和 15-A 的最大输出电流。凭借高达 3 MHz 的 PWM 频率,它可以满载运行。EPC9146 提供适用于电源驱动应用的功能,例如具有集成栅极驱动器的单片功率级、用于管理电源的稳压辅助电源轨、电压和温度感应、精确电流感应和保护功能。
EPC9146可与EPC9147系列配套板配对,让用户直接通过主流MCU板控制电源板,利用现有资源进行快速开发。
机器人的复杂性需要正确的驱动程序来正确执行与工业应用相关的功能。WBG 半导体用于电机控制,因为它们允许更快的切换,这对于在高基频下运行的电机是必需的。工程师们更愿意专注于让他们的小工具设计与众不同的地方,而不是创建一个复杂的推进系统。
审核编辑:汤梓红
-
浅谈儿童陪护机器人2023-05-11 1183
-
基于 MSPM0 MCU 实现使用无传感器 FOC 算法的 BLDC/ PMSM 控制2023-04-12 1665
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 2614
-
什么是机器人控制系统2021-10-11 3667
-
四足机器人的机构设计2021-09-15 2144
-
机器人系统与控制需求简介2021-09-08 2359
-
【设计技巧】不会选电机,还做什么机器人2019-08-10 2329
-
如何设计智能灭火机器人控制器?2019-07-31 3979
-
选择机器人电机的几点思考2019-03-12 4251
-
拆开工业机器人,让你见识机器人驱动系统中的电机种类2018-10-30 6934
-
如何选择机器人电机2018-10-19 2730
-
RoboMaster发布M2006动力系统!体积小、性能强,助力高性能机器人开发2018-05-11 15204
-
辰汉-如何实现服务机器人的运算与控制2017-06-09 3003
-
工业机器人所用的电机驱动系统2015-01-23 7714
全部0条评论

快来发表一下你的评论吧 !
