

KUKA机器人程序中铣削清零方式
描述
KUKA机器人程序中铣削清零方式:
;FOLD bin3 ( !F329 ) = 1 给BOSCH二进制数(1号钳).
;FOLD bin3 ( !F329 ) = 2 给BOSCH二进制数(2号钳).;%{SE}%MKUKATPVW %CVW_SPS %VARIASG %P 2:bin3 ( !F329 ) = 1, 3: ARIASG
;FOLD A786 = (!F329 & !F322 & !F830) + (F830 & A786) 计数器清数改为0
KUKA机器人对电极帽更换的清数方式:
;FOLD bin3 ( F64 ) = 1 1号焊钳对应的BOSCH;%{E}%MKUKATPVW %CVW_SPS %VARIASG %P 2:bin3 ( F64 ) = 1, 3: ARIASG
VW(#BINOUT,$FLAG[64],3,1)
;ENDFOLD
;FOLD bin3 ( F65 ) = 2 2号焊钳对应的BOSCH;%{E}%MKUKATPVW %CVW_SPS %VARIASG %P 2:bin3 ( F65 ) = 2, 3: ARIASG
VW(#BINOUT,$FLAG[65],3,2)
;ENDFOLD
;FOLD bin3 ( F66 ) = 3 3号焊钳对应的BOSCH;%{E}%MKUKATPVW %CVW_SPS %VARIASG %P 2:bin3 ( F66 ) = 3, 3: ARIASG
VW(#BINOUT,$FLAG[66],3,3)
;ENDFOLD
;FOLD bin3 ( F67 ) = 4 4号焊钳对应的BOSCH;%{E}%MKUKATPVW %CVW_SPS %VARIASG %P 2:bin3 ( F67 ) = 4, 3: ARIASG
VW(#BINOUT,$FLAG[67],3,4)
;ENDFOLD
;FOLD WARTE ( EIN ) ZEIT 2 [1/10Sek] ;%{E}%MKUKATPVW %CVW_SPS %VWTASG %P 2:WARTE ( EIN ) ZEIT 2 [1/10Sek], 3: WTASG
$LOOP_MSG[]="Wartezeit..."
$LOOP_CONT=TRUE
WAIT FOR (FALSE OR TIMER_LIMIT ((2)*0.1) OR (NOT $LOOP_CONT AND ($MODE_OP<>#EX)))
$LOOP_MSG[]=" "
;ENDFOLD
;FOLD A787 = EIN ;%{E}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A787 = EIN, 3: BOASG
$OUT[787] = TRUE
;ENDFOLD

8、实际点数:每个铣电极周期内焊接点数计数 。
9、最大点数:每个铣电极周期的最大焊点数。
10、预警点数:电极更换前预警点数发出预警信号。

11、实际修磨次数:实际修磨次数计数 。
12、最大修磨次数:电极最大修磨次数,倒数后需要更换电极。
13、铣电极请求:提前铣电极请求点数发出铣电极请求。
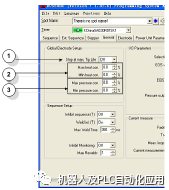
1、步进结束停止:当步进结束时是否停止焊接即是否允许调用焊接程序。-一般选择OFF,到数之后不停止焊接
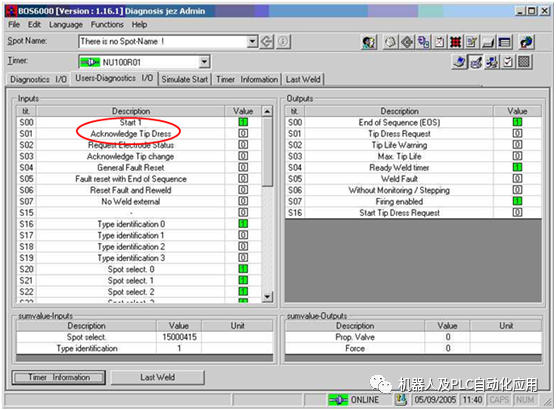
Acknowledge tip dress; 当控制器发出电极修磨请求, 当机器人进行电极修磨以后PLC发出的一个反馈信号.一个特别的焊接程序与电极修磨关联当修磨程序开启,磨损计数自动复位,电极修磨此数将会增加.
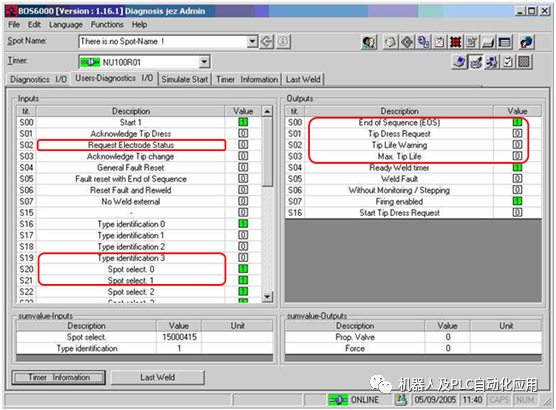
电极请求状态 (RES)
PLC 将会扫描输出端的电极修磨请求,电极寿命预警或者最大电极寿命当发现一个信号激活,一个反馈信号将被发送到控制器并且相关联的电极被复位.
当PLC设定RES信号置1, 通常是因为已经发出电极修磨请求或者电极寿命预警, PLC 必须要知道哪一个电极已经使得请求信号置1. 使得对正确电极的计数复位.
设定 RES 信号置1然后设定一个相关联的焊点选择置1, 例如. S20, 焊钳1, 在输出页面将会显示焊钳1的状态.
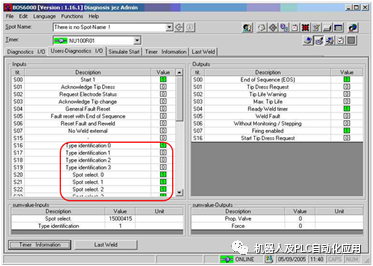
焊接压力在程序中设定,并且做好焊点号与程序号的关联. 一旦机器人输出焊点号至控制器,焊接压力竟会通过比例阀输出。
-
KUKA机器人铣削控制2023-05-31 2710
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1828
-
KUKA机器人程序中铣削清零方式介绍2022-12-26 1881
-
KUKA机器人伺服驱动模块维修2021-09-17 1887
-
库卡机器人MGV电源模块维修2021-09-08 1883
-
工业机器人组成结构相关资料分享2021-07-05 2743
-
KUKA机器人焊钳铣削清零方式2021-06-18 4399
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8022
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12405
-
关于KUKA机器人的STEP程序说明2020-06-12 4420
-
KUKA机器人问题解答2019-07-15 2627
-
工业机器人的末端关节旋转该精确控制?2018-11-01 4423
-
零基础玩转工业机器人2018-10-29 5038
-
KUKA重型机器人2015-02-03 8322
全部0条评论

快来发表一下你的评论吧 !
