

亚太赫兹阵列传感器可以在极端天气条件下“看到”
电子说
描述
作者:Gina Roos,主编
麻省理工学院的研究人员开发了一种亚太赫兹辐射接收系统或阵列,可用于补充自动驾驶汽车中使用的基于红外的 LiDAR 成像系统。麻省理工学院表示,基于光的图像传感器通常在雾气等极端环境条件下遇到问题,而电磁光谱上的微波和红外辐射之间的亚太赫兹波长可以通过雾气和尘埃云检测到。
以下是亚太赫兹成像系统的工作原理:“为了检测物体,亚太赫兹成像系统通过发射器发送初始信号;然后接收器测量反射的亚太赫兹波长的吸收和反射。这会将信号发送到重新创建对象图像的处理器。”
然而,麻省理工学院表示,将亚太赫兹传感器应用到车辆中存在一些挑战。其中包括需要从接收器到处理器的强输出基带信号。问题在于,许多现有的分立元件解决方案体积大且价格昂贵,而且较小的片上传感器阵列会产生微弱的信号。
麻省理工学院的研究人员在 IEEE Journal of Solid-State Circuits 发表的一篇论文中表示,他们开发了一种“芯片上的二维、亚太赫兹接收阵列,其灵敏度要高几个数量级”,因此它可以在具有大量信号噪声的环境中捕获和解释亚太赫兹波长。
图片:麻省理工学院。
该论文的作者是麻省理工学院微系统技术实验室(MTL)电气工程和计算机科学副教授、太赫兹集成电子组主任韩若楠,以及博士胡志和王成。 韩氏课题组电气工程与计算机科学系的学生。
“这项工作的一个重要动机是为自动驾驶汽车和无人机提供更好的‘电眼’,”韩在一份新闻稿中说。“当环境恶劣时,我们的低成本片上亚太赫兹传感器将与 LiDAR 起到补充作用。”
麻省理工学院表示,接收阵列基于外差探测器,这是一种独立的信号混合像素方案,通常难以密集集成到芯片中。然而,研究人员能够缩小探测器的尺寸,以将其中的许多探测器安装在芯片上。
该论文称,“外差传感器将输入信号与强本地振荡器 (LO) 信号混合,能够产生比平方律检测器更高的基带输出和灵敏度”,从而解决了对强输出基带的需求信号。
麻省理工学院表示,该设计的核心是单个像素,即“外差”像素,它产生两个传入的亚太赫兹信号和本地振荡之间的频率差,本地振荡是一种改变输入频率频率的电信号。这就是产生兆赫兹范围内的信号的原因,该信号可由基带处理器解释。
输出信号计算物体的距离,类似于激光雷达的工作原理。像素阵列的输出信号使场景的高分辨率图像能够用于检测和识别物体。
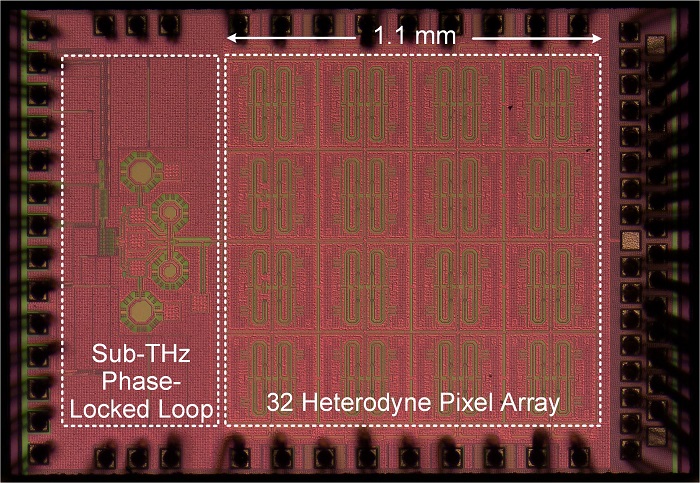
麻省理工学院表示,该原型是一个集成在 1.2-mm 2器件上的 32 像素阵列,其 灵敏度比当今片上亚太赫兹阵列传感器的像素提高了约 4,300 倍。
麻省理工学院表示,外差像素阵列只有在来自所有像素的本地振荡信号同步时才能工作,从而引导设计人员采用分散式设计来解决可扩展性问题。麻省理工学院表示,随着阵列扩大,每个像素共享的功率会降低,这会降低取决于本地振荡信号功率的输出基带信号强度。这意味着每个像素产生的信号可能很弱,导致灵敏度低。
在分散式设计中,每个像素生成自己的本地振荡信号,用于接收和下混输入信号。集成耦合器同步其自身的本地振荡,为每个像素提供更多输出功率。在这种设计中,每个像素都提供高灵敏度。
缺点是每个像素的占用空间要大得多,这对高密度阵列设计来说是一个挑战。因此,研究人员将天线、下混频器、振荡器和耦合器组件组合成每个像素的单个组件,从而实现“32 像素的分散设计”,麻省理工学院表示。锁相环(锁定到 75MHz 参考)确保 32 个本地振荡信号稳定。
“我们为芯片上的[分散]设计设计了一个多功能组件,并结合了一些离散结构来缩小每个像素的大小,”胡说。“即使每个像素执行复杂的操作,它仍然保持其紧凑性,因此我们仍然可以拥有大规模的密集阵列。”
审核编辑 黄昊宇
-
两类无源传感器的分析2010-04-13 3139
-
热电堆阵列传感器(8*8或16*4)如何实现多人识别?2016-02-17 6213
-
关于人体红外阵列传感器的使用2017-03-23 8603
-
基于TSL1401R线性阵列传感器的子板2020-03-06 1949
-
满足极端条件下的密封要求2009-05-16 1218
-
恶劣天气条件下LED透雾性的研究2010-04-20 1436
-
可在多种复杂条件下检测出光强的传感器装置2015-12-31 680
-
Nyxel 2是用于在低至无环境光条件下运行的图像传感器2020-03-11 3711
-
vivo宣布推出全新的RGBW阵列传感器,号称进光量提升160%2020-09-07 1228
-
校准气体传感器的条件是什么2022-03-09 1281
-
在高强度照明条件下使用 Interline CCD 图像传感器2022-11-15 642
-
最大的热电堆阵列传感器是什么型号2022-12-02 3938
-
提高电容式触摸键盘在极端天气条件下的稳健性2024-09-14 471
-
奥德赛Odyssey电池PC925极端天气下维护方法2025-05-19 1260
-
极端条件下稳定工作的量子传感器问世2025-09-18 433
全部0条评论

快来发表一下你的评论吧 !
