

机器人视觉相机设计师指南
今日头条
描述

本文是视觉引导机器人 AspenCore 特别项目的一部分。随着相机成本和尺寸的下降以及图像处理软件功能的增强,机器人系统正在出现新的视觉引导应用程序,尤其是那些使用 3D 的应用程序。这个特别项目通过一系列相互关联的文章来探索围绕这项技术的硬件、软件和业务问题,这些文章列在这篇文章的末尾。
机器人快速准确地抓取和操纵物体的能力使其非常适合执行重复、危险或令人筋疲力尽的任务,例如零件检查、在雾、火或水下操作或焊接。作为收集和分析信息的传感器,摄像头对于机器人导航景观和避免与附近物体发生碰撞至关重要。不同类型的相机技术包括 2D 成像、3D 传感、超声波和红外线。
机器人视觉相机背后的技术类型2D 成像技术 对于不需要深度或距离信息的机器视觉机器人来说,传统的二维数码相机是最受欢迎的选择。虽然数码相机看起来像胶片相机,但它们基于完全不同的科学原理。与投射数百万个微小彩色光点或像素来组成图像的电视不同,数码相机捕捉从物体反弹的光粒子(光子)并将它们转化为电信号或像素,存储为数字。数码照片是一长串描述每个像素的数字。在屏幕上,一长串数字被转换成构成图像的像素。二维数码相机有两种类型:电荷耦合器件(CCD)和互补金属氧化物半导体(CMOS)。CCD 相机比 CMOS 相机提供更高的分辨率和更低的噪音,但也更昂贵且能效更低。这里有一个极好的选择 2D 相机的指南。此外,最近的创新为 2D 相机增加了新功能。例如,Pinnacle 的高动态范围技术能够帮助 2D 摄像机捕获更好的视频和图像。

图 1:照片显示了使用不同动态范围拍摄的两张不同图像。具有高动态范围能力的那个(右)产生了更好的结果。(图片:Pinnacle 成像系统)
优点:二维相机对物体识别很有效。他们可以清晰地定义目标的边缘,并以高分辨率收集目标的许多细节。
缺点:二维相机对环境中的光线条件敏感。他们还将镜像识别为第二个对象而不是图像。最后,图像捕捉是一个缓慢的过程,需要相机和物体相对静止。
对于需要获取 3D 信息的场景,采用超声波、红外或 3D 传感技术的相机可能更合适。
3D 传感技术 3D 传感是机器人导航的强大工具,因为它提供有关物体的体积、形状、位置、方向和距离的信息。3D 数据可以通过立体视觉、结构光和激光三角测量等不同过程生成。立体视觉使用来自一个位置的多个 2D 相机或不同位置的一个相机的图像使用三角测量原理计算深度。
结构光非常适合使用投影光模式和 2D 相机系统测量物体的 3D 形状。通过分析观察到的条纹图案,可以收集到关于物体深度的大量信息。
激光三角测量使用 2D 相机和激光。激光将一条线投射到目标区域,二维相机捕捉反射的激光束。可以从多张照片上的激光束弯曲计算出物体的轮廓。但是,它比较慢并且只能处理静止图像,这意味着必须中断一个进程来收集数据。
优点:3D传感技术在近距离测量物体时精度高,分辨率优于超声波和红外,在环境杂乱时更可靠。特别是,激光三角测量适用于棘手的表面或环境光低的情况,即使对于低对比度的物体也能提供精确的数据。
缺点:3D 感应技术无法识别镜子或玻璃,因为它们会将反射识别为第二个物体。此外,它们对光照条件敏感,当环境过于单调且缺乏特征时表现不佳。此外,它们速度慢,只能处理静止图像,这意味着必须中断一个进程来收集数据。最后,3D 传感中使用的相机价格昂贵、体积庞大且难以校准。
有关 3D 成像技术的更多信息,请查看这篇关于 3D 视觉方法的EDN 文章。
超声波技术 也称为声纳相机,超声波相机通过测量声波的传输和接收之间的时间间隔来测量相机和物体之间的距离。超声波相机还可以检测附近的其他超声波传感器或其他带有超声波传感器的机器人。
优点:超声波相机比其他类型的传感器具有更长和更宽的范围。它们不会受到光照条件(过多或不足)或空气颗粒(如灰尘、烟雾、薄雾、蒸汽和棉绒)的影响。此外,它们不受物体的颜色、透明度或反射特性或表面纹理的影响。因此,超声波相机适用于测量液位和距离、检测物体以及避免在陆地或水下发生碰撞。
缺点:超声波相机在定义目标边缘方面很差。此外,它们适用于具有高密度和反射表面的目标,但不适用于泡沫或布等低密度物体。它们还受到噪音、温度、湿度和压力的影响。最后,它们需要最小的感应距离,并且无法检测到太近的物体。
红外线技术 红外线传感器通过检测物体发出的红外线 (IR) 来工作。他们还可以通过将红外光投射到物体并接收反射光来计算目标物体的距离或接近度。
优点:红外传感器可以大面积检测红外光,实时运行,性价比高。它们非常适合定义物体的边缘,并且比超声波传感器更有助于识别一个物体和另一个物体。例如,它们有助于识别人和其他受热物体,并将它们与反射图像(例如镜子)区分开来。此外,红外摄像机使您能够在烟雾或雾等低能见度条件下进行观察。与超声波相机一样,红外相机可以检查表面下的材料,并已在建筑绝缘检查或泄漏检测中得到应用。
缺点:IR传感器对IR光和太阳光非常敏感,只能在弱光下使用。此外,红外传感器并非对所有材料都同样适用,因为材料传输和折射红外光的方式不同。
选择使用哪种类型的相机每种传感器类型都具有使其更适合某些任务而不太适合其他任务的特性。例如,超声波传感器适用于固体物体,但不适用于柔软或模糊的物体。此外,它们也不善于区分一个对象和另一个对象。另一方面,虽然 3D 传感相机提供了很高的精度,但它们无法在黑暗或水下工作。因此,在开始选择相机之前,必须编译机器人目标的属性、机器人将运行的条件以及机器人任务的目标。
摄像头安装是另一个考虑因素:将摄像头安装在机器人手臂末端附近可以让您更仔细地观察物体并获得更好的分辨率,但这也意味着摄像头将随着机器人移动,并且机器人必须在图像显示时停止采取。如果您固定相机的位置,您将牺牲分辨率以获得连续成像。相机技术开发商正在迅速整合先进技术。例如,FLIR Systems 的 FLIR Firefly 相机系列能够集成相机和视觉处理单元 (VPU),并增加人工智能能力。
图 2:FLIR Systems 的 FLIR Firefly 摄像头系列集成了摄像头和英特尔的 Movidius Myriad 2 视觉处理单元 (VPU)。
现在有无数的摄像头可用于视觉引导机器人,而且每天都会有更多的摄像头出现。为了帮助您沿着选择路径进行选择,下面提供了一个流程图,可帮助您确定最适合您需求的相机类型以及代表性相机供应商图表,以便您开始搜索。
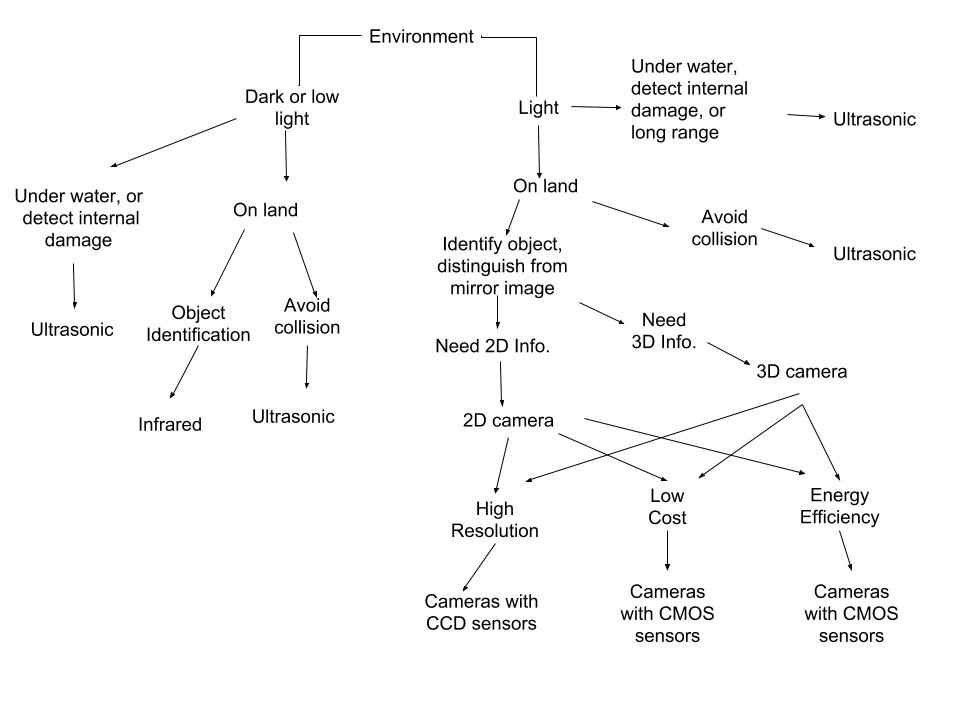
相机选择流程图
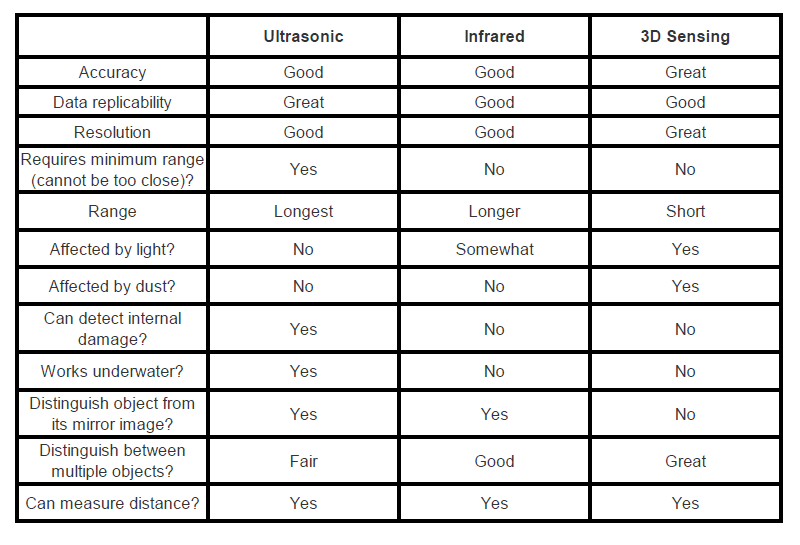
相机属性
审核编辑 黄昊宇
-
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用2025-05-03 3478
-
工业机器人与视觉实训平台介绍2021-07-01 1967
-
机器人视觉与机器视觉有什么不一样?2020-08-28 2735
-
服务机器人的视觉系统怎么设计?2020-04-07 3504
-
基于图像的机器人视觉伺服系统该怎么设计?2019-09-27 4497
-
机器人的自主决策可靠吗?机器视觉在智能领域占据什么地位?2019-08-16 3452
-
机器人视觉与计算机视觉有什么不同?2019-06-21 5573
-
机器人与CCD2017-08-18 3860
-
Arduino机器人制作指南2017-06-14 4647
-
面向机器视觉系统的CCD数字相机设计2016-09-18 1048
-
视觉机器人的发展现状与趋势2016-09-08 5488
-
【mBot申请】视觉机器人2015-10-29 2801
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
-
机器人制作资料宝典【日本顶尖机器人设计师经典教材】2012-01-10 155466
全部0条评论

快来发表一下你的评论吧 !
