

机器人高性能电机控制设计师指南
今日头条
描述
作者:Maurizio Di Paolo Emilio,《电力电子新闻》主编
机器人操纵器可在三个或更多轴上进行编程,这些轴指定机器人的运动,无论是机械臂还是身体。这些机器人机械手无需物理修改即可自动控制和重新编程,并且可以适应控制系统的不同应用。最初设计用于处理恶劣或人迹罕至的环境中的应用程序,如今的工业系统越来越复杂,并集成了机器人,这些机器人以比人类更精确和更快的方式执行许多以前的手动操作。
机器人系统主要由四个子系统组成:机械、执行器、测量和控制。一个关键挑战是关节运动控制对低速和高扭矩的要求不允许有效利用伺服电机的机械特性,相反,在最佳操作条件下产生高速和低扭矩。
因此,驱动单元的功能是确保电机和负载的速度和扭矩兼容,并能够将机械扭矩从一个转移到另一个。传动部件还可以通过将电机定位在机器人底座上来减轻机械结构的重量,从而提高静态和动态性能。
关节运动委托给允许机械结构进行所需运动的电机。在永磁、直流(有刷)和电子换向(无刷)电动机这三种关键类型中,最能优化低惯性和高定位精度要求的是无刷直流电机或 BLDC。
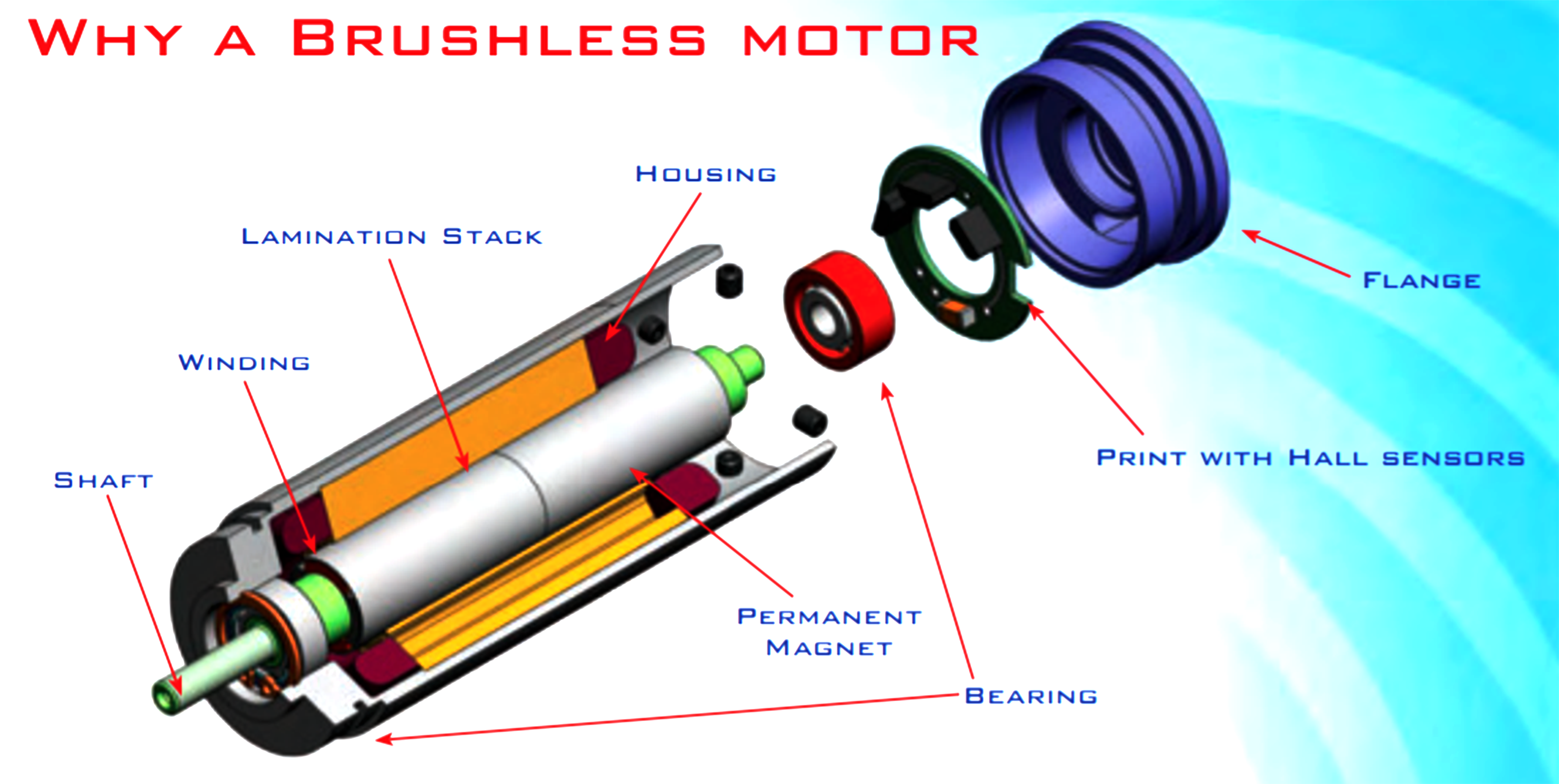
图 1:无刷直流电机图(图片:Portescap)
与使用机械开关的有刷电机相比,BLDC 没有机械开关,其中带电刷的旋转电枢用于进行电气连接。
运动部件的减少使无刷电机的使用寿命更长,仅受滚珠轴承磨损的限制。此外,绕组改善了散热和过载能力,与其他直流解决方案相比提供了更高的效率。
由于没有电刷,BLDC 还具有出色的耐用性和低噪音特性。主要有两种结构类型:表面永磁体(SPM)和内部永磁体(IPM)。SPM 电机的磁铁附在转子表面的外部。相反,IPM 电机将永磁体嵌入转子本身。
直流电机和驱动器 BLDC 提供高效率,但最重要的是,在许多应用中都具有出色的扭矩和速度值。他们使用带有旋转电枢的固定磁铁,该电枢结合了各种部件以提供电子开关。
BLDC 的设计旨在优化扭矩,扭矩代表电机的旋转力大小,与磁铁和线圈绕组有关。磁体中的极对数越多,电机转矩就越大。
一个例子是 Portescap 的 Ultra EC 平台,它由三个系列组成——ECS、ECT 和 ECP。根据扭矩和速度要求,这些无刷微型电机系列可用于各种应用。获得专利的 U 型线圈提供最小的铁损,从而提供良好的效率和更冷的操作(图 2)。

图 2:Portescap 的 Ultra EC 电机(图片:Portescap)
Maxon Motor AG 的 EC-i 无刷电机具有适合机器人应用的小直径。它们的直径为 30 毫米,具有高动态和高扭矩的特点。
EC-i 系列有多种尺寸可供选择,每种都有标准版和高扭矩版,在 75 W 时最大额定扭矩高达 110 mNm。在所有版本中,EC-i 30 电机都可以扩展带有编码器、齿轮箱、伺服控制器或定位控制器(图 3)。
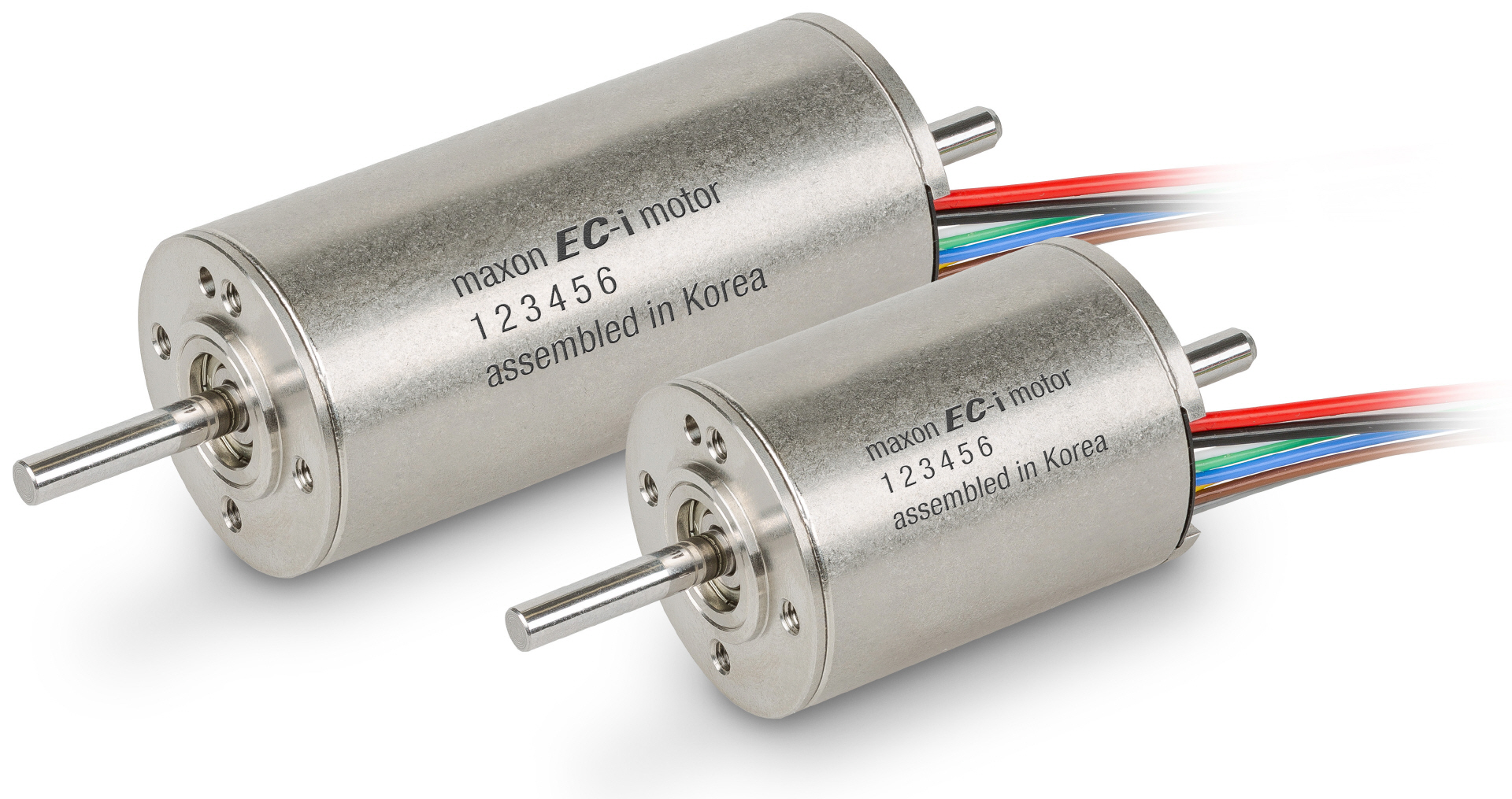
图 3:Maxon Motor 的 EC-i 电机(图片:Maxon Motor)
STMicroelectronics 与 Maxon 合作开发了一种新套件,以加速机器人和工业应用的设计。EVALKIT-ROBOT-1 套件可在机器人应用中提供精确定位。
该套件包含 ST 的 STSPIN32F0A 智能三相控制器和一个完整的逆变器级,内置 ST 功率晶体管,可连接到电机。STSPIN32F0A 包含关键的电机控制电路,包括一个 STM32F031C6 微控制器和一个采用紧凑型 7 × 7-mm VFQFPN 封装的三相逆变器驱动器(图 4)。
电机控制固件允许设计人员启动引擎并开始发送命令以轻松优化他们的项目。该套件包括一个 100 W Maxon BLDC 电机 (EC-i 40),内置 1024 脉冲增量编码器。还包括用于转子位置检测的霍尔传感器。
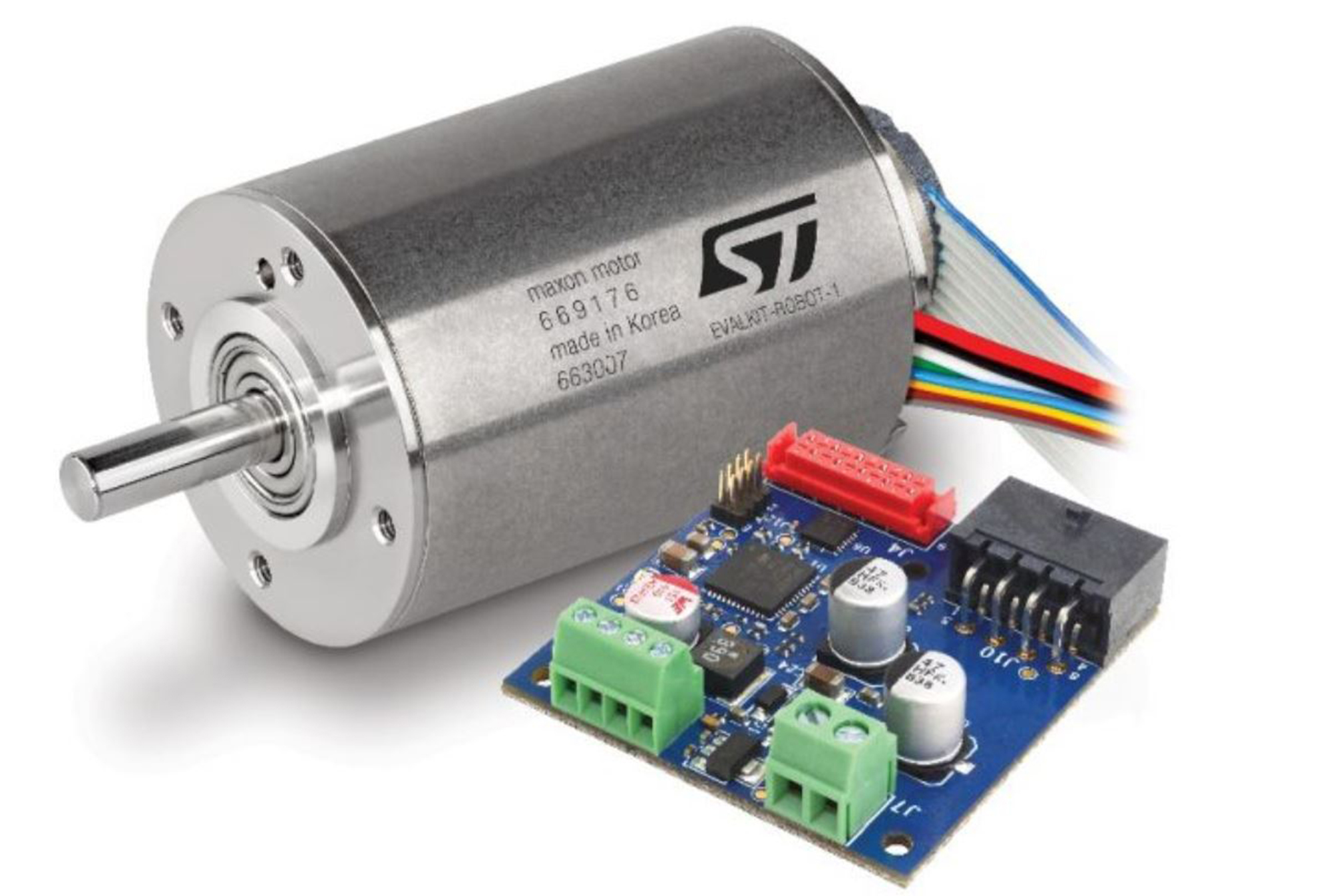
图 4:ST EVALKIT-ROBOT-1 开发套件(图片:意法半导体)
BLDC 电机非常高效,但为了满足日益严格的要求,公司不仅要改进电机的结构,还要改进驱动器的结构。特别是,他们正在努力降低整体能源消耗并优化热管理。
在许多情况下,这些设计包含可最大限度减少所需外部组件数量的集成驱动器和可实现高集成度的片上系统解决方案。好处包括节省空间和能源、提高整体系统可靠性和降低成本。
由于 BLDC 没有机械方式切换电流方向的结构,因此必须以电子方式完成。波形可分为两种主要类型:梯形和正弦。由于温度限制和成本,有时不使用传感器,根据三相电流或感应电压估计转子(磁铁)的位置。
驱动程序必须确保正确的电机控制,以便他们可以在应用中相应地控制速度和方向。现代微控制器 (MCU) 非常适合提供为直流(和交流)电动机开发高效控制回路所需的性能水平和计算功能。
许多 MCU 支持信号处理功能,允许使用定位数据实时处理复杂的算法。这很重要,因为越来越多的应用程序正试图消除提供定位数据的传感器。有许多 MCU 具有专为电机控制应用设计的外设。
例如,瑞萨电子的 RL78/G14 微控制器平衡了电流消耗水平和低电流消耗水平(CPU 运行时为 66 μ/MHz,待机或 STOP 模式下为 240 nA),提供高计算性能51.2 DMIPS (32 MHz)。集成的安全功能支持家用电器的安全标准 IEC/UL 60730。
在 BLDC 电机中,驱动器也变得更加复杂。速度和扭矩由瞬态的开/关持续时间比控制;通常,这采用用于驱动绕组的 PWM 信号的形式。这种情况因使用单相、两相和三相电机而变得更加复杂。今天,许多集成设备被用作驱动级。通常,它们包括栅极驱动器,用于驱动用于激励多达三相电机的外部功率 MOSFET。
当控制器电路在低电流信号上运行时,电机需要大量电流。所以电机驱动器的作用就是把低电流的控制信号转换成可以驱动电机的大电流信号。
Infineon Technologies AG 提供各种用于控制变速驱动器的集成产品。iMOTION IC 集成了无传感器磁场定向控制 (FOC) 所需的所有控制和模拟接口功能。此外,它们还采用了公司经过验证的电机控制引擎 (MCE) 算法,该算法消除了控制协议开发过程中的软件编码。
另一个节省空间的是德州仪器 (TI) 的智能栅极驱动器。这些驱动器集成了无源元件,以减少电路板尺寸、元件数量、复杂性和设计成本。它们还使设计人员能够优化开关和电磁干扰 (EMI) 性能。
在其广泛的驱动器产品组合中,TI 为 DRV8313 提供了三个可单独控制的半 H 桥驱动器。该器件设计用于驱动三相无刷直流电机,但也可用于驱动螺线管或其他负载。集成比较器允许构建限流电路或其他功能。
另一个例子是 Toshiba Electronic Devices & Storage Corp 的具有闭环速度控制功能的 TC78B025FTG 无刷三相电机驱动器 IC。该器件采用 4.5 V 至 16 V 电压范围的电源工作,并提供正弦驱动150°切换。0.2 Ω(典型值)的低导通电阻降低了 IC 在工作期间的自发热,从而扩展了对高驱动电流的支持。
电气隔离一般来说,电动机的设计人员都知道,必须遵守国际绝缘标准,以防止来自外部源的干扰,并确保用户的电气安全。数字隔离的使用提供了几个好处,包括更快的响应,允许集成过流保护并减少停机时间。这提供了更渐进的输出电压变化,从而改善了扭矩控制。
由于光电耦合器基于光电技术,因此它们是一种非常可靠的方法,可确保在没有任何物理接触的情况下实现电气隔离。与基于使用继电器等机电元件的传统方法相比,这提供了许多优势。主要优点包括无磨损运行、互补组件成本相对较低、电路板空间最小、抗电磁干扰、高可靠性和长使用寿命。
在电机驱动应用中,电路的两个主要部分需要隔离:绝缘栅双极晶体管的栅极驱动,或 IGBT(一侧具有集电极和发射极,另一侧由栅极驱动的器件),桥式逆变器和电机中的电流相位检测。相电流检测为 IGBT 提供保护并为控制器提供反馈,以保持对闭环电流的控制。
以下是一些可用于机器人应用的光电耦合器示例:
Renesas Electronics Corp. 的 RV1S92xxA 和 RV1S22xxA 光电耦合器封装长度为 2.5 mm,与类似器件相比,PCB 面积减少了 35%,有助于设计人员减小机器人系统的尺寸。由于增强绝缘,RV1S92xxA 和 RV1S22xxA 允许 200-V 和 400-V 系统超过安全标准。所有设备均符合严格的 UL61800-5-1 电机控制标准和 UL61010-2-201,适用于 PLC 等控制系统(图 5)。
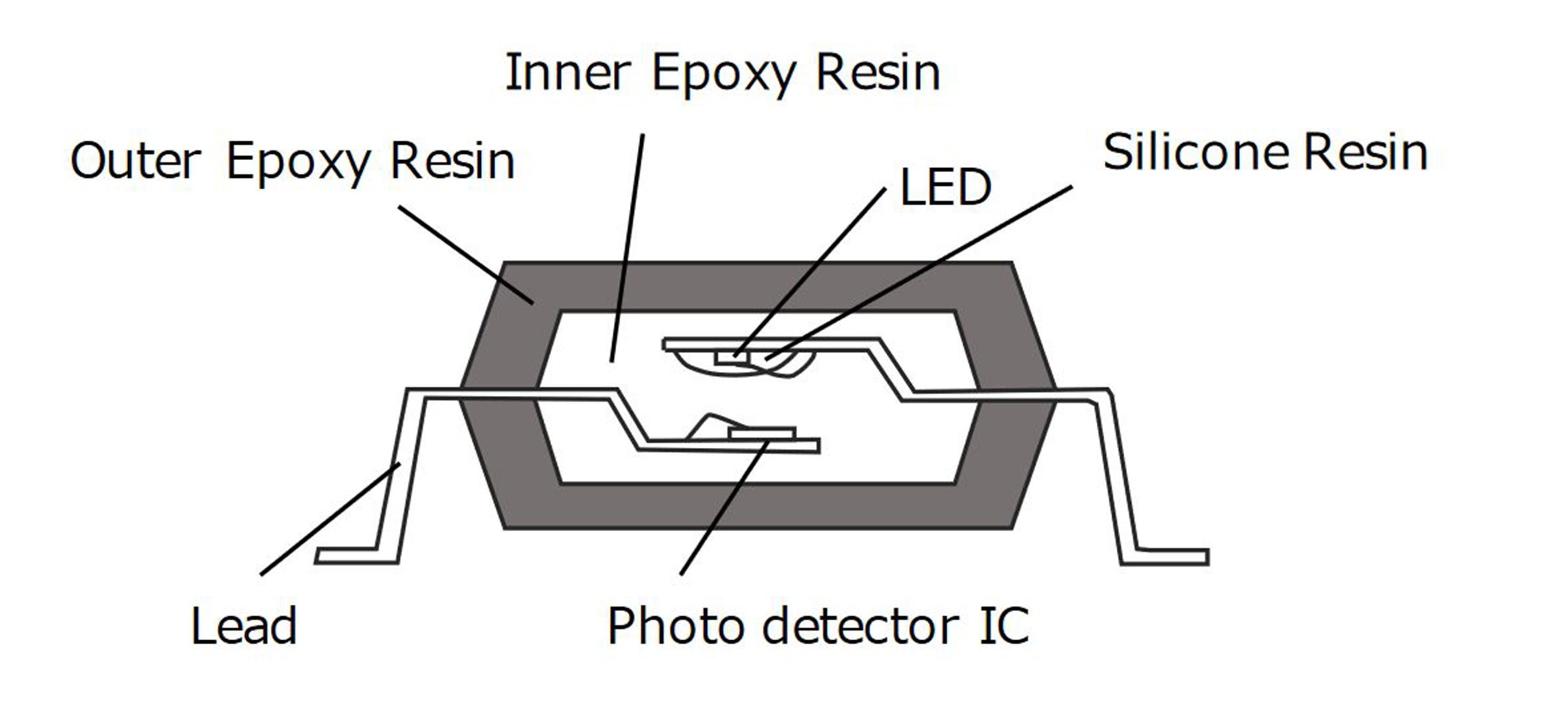
图 5:瑞萨电子 RV1S92xxA 和 RV1S22xxA 的横截面图(图片:瑞萨电子)
Toshiba 的 TLP5214 是一款高度集成的 4A 输出电流 IGBT 栅极驱动光电耦合器,采用 SO16L 封装。TLP5214 具有先进的内置功能,例如 IGBT 去饱和检测、隔离故障状态反馈、软 IGBT 关断、有源米勒阻断和欠压阻断 (UVLO)。它适用于驱动逆变器应用中使用的 IGBT 和功率 MOSFET。
结论无论电机是用于工业还是非工业操作环境,具有精确定位能力的高端运动控制的设计都是复杂的,需要极其可靠的驱动解决方案和优化的机械结构。
近年来,电动机也与无人机和农业 4.0 等新兴机器人应用相关联,得益于快速原型制作、专用操作系统和集成控制系统等新制造系统,这些应用得到了加速发展。
审核编辑 黄昊宇
-
机器人制作资料宝典【日本顶尖机器人设计师经典教材】2012-01-10 155144
-
机器人书籍大全!强烈推荐2015-02-22 35927
-
辰汉-如何实现服务机器人的运算与控制2017-06-09 3003
-
RoboMaster发布M2006动力系统!体积小、性能强,助力高性能机器人开发2018-05-11 15204
-
如何选择机器人电机2018-10-19 2731
-
选择机器人电机的几点思考2019-03-12 4251
-
如何设计智能灭火机器人控制器?2019-07-31 3981
-
【设计技巧】不会选电机,还做什么机器人2019-08-10 2329
-
ABB机器人维修保养指南2020-08-19 6037
-
机器人运动控制技术2021-07-28 2372
-
四足机器人的机构设计2021-09-15 2145
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 2614
-
浅谈儿童陪护机器人2023-05-11 1183
-
机器人的高性能连接2023-01-03 1242
-
TRIZ如何在机器人电机控制设计中提高系统性能?2024-03-11 1135
全部0条评论

快来发表一下你的评论吧 !
