

具有集成MEMS振荡器的RTC提高了计时精度
今日头条
描述
时间是我们不愿观看、难以管理但又无法忘记的宝贵、有限的商品。在日常生活中帮助我们的无数电子设备的实用性很大程度上取决于它们跟踪“实时”时间的能力,即我们用来标记日常生活的秒、分钟、小时、天和年生活。
与静态电子设备相比,电池供电的便携式、可穿戴和物联网设备面临着更加完全不同(甚至可能是极端)的操作和环境条件,静态电子设备在可预测的环境条件下运行,并提供永久电源。无论是发送最新的天气报告还是计算锻炼时消耗的平均卡路里,物联网和移动设备都依赖于准确可靠地跟踪时间的能力,即使在寒冷和潮湿的环境中可能会受到剧烈的身体运动,或者炎热潮湿的地方。
在本文中,我们展示了这些条件如何对基于晶体振荡器的实时时钟 (RTC) 的性能规格产生负面影响,并展示了一种 RTC IC,它在需要耐用性性能的应用中结合了更高的计时精度和更高的鲁棒性-有。
实时时钟操作
大多数 RTC IC 使用来自 32.768 kHz 晶体振荡器的 1 Hz 时钟信号,通过计数秒来保持时间和日期信息,这是大多数电子应用使用的标准计时参考。时间和日期信息存储在一组寄存器中,可通过通信接口(例如 I 2 C)访问。晶体可以在 IC 外部或集成在同一封装内。
计时精度、稳健性/坚固性、功率和尺寸是选择 RTC 时要考虑的关键规格。正如我们将要讨论的那样,每种方法的相对重要性都与选择独立 RTC IC 还是使用已集成到系统微控制器中的 RTC IC 的选择有关。
计时精度
RTC 的计时只能与其使用的计时参考一样准确。不幸的是,典型的 32.768 kHz 音叉晶体在很宽的温度范围内不是很准确。由于其抛物线特性,该精度在室温 (+25°C) 下通常为 ±20 ppm。这相当于每天增加或减少 1.7 秒的时间,或每年增加或减少 10.34 分钟。
如图所示,精度在更高和更低温度下显着降低。这些温度下的典型精度远低于 150 ppm,这相当于每天损失近 13.0 秒的时间,或每年超过 1.3 小时。
此外,晶体被调谐为在特定电容负载下以正确的频率振荡——在设计为向晶体提供 6 pF 负载的 RTC 上使用调谐为 12.5 pF 负载的晶体会导致时钟运行过快。需要仔细的电路板布局和组装,以尽量减少可能减慢时钟的多余电容的影响。对于具有集成电容器的 RTC,时序精度受到 IC 制造商制造公差的限制。
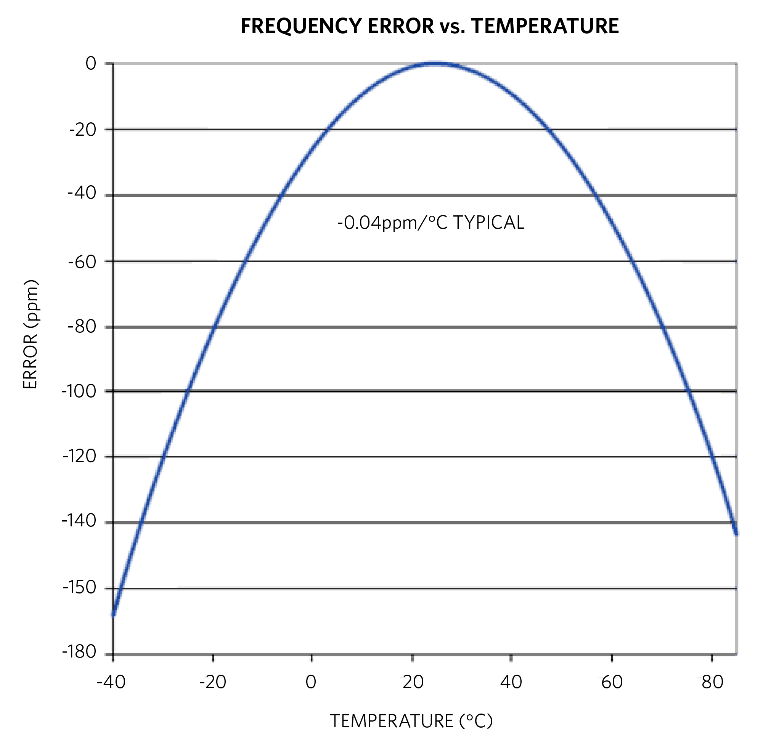
图 :晶体精度与温度的关系(图片:Maxim Integrated)
坚固性——冲击和振动
移动和便携式设备经常受到机械冲击和振动。无论是健身追踪器由于锻炼运动员的运动而经历的振动,还是一件遥测设备从气象气球落回地球所经历的 G 力,每个用例都带来了自己的一系列挑战.
晶体振荡器相对脆弱,使其容易受到更极端的冲击和振动的损坏。即使在更温和的条件下运行,它们也会因为每年大约 ±1 ppm 的老化速度而失去精度。
坚固性——温度
在组装过程中,印刷电路板反复经受高温(回流)。此过程会对 RTC 的准确性产生不利影响。图 显示了典型回流操作(前和后)对基于晶体的 RTC 性能的影响,显示了高达 5 ppm 的偏移。
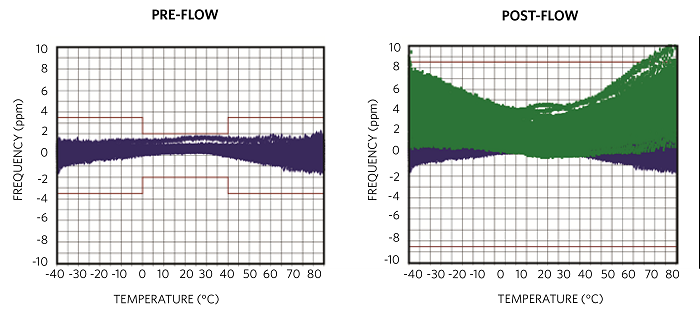
图 :基于晶体的 RTC 回流前和回流后的时序精度(图片:Maxim Integrated)
电流消耗和尺寸
虽然电流消耗和大小不直接相关,但它们是相互关联的。许多应用使用集成在系统微控制器中的基于晶体振荡器的 RTC。虽然这减少了电路板 IC 的数量,但它可能会产生意想不到的后果,即阻止微控制器进入超低功耗“深度睡眠”模式。
对于不连续使用的物联网设备,例如,仅在检测到运动时唤醒以传输图片的远程运动检测器相机(否则保持睡眠模式),这一点很重要。必须保持准确的计时,即使在设备未使用时,典型的微控制器可能会消耗 60 0nA 以保持其 RTC 电路处于唤醒状态,从而导致设备电池更快耗尽。
还应注意,计时精度也由微控制器制造商决定。基于外部 RTC IC 的解决方案提供了设计更准确和更低功耗解决方案的灵活性。
平衡的性能
图 显示了 RTC IC 的功能框图,它在前面讨论的所有功能要求之间取得了最佳平衡。
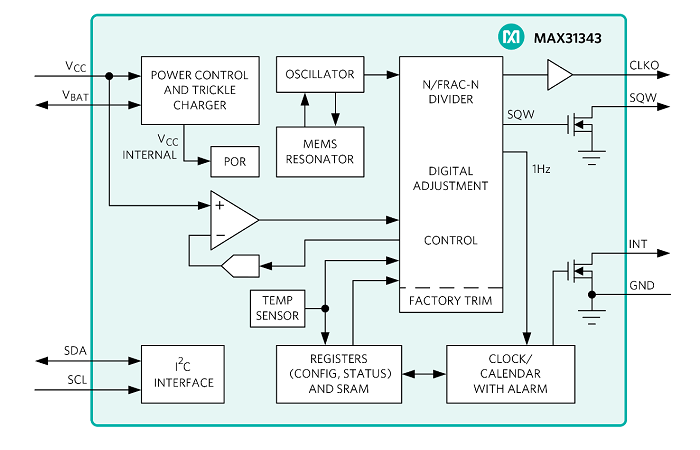
图 :带有集成 MEMS 振荡器的 MAX31343 RTC(图片:Maxim Integrated)
MAX31343 IC采用集成MEMS谐振器和振荡器,与基于晶体振荡器的RTC相比具有多项优势。时间变化仅为 ±5 ppm(或从 -40°C 到 85°C 时为 ±0.432 秒/天),它提供了 4 倍的计时精度提高,而变化可以忽略不计(由于老化或回流焊过程中的老化或回流,<±2 ppm板焊接) 。它也比基于晶体振荡器的 RTC 更坚固,能够承受机械冲击(高达 2900 G;5 次冲击 × 6 轴,JESD22-B104C 条件 H)和振动(可变频率为 20 G;20/ 2000 Hz,JESD22-B103B 条件 1)。
它允许通过双向 I 2 C 总线与微控制器进行串行数据通信。为了获得额外的冗余,该 RTC 使用集成的电压基准和比较器电路来监控 V CC的状态。这使其能够检测主系统是否可能出现电源故障,并在需要时自动切换到备用电源(可充电电池或超级电容器)。
MAX31343 的典型工作电流为 940 nA,可通过额定 48 mAh 的 BR1225 锂备用电池提供超过五年的计时。集成的涓流充电器可在正常运行期间使备用电池充满电。
其他有用的功能包括两个可编程的时间警报、中断输出、无补偿的可编程时钟输出和温度补偿的可编程方波输出。它采用 2.1 × 2.3 mm 8 引脚 WLP 或 4 × 3 mm 8 引脚 TDFN 封装,可在 1.6 V 至 5.5 V 的宽电源电压范围内工作。
概括
电池供电的物联网、便携式和可穿戴电子设备预计将在广泛变化的环境条件下运行,并具有足够的鲁棒性以承受机械振动和冲击。这些条件会对常用的基于晶体振荡器的 RTC 电路的精度和性能产生负面影响,从而影响它们对某些应用的适用性。
使用集成 MEMS 振荡器的 RTC IC 可提供卓越的计时精度,该精度受环境条件或机械冲击和振动的影响可忽略不计。在典型操作中消耗小于 1 µA,它适用于坚固的应用,包括工业传感器、运动相机、手持仪器和可穿戴设备。
审核编辑:汤梓红
-
MEMS振荡器的应用2025-11-21 2480
-
MAX31343集成MEMS振荡器的±5ppm、I2C实时时钟技术手册2025-02-26 1529
-
RTC集成电路的时基振荡器2024-10-24 412
-
石英晶体和MEMS振荡器的性能2024-06-25 1928
-
MEMS差分振荡器与传统差分振荡器的比较2024-01-26 1816
-
MEMS振荡器与传统振荡器的比较2023-12-13 1625
-
使用MEMS振荡器代替晶体谐振器的 8 大理由(三)2021-11-13 4910
-
使用MEMS振荡器代替晶体谐振器的 8 大理由(一)2021-11-11 8231
-
MEMS振荡器对机械应力的抵抗能力2021-04-01 1100
-
MEMS振荡器的特点优势及为应用提供计时方案2020-07-26 1662
-
PCF2127 TCXO RTC计时应用和焊接信息2020-03-19 1997
-
MEMS振荡器对机械应力的抵抗能力的详细中文资料概述2018-06-13 1270
-
AN2340 - MEMS振荡器对机械应力的抵抗能力2018-03-21 1060
-
爱普生可编程石英振荡器都有哪些系列?具有什么使用特点?2017-01-04 4819
全部0条评论

快来发表一下你的评论吧 !
