

cartography框架安装与建图测试
电子说
描述
cartgrapher这个框架是google在2016年开源出来的框架,该框架可以接入2D激光、3D激光、里程计、IMU传感器的数据,输出2D地图或者是3D地图。同时该框架还有一个比较有特色的功能就是他可以增量式更新地图,当cartgrapher 运行在定位模式时,可以在定位的同时增量式更新已有的地图。
cartographer安装
网络上有很多安装cartographer的教程:
https://www.cnblogs.com/hitcm/p/5939507.html
基本上按照这些教程或者是官网提供的教程不存在其他问题,唯一的问题就是直接从github上拷贝的速度很慢,可以使用国内别克隆下来的代码。
根据官网的方式下载源码:
https://google-cartographer-ros.readthedocs.io/en/latest/compilation.html#building-installation
在下载的时候需要修改ceres-solver地址为:
https://github.com/ceres-solver/ceres-solver.git (使用命令vim src/ .rosinstall)
或者去我的仓库:(https://gitee.com/cenruping/google_cartgrapher)进行下载,将src目录下的三个压缩包进行解压。
2D建图测试
这里我们首先测试官网上的demo,然后再我们自己的机器人上进行测试。这里我们运行的是官网上的 Pure localization 部分的数据集。
1.启动2D 建图demo
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=/media/crp/0E3C06880E3C0688/b2-2016-04-05-14-44-52.bag
bag_filename表示的是ROS bag的数据包。
注意:
这里我们把官网上的offline_backpack_2d.launch 文件替换为了 demo_backpack_2d.launch,这是由于我们发现 offline_backpack_2d.launch 这个文件没有启动地图保存服务。
先将地图保存为 .pbstream 文件
rosservice call /write_state ~/cartograph_test.pbstream
用cartographer自带的转换节点将.pbstream 文件转化为pgm和yaml文件
rosrun cartographer_ros cartographer_pbstream_to_ros_map -pbstream_filename /home/crp/cartograph_test.pbstream -map_filestem /home/crp/cartograph_test
动节点以后可以看到文件夹下生成的pgm 和 yaml文件
但是如果你需要使用cartographer进行定位的话,就没有必要去转换为pgm格式的。
2.启动2D 定位demo
接下来我们使用已有的地图进行定位
roslaunch cartographer_ros demo_backpack_2d_localization.launch load_state_filename:=/home/crp/ cartograph_test.pbstream bag_filename:=/media/crp/0E3C06880E3C0688/b2-2016-04-27-12-31-41.bag
其中cartograph_test.pbstream 是我们上一个步骤中生成的一个地图文件,bag_filename:表示的是当前输入的激光雷达的数据
其中定位数据是输出在TF坐标系中的。
3.在kobuki机器人上实现建图
这里我们是参考demo的历程来配置参数文件的,这里主要需要注意lua文件中的几个坐标系的配置。经过我自己的尝试
a) 在只使用激光雷达的时候(tracking_frame=”laser”, publish_frame=”laser”)
b) 使用里程计+激光雷达时(tracking_frame=”base_link”, publish_frame=”odom”)
c) 使用IMU+激光+里程计时(tracking_frame=”imu_link”, publish_frame=”odom”)
其余参数只要参考demo里面的进行配置就可以了,我所使用的launch文件(” kobuki_robot.launch”)和lua(“kobuki_robot.lua”)文件配置如下:
kobuki_robot.launch
"urdf_file" default="$(find xacro)/xacro --inorder '$(find kobuki_description)/urdf/kobuki_standalone.urdf.xacro'"/>"robot_description" command="$(arg urdf_file)"/>"robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen">"publish_frequency" type="double" value="5.0"/>"joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">"use_gui" value="true"/>"cartographer_node" pkg="cartographer_ros"type="cartographer_node" args="-configuration_directory $(find cartographer_ros)/configuration_files-configuration_basename kobuki_robot.lua"output="screen">"scan" to="/scan" />"odom" to="/odom" />"cartographer_occupancy_grid_node" pkg="cartographer_ros"type="cartographer_occupancy_grid_node" args="-resolution 0.05" />"rviz" pkg="rviz" type="rviz" required="true"args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" />
kobuki_robot.lua
include "map_builder.lua"include "trajectory_builder.lua"options = {map_builder = MAP_BUILDER,trajectory_builder = TRAJECTORY_BUILDER,map_frame = "map",tracking_frame = "base_footprint",published_frame = "odom",odom_frame = "odom",provide_odom_frame = false, --算法内部提供里程计publish_frame_projected_to_2d = false,use_odometry = true, --使用里程计use_nav_sat = false,use_landmarks = false,num_laser_scans = 1,num_multi_echo_laser_scans = 0,num_subdivisions_per_laser_scan = 1,num_point_clouds = 0,lookup_transform_timeout_sec = 0.2,submap_publish_period_sec = 0.3,pose_publish_period_sec = 5e-3,trajectory_publish_period_sec = 30e-3,rangefinder_sampling_ratio = 1.,odometry_sampling_ratio = 1.,fixed_frame_pose_sampling_ratio = 1.,imu_sampling_ratio = 1.,landmarks_sampling_ratio = 1.,}MAP_BUILDER.use_trajectory_builder_2d = trueTRAJECTORY_BUILDER_2D.submaps.num_range_data = 35TRAJECTORY_BUILDER_2D.min_range = 0.3TRAJECTORY_BUILDER_2D.max_range = 8.TRAJECTORY_BUILDER_2D.missing_data_ray_length = 1.TRAJECTORY_BUILDER_2D.use_imu_data = falseTRAJECTORY_BUILDER_2D.imu_gravity_time_constant = 9.8TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = trueTRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.1TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.translation_delta_cost_weight = 10.TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1e-1POSE_GRAPH.optimization_problem.huber_scale = 1e2POSE_GRAPH.optimize_every_n_nodes = 35POSE_GRAPH.constraint_builder.min_score = 0.65return options
下面是一个在实验室里面录制的视频:
4.在kobuki上基于已有地图定位
接下来我们使用以及建立好的地图进行定位,同时进行增量式更新地图(注意地图右上角区域)kobuki_localization.launch
"urdf_file" default="$(find xacro)/xacro --inorder '$(find kobuki_description)/urdf/kobuki_standalone.urdf.xacro'"/>"robot_description" command="$(arg urdf_file)"/>"robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen">"publish_frequency" type="double" value="5.0"/>"joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">"use_gui" value="true"/>"cartographer_node" pkg="cartographer_ros"type="cartographer_node" args="-configuration_directory $(find cartographer_ros)/configuration_files-configuration_basename kobuki_localization.lua-load_state_filename $(arg load_state_filename)"output="screen">"echoes" to="/scan" />"cartographer_occupancy_grid_node" pkg="cartographer_ros"type="cartographer_occupancy_grid_node" args="-resolution 0.05" />"rviz" pkg="rviz" type="rviz" required="true"args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" />
kobuki_localization.lua 定位模式下的lua配置文件,只是在建图的基础上增加了两个配置参数
include "kobuki_robot.lua"TRAJECTORY_BUILDER.pure_localization = truePOSE_GRAPH.optimize_every_n_nodes = 20return options
定位&增量更新地图视频:
3D建图测试
1.3D数据集建图
使用3D激光雷达建图的时候我们必须要结合IMU,使用IMU提供的重力方向向量。这里我们直接根据官网[1] 的步骤进行运行,首先你需要去下载这个3D数据包[5]
其次我们需要将官网上的 “offline_backpack_3d.launch”替换为 “demo_backpack_3d.launch”,否则在保存地图的时候会出现无法调用
启动3D激光雷达建图
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=/media/crp/0E3C06880E3C0688/b3-2016-04-05-13-54-42.bag
等到数据运行完毕以后调用 write_state 服务来保存地图
rosservice call /write_state ~/3d_local.pbstream
将这个pbstream文件进一步转化成3D的ply点云文件
roslaunch cartographer_ros assets_writer_my_rslidar_3d.launch bag_filenames:=b3-2016-04-05-13-54-42.bag pose_graph_filename:=~/3d_local.pbstream
等待一段时间,处理完成后命令会自动退出,此时在bag文件旁边会生成一个.bag_points.ply后缀文件,这个就是点云文件[6].最后利用PCL自带的工具将ply文件转换成pcd文件
pcl_ply2pcd b3-2016-04-05-13-54-42.bag_points.ply test_3d.pcd
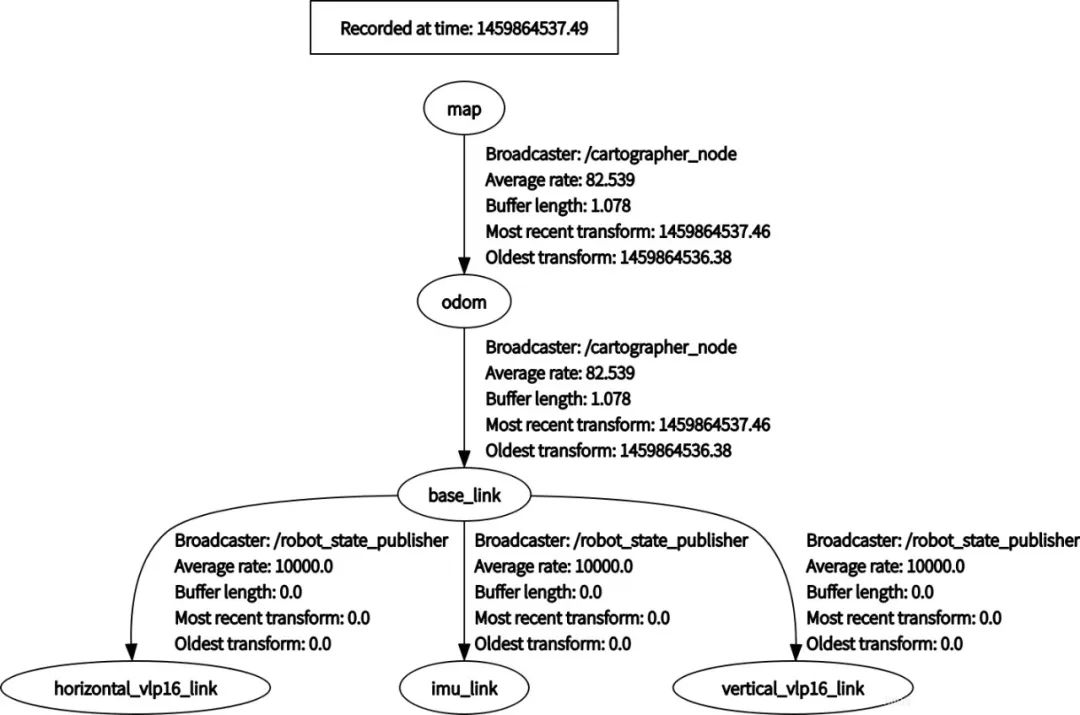
在运行的时候,机器人的位姿是发布在TF中的,如下图所示。因此我们可以通过读取odom->map之间的坐标变换来知道机器人的位置
2.3D定位
3D定位我们是利用在3.1部分生成的 “***~/3d_local.pbstream***”作为已有地图,将当前激光数据输入进行匹配,估计位置
cartographer_ros demo_backpack_3d_localization.launch load_state_filename:=/home/crp/3d_local.pbstream bag_filename:=/media/crp/0E3C06880E3C0688/b3-2016-04-05-15-52-20.bag
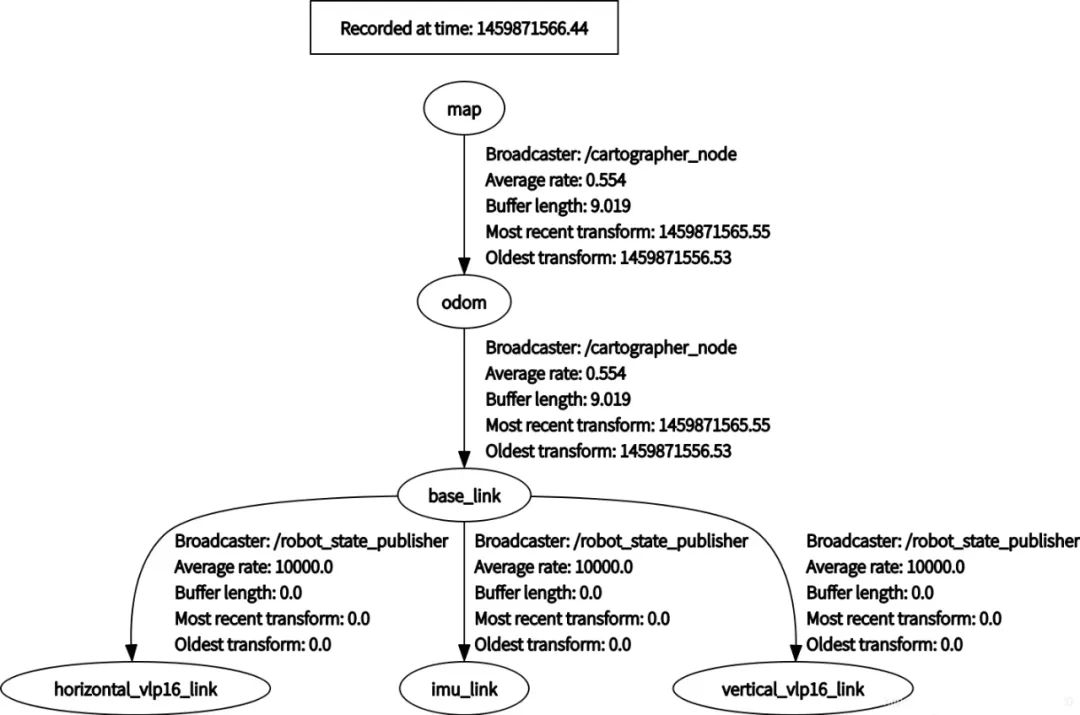
同样在运行定位的时候,机器人的位姿也是发布在TF中的,如下图所示。因此我们可以通过读取odom->map之间的坐标变换来知道机器人的位置。(可以明显看出,定位时候的位姿输出频率要远远低于建图时候的频率)
-
中国中车与中国能建签署战略合作框架协议2026-03-19 732
-
Python自动化测试框架及其应用2024-04-03 1668
-
API测试框架Grillon概述2023-09-08 2888
-
qiling框架和AFLplusplus安装2023-06-17 3818
-
一款扩展性高的渗透测试框架渗透测试框架2023-05-30 1465
-
什么是自动化测试框架2023-04-18 1854
-
Hypium框架使能ArkTS应用高效测试2023-03-11 2276
-
RT-Thread文档_utest 测试框架2023-02-22 930
-
Hypium的单元测试框架和UI测试框架2022-08-10 3710
-
Yaf框架的安装和HelloWorld2019-06-28 1001
-
SHARC音频模块:如何安装和配置裸机框架以便使用2019-06-27 3970
-
基于Web的自动化测试框架的研究2012-11-07 1185
全部0条评论

快来发表一下你的评论吧 !
