

解锁精准导航
今日头条
描述
你最后一次从手套箱里拿出地图来弄清楚如何从一个地方到另一个地方是什么时候?您上一次访问 Mapquest.com 打印前往新地点的路线是什么时候?
由于技术和精确导航的进步,我们不再依赖于地图导航的“旧方式”。这些进步来自全球定位系统 (GPS)、惯性测量单元 (IMU) 和全球连接技术的革命性改进,可为您的智能手机提供您的位置和方向,以便导航到您的目的地。
话虽如此,仍然需要使用传感器组合来定位我们所在位置的更高精度的导航系统。今天,我们在智能手机和汽车中看到了这种精确需求,因为我们看到我们的位置在地图上跳跃,同时穿过隧道或高速公路立交桥。解决实现真正精确导航的挑战被认为非常重要,以至于DARPA一直在积极开发改进导航的工作——它被认为是“圣杯”,能够在有限或没有 GPS/GNSS 覆盖的情况下确定精确位置。
什么是精准导航?在当今许多应用的背景下,精确导航是车辆和操作员以高精度、可重复性和可信度持续了解其在 3D 空间中的绝对和相对位置的能力。为了安全高效地运行,精确的位置数据还需要快速、经济高效且不受地理位置限制。
许多行业的重要应用都需要可靠的精确导航、定位和微定位方法。智能农业越来越需要使用自主或半自主设备来提高种植和收获世界粮食供应的超精确度和生产力。在全球大流行期间,物流效率对仓储和运输/交付行业的影响变得显而易见——仓库和货运机器人的有效性取决于它们的定位和导航能力。远程和最后一英里交付的自主能力也需要精确导航。
今天确实存在高精度解决方案,并用于卫星导航、商用飞机和潜艇等应用。然而,这些解决方案的成本很高(数十万美元)并且尺寸很大(一条面包)。这些惯性导航系统 (INS) 成本和尺寸高的原因主要在于所需的高性能 IMU 的成本和尺寸,其中陀螺仪性能最为关键。
IMU 技术逐渐提高了硬件的尺寸和成本,从笨重的万向陀螺仪到光纤陀螺仪,再到今天的微型微机电系统 (MEMS) 传感器。另一个需要考虑的方面是 INS 软件开发和集成的成本,因为现代应用程序的复杂性和复杂性增加,结合人工智能和机器学习来改进决策和安全性。
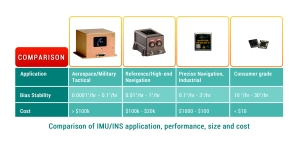
惯性导航系统和传感器的性能、尺寸和成本各不相同。尽管最初是为专门的解决方案而开发的,但现在都可以在汽车应用中找到。(来源:ACEINNA)
将这项技术带入日常生活的关键是在保持性能的同时降低成本和尺寸。这样做可以实现新功能,这些功能对于无人机、农业机器人、自动驾驶汽车和智能手机的进步至关重要。
导致您在地图上的位置跳跃的原因突出了当今 GPS 技术的局限性。大气干扰和过时的卫星轨道路径数据可以在一定程度上得到修正,计算出的最佳位置精度约为1米。与城市地区的多径误差或其他地区的覆盖差相结合,接收器的误差范围增加,位置置信度降低。
这种误差范围转化为道路级别的准确性,即车辆可能在哪条道路上的知识。更高精度的导航旨在获得车道级精度或更好的车道位置知识。
想象一下,一个人在路上开车,无需非常努力,驾驶员就能够观察并绕过障碍物,例如行人、骑自行车的人和坑洼,而不会偏离车道。即使在恶劣的天气条件下,每天都会穿越带有令人困惑的道路标志的复杂十字路口。人类使用多种感知(和深度感知),结合过去积累的经验和实践,来执行看似简单的驾驶任务。
以类似的方式,自主和半自主车辆使用一套感知传感器与导航解决方案相结合,以安全地从一个点移动到另一个点。由于 GPS 和 INS 的现有限制(性能、成本和尺寸之间的权衡),车辆系统必须采用额外的方法来提高定位精度。车道级或厘米级的位置精度在 L2+ 自动化系统中非常重要,可以使车辆在复杂、动态的环境中安全导航,而无需人工干预。
一种流行的定位方法是使用来自激光雷达和摄像头的图像和深度数据,结合高清地图,参考已知的静态地标和物体实时计算车辆位置。高清地图是一个强大的工具,包含大量数据,包括道路和车道级别的细节和语义、动态行为数据、交通数据等等。摄像机图像和/或 3D 点云被分层并交叉引用到车辆的高清地图数据,以做出车辆控制的机动决策。
这种本地化方法虽然有效,但也存在挑战。高清地图是数据密集型的,大规模生成的成本很高,并且必须不断更新。感知传感器容易受到环境干扰,从而影响数据质量。
随着道路上自动测试车队数量的增加,生成了更大的真实世界驾驶场景数据集,并且用于定位的预测建模变得更加稳健。然而,它的代价是昂贵的传感器、计算能力、算法、高运营维护以及数 TB 的数据收集和处理成本。
通过将实时运动学 (RTK) 整合到 INS 解决方案中,有机会提高用于精确导航的定位方法的准确性和完整性。RTK 是一种技术和服务,可纠正 GPS/GNSS 数据中的错误和模糊性,以实现厘米级精度。
RTK 与固定基站网络一起工作,这些基站通过空中向移动的车辆或流动站发送校正数据。每个流动站都将这些数据集成到他们的 INS 定位引擎中以实时计算位置,即使没有任何额外的传感器融合并且收敛时间非常短,也可以实现高达 1 cm + 1 ppm 的精度。
将 RTK 集成到 INS 和传感器融合架构中相对简单,不需要大量使用系统资源。RTK 的使用确实需要连接和 GPS 覆盖以实现最精确的导航,但即使在中断的情况下,系统也可以采用航位推算和使用高性能IMU来持续安全运行。
RTK 的优势在于通过为每个位置基准提供精确的绝对位置以及置信区间来支持视觉定位方法。定位引擎可以使用它来减少歧义并验证时间和上下文估计。
结论精确导航能力是无数现代应用和行业的核心,这些应用和行业致力于改善我们的日常生活——自动驾驶汽车、微型移动、智能农业、建筑和测量。如果机器可以移动,那么准确和确定地测量和控制其运动至关重要。
惯性传感器对于测量运动至关重要,GPS 提供有关 3D 空间中位置的有价值的上下文感知,添加 RTK 可提高可靠性和完整性。视觉传感器可实现深度感知,让您可以规划未来。来自这些不同传感器和技术的数据相结合,使人们对航行规划和决策充满信心,从而提供安全、精确和可预测的结果。
关于作者Reem Malik 负责ACEINNA的战略销售和业务发展,专注于自主应用的精确定位硬件和软件解决方案。她拥有超过 15 年的工程和销售经验,与 Analog Devices 和 Allegro Microsystems 的全球汽车、消费和仪器仪表客户密切合作。Reem 在马萨诸塞州伍斯特市的 WPI 获得电气工程硕士学位和学士学位。
Eric Aguilar 拥有技术学位(Cal Poly/USC),他的职业生涯始于在美国海军研究实验室为无人机制造传感器。这些传感器是解锁自主飞行和进一步提升无人机能力的基础。在海军服役期间,他加入了一家公司,该公司致力于将他的团队所从事的传感器商业化。这导致了一家名为“Lumedyne”的初创公司,该公司制造了一种运动传感器,后来被谷歌以 8500 万美元的价格收购。
埃里克随后转而开发自主系统。他是 Google[x] Project Wing 的航空电子设备负责人,并为其商业交付无人机启用了自主飞行。然后,他在特斯拉工作(并领导了一个 300 人的团队),负责 Model 3 的集成工作,以实现自动驾驶。他最近在 Argo AI(一家由福特和大众资助的自动驾驶公司)领导他们的机器人出租车车队的传感器集成工作。
Eric 现在是Omnitr on Sensors的首席执行官和联合创始人,也是Ascent Robotics的顾问。Omnitron 为传感器的硅工艺设计提供了新的自由度。该公司正在与领先的汽车供应商和机器人公司讨论建立合作伙伴关系。
审核编辑 黄昊宇
-
请问手机导航上面能精准的显示咸宁桂乡大道2号吗?2018-11-18 2313
-
精准时间同步应用于物联网:室内导航2019-12-25 2492
-
传感器在精准农业自动导航中有什么作用?2018-07-21 1806
-
惯性导航和GPS卫星导航结合的车载组合导航模块资料2018-03-21 1633
-
蓝牙测向如何解锁精准室内定位2022-07-19 2500
-
顶坚单北斗防爆智能手持终端:为矿产资源勘探提供精准导航2024-12-10 1141
-
安徽京准:北斗卫星授时系统解锁精准时刻及应用场景2025-06-09 854
-
低成本组合导航能实现精准导航定位2025-07-03 1229
-
开创视觉方案新范式!INDEMIND四目空间智能方案让导航从追求“精准”迈向“智能协同”2025-11-07 2666
-
多模态大模型驱动的复杂环境精准导航避障系统平台的应用2025-12-22 610
-
FOC:电机控制的 “精准导航系统”2025-12-24 1983
-
告别导航盲区!MEMS组合导航系统,精准定位2026-02-26 813
-
精准护航,全域领航:组合导航赋能无人机全场景作业2026-04-16 253
-
高性能MEMS陀螺仪:精准导航,引领未来科技新风尚2026-04-28 507
-
低成本组合导航系统:让精准导航不再昂贵2026-05-14 588
全部0条评论

快来发表一下你的评论吧 !
