

设计师指南:向智能运动控制发展的电机驱动器
工业控制
描述
随着机器人技术、工业自动化和物联网的兴起,对复杂电机控制的需求急剧增加。但无传感器操作和复杂算法(例如面向场的控制)通常需要复杂的编程和强大的计算,这使许多开发人员无法接触到它们。然而,更新的控制电机驱动芯片正在进入市场,在非专家的能力范围内带来平滑、精确和节能的运动控制。
最基本的,电动机是一个简单的概念。它由永磁体和围绕形成旋转轴的驱动轴布置的电场线圈组成。当励磁线圈通电时,它们以某种方式吸引永磁体,从而导致驱动轴旋转以使两者对齐。通过适当调整励磁线圈通电的方式,可以使这种运动连续进行。当对齐几乎完成时,只需将能量依次切换到下一个线圈(称为换向的过程)以重新定位对齐点。就像用遥不可及的胡萝卜牵着驴子一样,结果是马达一直在转动。
第一台实用的电动机早在 1834 年就出现了,从那时起,其尺寸和类型不断增加。今天,我们拥有为卡车和汽车提供动力的大型电动机,为手掌大小的四轴飞行器提供动力的微型电动机,以及介于两者之间的一切。电机类型现在包括交流同步和感应类型以及具有机械(有刷)和电子(无刷)换向的直流电机。在这些广泛的类别中也有许多变化。
对于许多开发人员来说,电机的操作似乎也很简单:你通电,它就会旋转。但除此之外还有很多事情要做,电机运行的精确控制在机器人技术和许多其他系统中变得越来越重要。此外,不同类型的电机需要不同类型的控制,从而增加了更多复杂性。
运动控制中最流行的两种电机类型是步进电机和无刷直流 (BLDC) 电机。步进电机,顾名思义,是交流电机的一种变体,设计用于以小而离散的弧线或步进方式旋转。他们可以在步骤之间暂停以提供一种设置和保持位置的运动。另一方面,BLDC 电机设计用于连续旋转。当需要精确的运动控制时,两者都常用,具体选择取决于应用。
机器人技术的兴起带来了对精密运动控制的需求增加,而新的 IC 正在降低难度。
但是,要提供受控运动,您需要知道电机在其旋转弧中的位置。这些知识不仅对于确定位置至关重要,而且有助于控制电机的速度。有些旋转编码器传感器可以夹在驱动轴上以提供此信息,或者有些无传感器方法使用来自励磁线圈的反电动势。
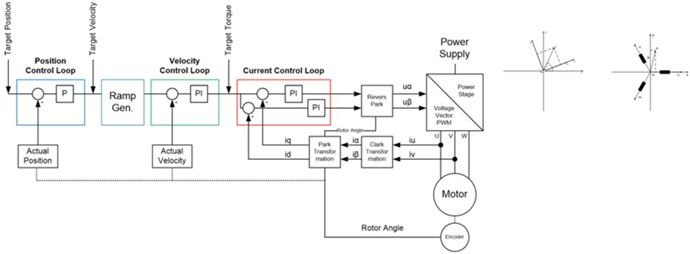
在大多数情况下,您还需要控制运动的速度:速度、加速度,甚至“jerk”,即加速度的时间导数。您可以通过调制驱动励磁线圈的电流来实现此控制,并且该电流会随着旋转位置、电机质量、驱动轴上的负载和电机的磁动力学而变化。因此,这个看似简单的操作很快就被证明是电机控制回路理论中的一个复杂问题。许多越来越复杂的控制回路方法已经发展起来,通常以其驱动波形的基本形状命名,包括正弦、梯形和磁场定向控制,也称为矢量控制。因此,针对给定应用优化运动控制可能需要大量的知识和专业知识。
高级电机控制算法似乎令人生畏,但供应商正在通过库、工具甚至预编程设备加强对开发人员的支持。
幸运的是,您不再需要成为控制回路和电机专家即可获得合理程度的精确运动。公司已开始创建电机控制器,有时称为运动控制器或运动处理器,这些算法 在不同程度上预先编程了这些算法。在某些情况下,它们是参数化的,因此您只需要输入一些有关您的电机选择的数据。从那里,您只需向设备发送您的运动命令,其余的就交给它了。这些智能电机控制设备大大降低了设计的复杂性。
步进电机尤其受益于电机控制芯片的进步。步进式移动机械会产生机械噪音,但通过控制加速度和加加速度,步进器可以提供快速平稳的运动,机械噪音最小。如本视频 所示,使用先进控制算法的智能步进控制也可以平滑运动。
然而,向预配置电机控制的转变才刚刚开始,因此运动控制芯片具有多种功能级别。Infineon、IDT、STMicroelectronics、Toshiba和Texas Instruments等行业巨头为电机控制器提供库软件和工具支持,以实现 FOC 和无传感器操作等高级算法。其他公司,如Active-Semi、Broadcom、Performance Motion Devices (PMC)和Trinamic,通过提供完全预编程的设备来自动处理大部分复杂性,从而展开竞争。
由于该行业瞬息万变,因此从事电机和运动控制工作的开发人员应在做出选择之前查找有关最新介绍的新闻。通过牢记您将控制的电机类型、速度和负载限制、无传感器操作的任何要求以及您想要使用哪种控制算法来评估设备。芯片通常专注于这些领域中的一个或多个。如果您能找到一个满足您所有参数并提供大量库甚至预编程的设备,您将节省大量精力,可以花在完善您的应用程序上,而不是调整运动控制。
-
基于STM32CUBEMX驱动低压步进器电机驱动器STSPIN220(2)----驱动STSPIN2202023-12-01 3526
-
伺服电机驱动器电路图分享2024-02-04 17637
-
TI 旋转电机-电机驱动与控制解决方案指南2025-03-18 3282
-
智能电机未来的发展趋势是什么2019-03-18 3239
-
适用PLC使用的步进电机控制驱动器2009-06-18 3084
-
步进电机驱动器及细分控制原理2016-01-12 1554
-
机器人高性能电机控制设计师指南2022-08-19 1181
-
步进电机驱动器原理_步进电机驱动器接线2023-03-08 5327
-
浅谈步进电机驱动器TB5128FTG芯片的测试经验2023-05-19 5706
-
伺服驱动器与运动控制器之间的区别是什么?2023-07-10 2834
-
如何在工业驱动器中实现精密的运动控制2023-08-24 1192
-
步进电机驱动器拨码开关怎么调2024-01-15 7332
-
电机驱动器的智能控制算法研究2024-06-25 2394
-
步进电机驱动器有哪些类型?该如何分类?2024-10-24 2119
-
DRV8434步进电机驱动器:高效集成与智能控制的完美结合2026-01-08 404
全部0条评论

快来发表一下你的评论吧 !
