

揭开工业系统串行通信协议的神秘面纱
今日头条
描述
系统或子系统之间的异步串行通信解决方案包括许多可能的接口实现——例如,RS-232、RS-485、RS-422、控制器局域网 (CAN)、以太网、本地互连网络、高速公路可寻址远程传感器、IO-链接和无线协议,如 Zigbee 或 LoRa。在许多情况下,互操作性问题是选择协议时的最大决定因素,特别是如果您设计的子系统必须与现有网络和安装进行通信,或者与上一代设计向后兼容。
但是对于没有这些限制的较新的应用程序,选择正确的接口实现需要评估一系列因素之间的权衡,例如通信带宽、距离、总线拓扑和节点数、总线访问方法、解决方案成本以及与其他设备互操作的能力。系统。
本文旨在通过对一些常见标准的高级概述来帮助您做出更明智的接口选择:RS-232、RS-422 和 RS-485 以及 CAN。这些标准因其稳健性、易于实施和满足常见应用需求的能力而继续在工业通信中得到广泛采用,并且尽管引入了更新的通信技术,但它们的使用预计将持续一段时间。
RS-232
RS-232 最初于 1960 年由电子工业协会 (EIA) 标准化,是仍在积极使用的最古老的数字通信技术之一。该标准的当前版本是电信行业协会 (TIA)-232-F,描述了一种单端信令方案,该方案本质上是点对点的(如图1所示),旨在在数据终端设备 (DTE) 之间运行),例如 PC 和数据电路终端设备 (DCE),例如调制解调器。
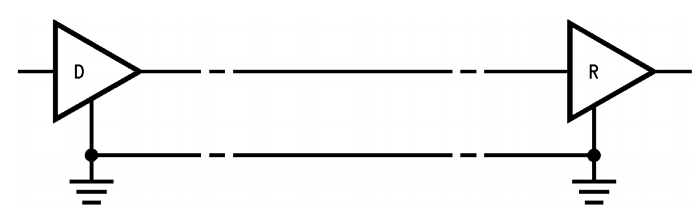
图 1:点对点连接(图片:德州仪器)
TIA-232-F 定义了几种不同的物理信号:
从 DCE 到 DTE 的数据载波检测 (DCD)。
从 DCE 到 DTE 的数据集就绪 (DSR)。
从 DCE 接收数据 (RD) 到 DTE。
从 DTE 到 DCE 的请求发送 (RTS)。
将数据 (TD) 从 DTE 传输到 DCE。
从 DCE 到 DTE 的清除发送 (CTS)。
从 DTE 到 DCE 的数据终端就绪 (DTR)。
从 DCE 到 DTE 的振铃指示器 (RI)。
TD 和 RD(有时称为 TxD 和 RxD)用于传输串行数据,而其他信号有助于管理系统之间的数据流。存在这种流控制是为了确保系统仅在能够处理串行数据时才接收串行数据,以便在设备之间的运行速度不匹配时不会发生缓冲区溢出。然而,在许多现代实现中,物理流量控制信号的数量通常会减少或完全省略,以支持基于软件的流量控制。
逻辑低或逻辑高状态在线路上分别表示为正电压或负电压,其在发射器输出端的幅度相对于地的变化范围为 ±5 V 至 ±15 V(假设标准接收器负载条件)。在许多现代实现中,具有集成电荷泵电路的收发器基于 5 V、3.3 V 或 1.8 V 等较低电压逻辑电源产生这些较高电压的双极轨。接收器电路可以可靠地检测高和低状态,只要它们超过±3 V 幅度。示例发送和接收波形如图2 所示。
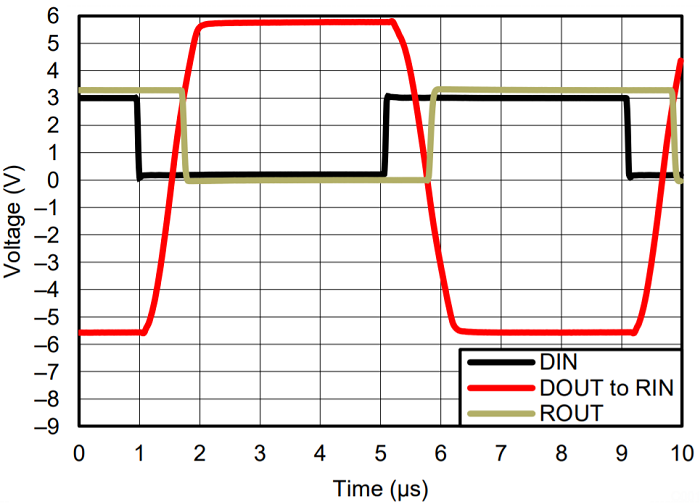
图 2:RS-232 发送和接收波形(图片:德州仪器)
这些相对较高的电压有助于通过合理的电缆连接扩展接口,并提供一定程度的抗噪性。然而,较大的信号摆幅确实会导致通信速度相对较慢(低波特率),因为出于电磁干扰 (EMI) 的原因,必须限制发送器输出的转换或压摆率。由于这一限制,TIA-232 标准规定最大波特率仅为 20 kbits/s。然而,许多现代实现在这方面偏离了标准,并且可以使用能够实现更高速度(1 Mbits/s)的收发器。
与采用平衡差分信号的较新接口标准相比,可实现的电缆长度是有限的。互连电容限制为 2500 pF,这通常意味着电缆长度约为 15 到 20 米 (m)。
对于许多应用而言,该标准的另一个缺点是它无法支持多点总线。只允许点对点连接,因此互连节点的数量限制为两个。
尽管存在这些缺点,但 RS-232 仍然很受欢迎,因为它易于实施、在终端设备中无处不在,并且在现场安装了数十年。
RS-422 和 RS-485
RS-422 (TIA/EIA-422) 和 RS-485 (TIA/EIA-485) 通过使用平衡差分信号而不是单端(接地参考)信号来支持更长距离的更高速通信。换句话说,逻辑高或逻辑低状态由信号对的互补同相和反相半部分之间的正电压差或负电压差表示。这些半部分通常被称为发射器的 Y 和 Z,以及接收器的 A 和 B。(在两个方向上使用单对数据的半双工实现通常仅使用 A 和 B 命名。)接收波形的示例发送如图 3 所示。
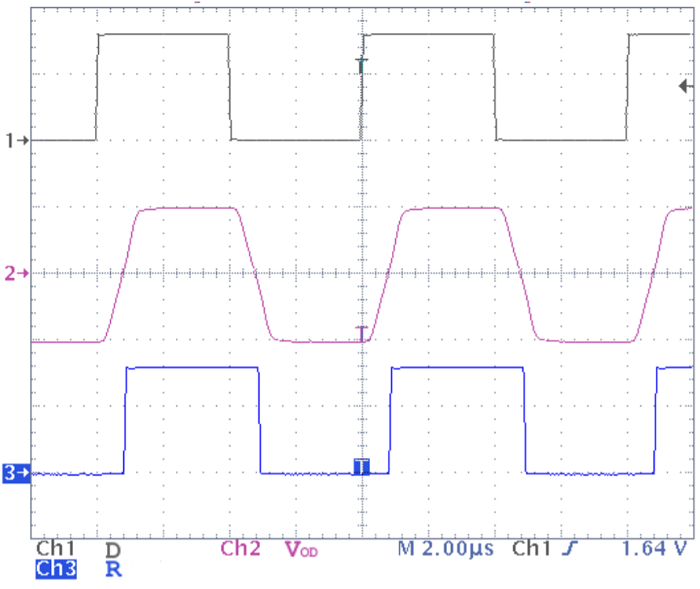
图 3:RS-485 示例波形;通道 2 (VOD) 显示 A 相对于 B 的电压(图片:德州仪器)
使用差分信号有几个优点:
使用两条互补信号线有效地使传输的信号幅度加倍,从而使用由标准低压轨(例如 5 V 或 3.3 V)供电的收发器实现更远距离的通信。
由于接收器感应到两条信号线之间的差异,因此通信更不受局部接地电位的微小差异(这会在接地参考信号上产生电压偏移)和可能耦合到信号电缆上的电磁噪声的影响(因为这种噪声倾向于同等地影响差分对的两半)。因此,该接口更适合在更长的距离以及跨电源域和电噪声环境中运行。
电磁辐射较低,因为来自一条信号线的噪声贡献被来自互补线的相等和相反的贡献有效地抵消。这与较低的电压摆幅相结合,通常可以在不超过应用的 EMI 要求的情况下使用更高的信号速率。
假设最大总线负载(包括终端电路),RS-485 发送器将输出至少 1.5 V 的差分电压幅度,接收器将检测至少 200 mV 的信号。(对于 RS-422,这些值分别为 2 V 和 200 mV。)对于以低数据速率运行的应用,传输距离可能超过 1 公里 (km),主要受所用电缆的串联电阻限制. 对于较短距离的应用,可以实现高达 50 Mbits/s 的信号速率,尽管受到收发器切换时间和电缆寄生引起的高频损耗所引入的定时抖动的限制。
除了增加的距离和信号速率,RS-422 和 RS-485 还可以支持多点网络应用。它们的使用通过将一系列点对点连接(主机和外围设备之间)替换为可以连接多个系统的单个共享总线来简化工业安装中的布线。
RS-422 指定支持单工多点布置,其中一个发射单元可以广播到多达 10 个接收单元。RS-485 通过允许大量节点之间的双向通信(半双工或全双工)进一步扩展了这一概念。在这种情况下,节点数受到每个接收器对共享总线贡献的负载的限制,最多允许 32 个单元负载。单位负载定义为在施加电压范围内接收器泄漏电流的参考单位。
对于现代实现,通过使用泄漏较低的收发器设备可以实现非常高的节点数;例如,额定为八分之一单位负载的收发器可以支持 256 个节点 (32 × 8) 的网络。多点网络的一个例子如图4所示。
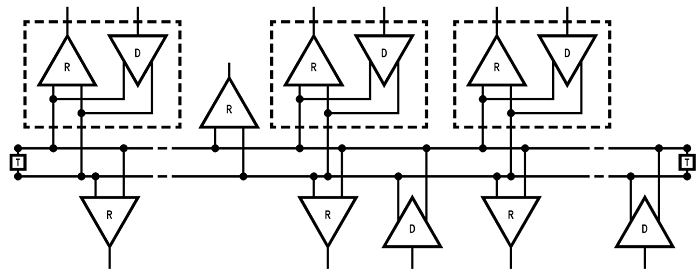
图 4:用于 RS-485 通信的多点网络(图片:德州仪器)
RS-485 支持广泛的距离、数据速率和节点数以及出色的抗噪能力,这使得 RS-485 成为许多不同应用中的理想选择。它在工业环境(用于电机控制的编码器接口或工厂自动化应用中的现场总线)、电网基础设施(作为智能电能计量的接口)和楼宇自动化应用(恒温器或智能照明控制)中很受欢迎。
能够
汽车行业最初开发 CAN 是为了方便将消息从微控制器广播到共享网络,这样就可以使用简单的总线型布线,而不是单个点对点连接的复杂(和沉重)线束。这种接口的好处不仅仅在于汽车应用。如今,CAN 广泛用于各种工业通信应用,例如楼宇自动化(供暖、通风和空调;电梯)、工业运输和工厂自动化。它是根据国际标准化组织 11898 进行标准化的,该组织不仅定义了物理层,还定义了数据链路层协议。(这与迄今为止讨论的标准相反,
与 RS-485 一样,CAN 使用平衡差分信号来实现更长的传输距离、更低的 EMI 和更高的抗噪能力。然而,CAN 驱动器不是同时驱动高电平和低电平状态,而是设计为具有这两种输出状态,如图5所示:
显性,其中通过将一条线(称为 CANH)拉高并将互补线(称为 CANL)拉低,将差分输出电压驱动到总线。产生的驱动器差分输出电压必须至少为 1.5 V,并且接收器被设计为将任何大于 900 mV 的差分电压视为主要电压。该状态用于表示逻辑低位值。
隐性,其中总线输出为高阻抗,CANH 和 CANL 都被弱偏置到中等电压。在这种状态下,驱动器差分输出电压将接近 0 V,接收器能够将任何低于 500 mV 的差分电压视为隐性电压。此状态用于表示逻辑高位值。
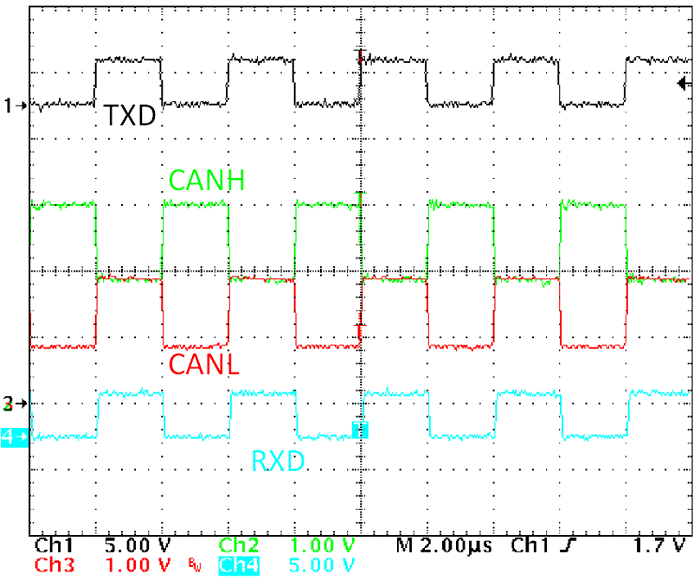
图 5:显示 CANH 和 CANL 信号的 CAN 波形(图片:德州仪器)
每个状态下有效输出阻抗的差异意味着如果一个或多个节点正在发送一个显性状态,则认为总线状态是显性的;只有当每个节点都处于隐性状态时,总线状态才能被认为是隐性的。(这种类型的线与信号类似于许多其他协议中常见的开漏信号,例如 I 2 C。)
物理层的这种行为有几个缺点:较低的有效信号摆幅和使信号的不对称特性更容易受到位时序失真的影响,特别是在网络上存在较高电容负载的情况下。然而,在不损坏数据的情况下,使协议能够处理消息冲突(来自多个节点的同时传输)是关键。
事实上,该协议能够在同时启动的传输之间自动进行仲裁,并允许总线访问更高优先级的消息(如消息头中的标识符字段所示)。因此,CAN 能够充当多发起者接口,其中节点可以在事件触发的基础上进行通信,而不是由单个主机进行排序。这使得 CAN 非常适合可能没有集中式主机的应用程序,或者受益于立即发生数据传输的应用程序。
仲裁协议确实限制了网络上节点之间允许的时间延迟;然而,总的往返传播延迟必须适当地小于一位所需的时间,以保持网络上的同步。与 RS-485 相比,这使得 CAN 在电缆范围和比特率方面更具限制性。
例如,一个常见的建议是将仲裁期间的比特率限制为 1 Mbits/s,并将电缆长度限制为小于 40 m。较低的比特率可以支持更长的距离;例如,工厂自动化应用经常使用基于 CAN 的 DeviceNet 协议,该协议在某些情况下允许电缆距离长达 500 m。CAN 协议有一个灵活的数据速率变体,通过在给定消息窗口仲裁后启用更高速的通信(高达 5 Mbits/s)来扩展数据吞吐量。
CAN 协议的另一个主要优点是它能够检测和限制数据错误,例如连接问题或节点故障。每个节点都能够检测到发送和接收错误,如果错误源持续存在,将自动停止显性状态传输。这可以防止单节点问题中断全球通信。
由于物理层和数据协议的稳健性,CAN 是需要在不受公共主机控制的情况下独立运行的任意数量源之间进行可靠数据传输的应用的首选解决方案。
结论
当今使用了许多工业通信协议,每种协议都有其优点和缺点。表 1总结了本文讨论的标准。
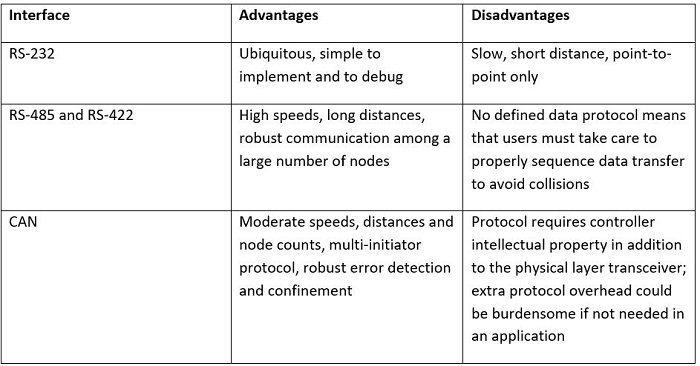
表 1:比较 RS-232、RS-485 和 RS-422 以及 CAN 协议(图片:德州仪器)
通过了解这些协议如何与应用程序的要求相交,您可以选择最适合您需求的协议。
审核编辑:汤梓红
-
Modbus串行通信协议概述2022-09-02 1940
-
[分享]揭开zzz 手机神秘面纱2009-05-31 3794
-
揭开深记忆示波器的神秘面纱2019-09-23 1268
-
简述一下Modbus串行通信协议2022-02-16 1169
-
高效的串行通信协议的制定及实现2010-12-03 675
-
苹果iPhone手机神秘面纱被揭开2010-04-17 697
-
揭开vivo APEX全面屏的神秘面纱2018-03-21 2539
-
Duskers - 揭开科幻生存游戏中的神秘面纱2018-11-08 4166
-
MT-001: 揭开公式(SNR = 6.02N + 1.76dB)的神秘面纱2021-03-20 1617
-
AN40-揭开开关电容器过滤的神秘面纱2021-04-27 825
-
如何选择合适的工业以太网标准:串行实时通信协议(Sercos)III2022-11-04 855
-
揭开数字健康应用的AI和机器学习的神秘面纱2022-12-01 1424
-
新能源汽车的“隐形护卫”,揭开WAYON维安Auto TVS的神秘面纱2023-01-06 1953
-
揭开快充芯片的神秘面纱2024-04-15 1693
-
用智能DAC揭开医疗报警设计的神秘面纱2024-09-14 334
全部0条评论

快来发表一下你的评论吧 !
