

电机控制设计:高性能运动控制的微步
工业控制
描述
步进电机是由直流电驱动的无刷同步电机,分步旋转,在特定电源下保持转子静止。通过电子驱动器发送的明确定义的 PWM 脉冲序列使步进电机朝一个方向转动。
步进电机具有一项特殊功能 - 能够非常精确地将转子轴旋转几度,并且无需传感器来检测其角位置。简而言之,电机的一整圈可以分为一定的步数。步进电机的宽度决定步数。
在步进电机内部,定子上有几个环形排列的绕组/线圈,它们像电磁铁一样工作。定子将磁场转换为电流。制造商声明的步数对应于相互电连接的线圈组(称为相)的数量。在每组内,有几对并联的线圈。每个线圈对围绕定子布置并电连接。每个相位按顺序激活,以允许电机旋转,一次一个步骤。
步进电机通过与从微控制器输出到电机驱动器的脉冲信号同步,实现精确的定位和速度控制。电机驱动器通过在输出端向步进电机提供功率脉冲来对微控制器的信号作出反应。
步进电机由电脉冲操作,电脉冲依次馈入定子的一部分。定子的励磁顺序决定了旋转方向。通过微步进技术,可以获得更流畅和线性的运动以及更好的定位。有不同的微步模式,长度从 1⁄3 整步到 1⁄32 整步。
步进电机驱动器
步进电机构成增量运动驱动器。随着到达系统的每个命令脉冲,电机完成有限旋转。通过以给定的顺序和给定的电流方向为相供电来实现旋转(图 1和图2)。
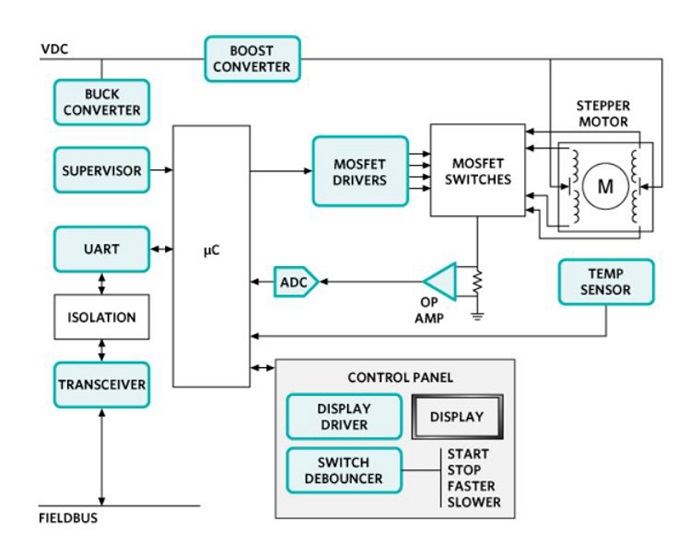
图 1:步进电机和主要组件的电气图(图片:Maxim Integrated)
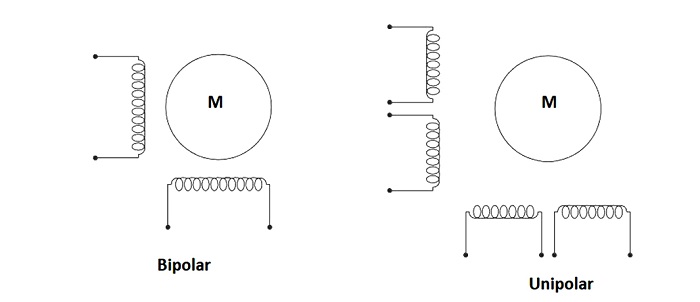
图 2:双极和单极电机的一般布局(图片:Maxim Integrated)
有不同的步进电机配置,甚至还有更多的驱动方式。最常见的定子配置是两个线圈。它们围绕定子的圆周布置,这样当用方波信号驱动时,电机就会转动。要使电机朝相反方向转动,只需将信号的 A 相和 B 相之间的比率反向即可。
步进电机的主要应用是机器人、办公自动化 (OA) 设备和医疗/护理设备,这些应用需要电机具有卓越的电机控制精度和更好的抗环境影响能力。旋转变压器和编码器等电机控制解决方案用于优化运动并保证电机的正确位置。
带有旋转变压器的步进电机即使在高温、灰尘或振动的恶劣环境中也能实现高精度电机控制,并最大限度地提高可用扭矩。旋转变压器是一种感应式位移传感器——一种用于测量角位移的机电设备。该装置检测螺线管中磁感应通量的变化。
例如,瑞萨电子公司开发了一种新的旋转变压器数字转换器(RDC),它支持美蓓亚三美的新型步进电机,以及用于控制带有 32 位 RX MCU 的 RDC 的控制驱动软件。瑞萨和美蓓亚三美已开发出基于传感器的步进电机和电机控制解决方案,可满足恶劣环境下的超精密应用要求(图 3)。
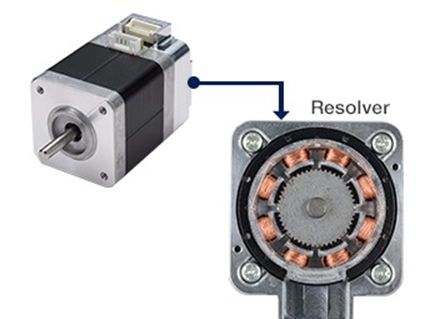
图 3:带旋转变压器的步进电机(图片:瑞萨电子)
Toshiba Electronic Devices and Storage Corp. 的驱动器解决方案采用主动增益控制 (AGC) 技术,可检测电机负载转矩并自动优化电机驱动电流。这可以防止电机打滑,同时简化高效电机控制。
Maxim Integrated 提供MAX15024 / MAX15025 MOSFET 栅极驱动器,适用于工作频率高达 1 MHz 且具有大容性负载的高频和大功率电路。MAX15024可以吸收8 A的峰值电流并产生4 A的峰值电流。集成的可调LDO稳压器提供栅极驱动幅度控制和优化。
Infineon Technologies AG 提供TLE 8444SL,这是一款适用于汽车和工业运动控制应用的受保护四半桥 IC,它基于公司的智能混合技术 SPT,将双极和 CMOS 控制电路与 DMOS 功率器件相结合。PG-SSOP-24-7 封装具有优势,因为它节省了 PCB 上的空间和成本。集成的保护和诊断功能提高了系统的可靠性和性能。
微 步步进电机与能够以电子方式分割电机机械步距的驱动器结合使用时,可以执行比整步更高的分辨率的定位。微步用于实现更高的步进电机分辨率,在低速时提供更平滑的运动。
例如,螺距角为 1.8° 的步进电机会导致电机每转一整圈(360 ÷ 1.8)旋转 200 步(分辨率)。这种离散运动导致电机旋转不完全平滑。
使用微步进技术减小电机步进的尺寸可以在低速下提供更平滑的运动。微步控制将每个完整的步进分成更小的值:例如,一个 1.8° 的螺距最多可以划分 256 次,提供每转 0.007° 的螺距角。
该数据表示位置的分辨率而不是其精度,这取决于发动机的机电精度,如发动机规格所示(优质混合动力发动机为 5%)。
微步使用脉宽调制 (PWM) 电压来控制电机电流。当一个绕组中的电流增加时,另一个绕组会减小。这导致平稳的运动。微步有时被认为是机械齿轮的一个很好的替代品,因为它不会在系统中引入反冲或降低最大系统速度(图 4)。
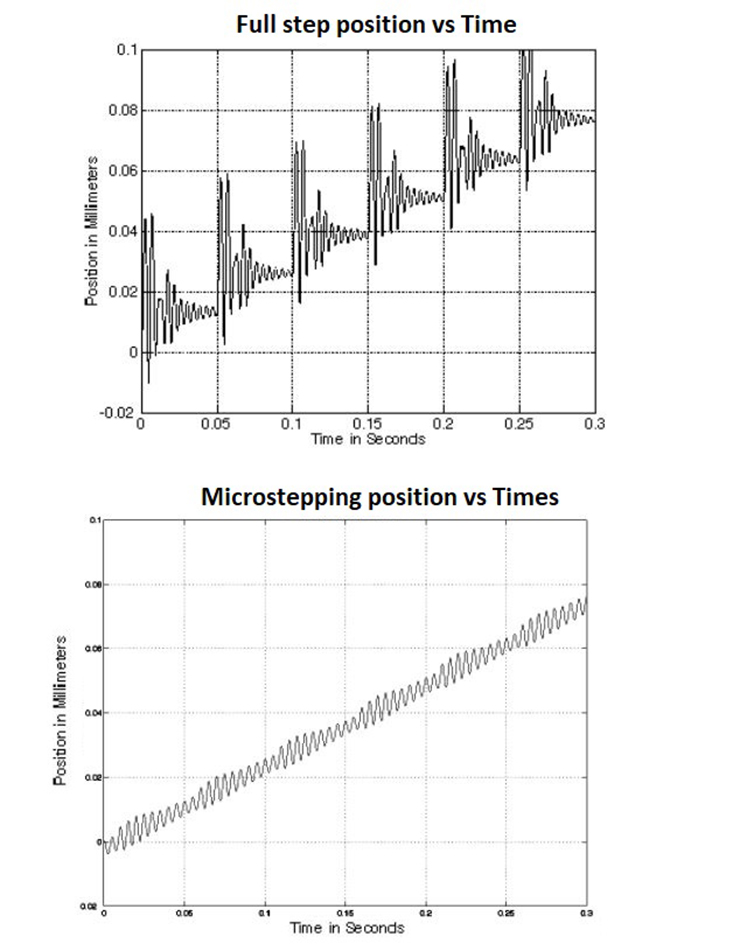
图 4:微步进显着减少了电机的位置振荡。(图片:多佛运动)
微步进可以在两个步骤之间获得大范围的中间位置。转子越接近平衡位置,相应相位中的电流就越大。
微步进更节能,使用更小、更频繁的脉冲,使步进电机的速度比平时略高。折衷方案是电机扭矩通常会略微降低。
市场上有多种集成微步进电机驱动器。一种解决方案是 Allegro MicroSystems 的A4988 DMOS 微步进电机驱动器,其输出驱动能力高达 35 V 和 ±2 A。A4988 采用表面贴装、5 × 5-mm、QFN 封装并提供运行能力在慢或混合衰减模式。混合衰减电流控制可降低可听电机噪声、提高俯仰精度并降低功耗(图 5)。
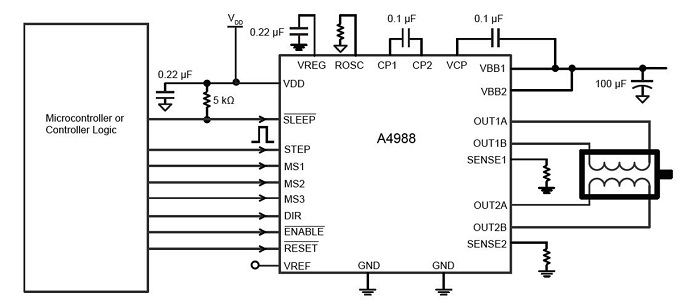
图 5:典型应用图(图片:Allegro Microsystems)
另一个例子是 STMicroelectronics 的L6470H dSPIN 微步进驱动器,它基于模拟混合信号技术构建。微步进驱动器集成了一个双路低 R DS(on) DMOS 桥,配有精确的电流检测电路和过流保护。数字控制内核通过一组专用寄存器进行编程。它还包括保护电路,提供完全受保护的设计,满足最苛刻的电机控制应用的要求(图 6)。
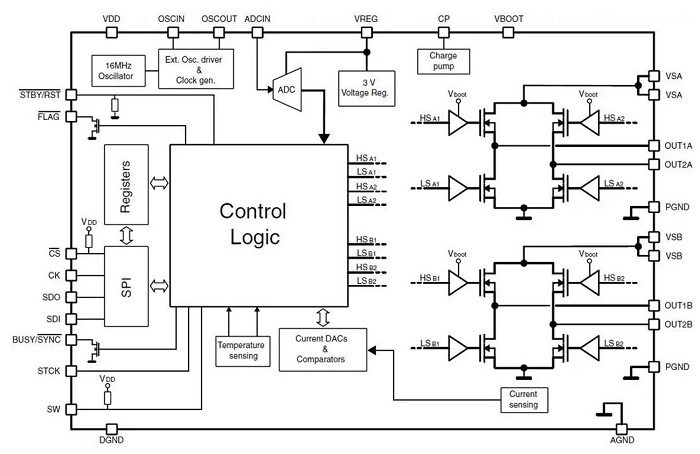
图 6:L6470H 的电路图(图片:ST Microelectronics)
采用德州仪器公司开发的 AutoTune 技术的DRV8880和DRV8881电机驱动器通过自动调整步进电机以获得最佳电流调节性能,同时补偿电机变化和老化效应。
采用 AutoTune 技术的驱动器能够通过 1/16 步以上的微步来配置关断时间 PWM 调制。它们可以并联以获得更高的输出电流,对于 DRV8880,它具有用于负载转矩控制的内部 DAC。
结论
步进电机可以通过数字电路(例如微控制器)轻松且精确地控制,而无需检测其角位置的设备。微步进用于在低速下实现更高的分辨率、能源效率和更平滑的运动。它提供了更线性的操作,消除了阶跃噪声和共振问题。
但是,使用微步进可以将扭矩降低多达 30%。因此,有必要评估电机的电气规格以选择合适的驱动器。
审核编辑:汤梓红
-
想让步进电机控制更顺滑?微步控制优势与挑战全揭秘!2025-02-19 2832
-
以色列ACS运动控制器~适用于高性能精密龙门平台#ACS #ACS运动控制器 #运动控制器#龙#硬声创作季电子知识科普 2022-10-22
-
伺服运动控制学习相关资料分享2021-06-28 1936
-
STM32步进电机运动控制是什么2021-07-08 1174
-
如何实现PMSM高性能控制2021-08-27 1300
-
高性能多轴运动控制器DMC2410功能简介2021-09-01 1935
-
一种高性能的步进电机运动控制系统设计2009-08-13 575
-
高性能数控系统运动控制算法的研究2016-05-03 581
-
基于PSoC3芯片的步进电机微步控制方案2017-01-14 871
-
TMC4361A是一种小型化、高性能的驱动步进电机的运动控制器2019-08-04 8331
-
步进电机控制/调速/驱动方法2023-03-07 13925
-
高性能运动控制的现代伺服技术2023-08-01 583
-
步进电机的微步驱动原理是什么2024-02-06 4176
-
运动控制卡伺服电机如何控制2024-06-12 2616
-
想让步进电机控制更顺滑?微步控制优势与挑战全揭秘2025-02-25 1627
全部0条评论

快来发表一下你的评论吧 !
