

什么是握手协议?握手机制的原理
电子说
描述
。
什么是握手协议
说起握手,首先查了一下百度百科。握手是一种礼仪,起源于中世纪的欧洲,顺序为长幼有序,女士优先。(PS:所以握手的时候,男士记得要绅士一点哦)。
在芯片中,握手是最古老的跨时钟域之间传输数据的方式。握手机制通过将脉冲信号展宽,待输出一侧检测到信号并将其解析为脉冲信号后,再向输入一侧发送应答信号,表明接收到信号并且传输完成。
为什么要握手
在人类的进化史中,握手作为一种善意的表达方式,可以增进人与人之间的和谐。言归正传,那么数字电路中为什么也需要握手机制呢?这是因为在数字电路中,跨时钟域处理是个较为常见的问题。关于跨时钟域,我们公众号之前有介绍过,想复习一下的同学可以查看一下之前写的文章。
在从快时钟向慢时钟传递时,由于输入信号变化较快,输出一侧可能跟不上输入的变化,从而导致“漏采“现象。由于两个时钟之间的频率不同,来自快时钟域的脉冲信号,还没来得及被慢时钟的采到,便转瞬即逝,从而导致信号被漏采。此时,握手机制便可以大显神通。
握手机制的原理
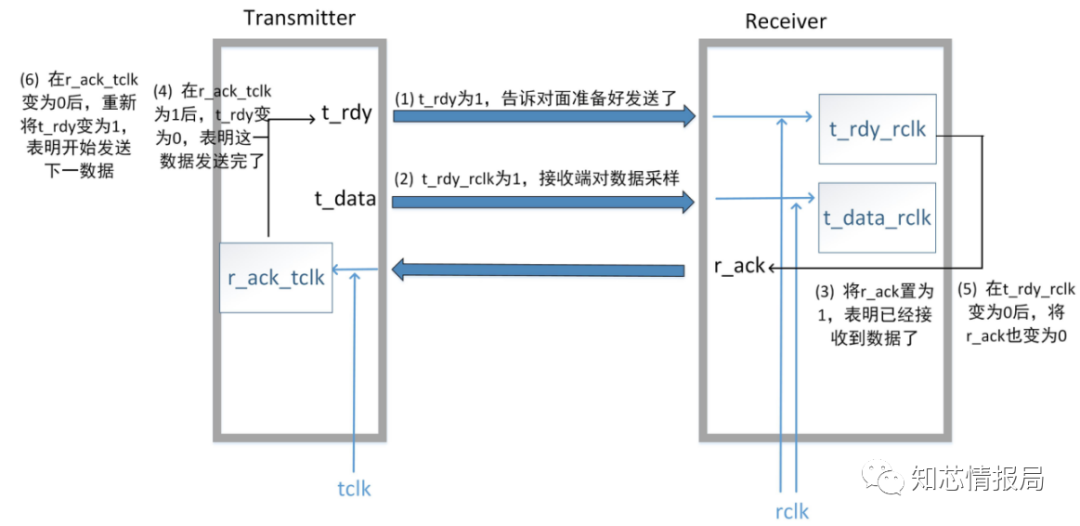
(1)发送端在t_clk时钟域下将需要发送的数据准备好后,将t_rdy信号置为有效,该信号必须在tclk下降沿输出。接收端在rclk时钟域下同步r_rdy信号,同步后的信号命名为t_rdy_rclk。
(2)接收端在t_rdy_rclk有效期间,对t_data进行采样,得到t_data_rclk。
(3)接收端将r_ack信号置为1,信号必须在rclk下降沿输出。发送端将r_ack同步为r_ack_tclk。
至此,已经完成“半握手”,发送端在输出下一数据前,不会等到r_ack_tclk被置为0。半握手机制工作速度快,但是使用不当有可能会导致操作错误。然而,如果要从高频时钟向低频时钟传输数据,则需要采用全握手机制。
(4)当r_ack_tclk为高电平时,发送端将t_rdy置为0。
(5)当t_rdy_rclk为低电平时,接收端将r_ack置为0。
(6)当r_ack_tclk为低电平时,发送端将t_rdy重新置为1发送端可以发送新的数据。
至此,全握手完成。显然,全握手过程耗时较长,数据传输较慢。但是全握手机制稳定可靠,可以在两个任意频率的时钟域中安全地进行数据传输。需要注意一点的是,数据应该在发送时钟域内稳定至少两个时钟上升沿,请求信号req的宽度应该超过两个时钟周期,否则从高速时钟向低速时钟传递可能无法捕捉到该信号,也就是信号“失联”了。
握手机制的代码实现
发送端状态机:
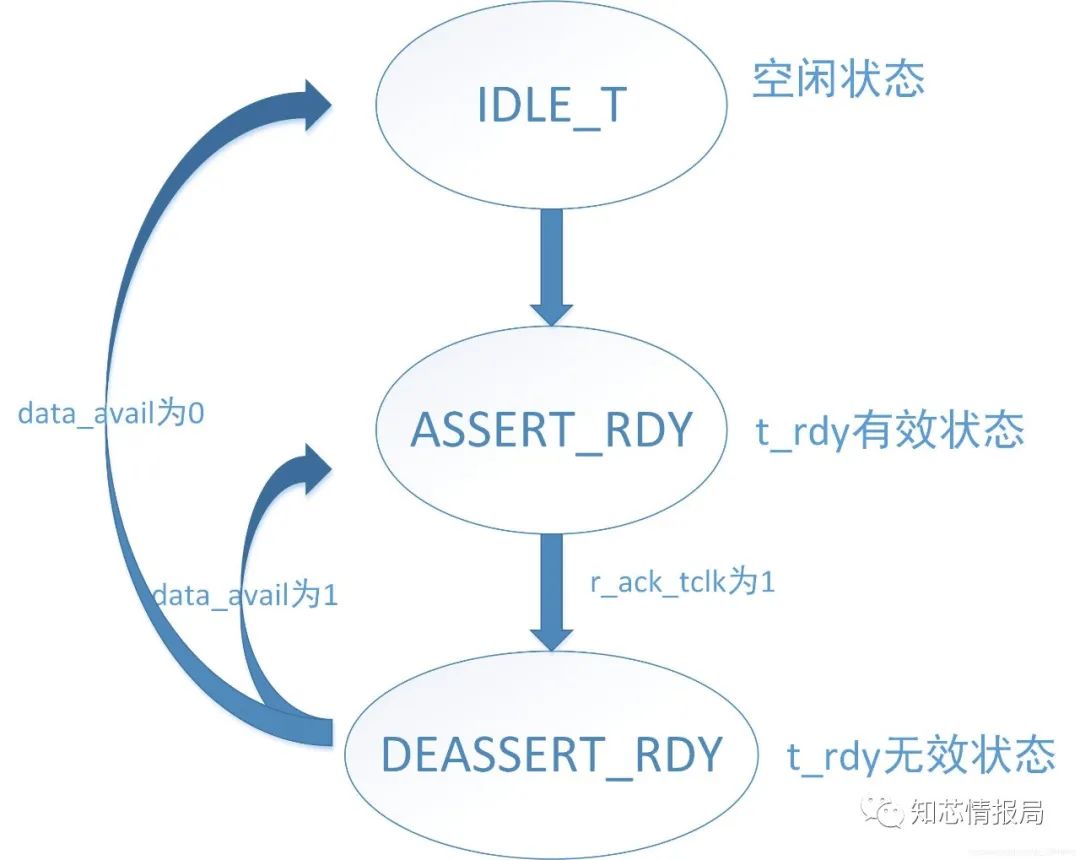
module transmit(tclk,reset_tclk,t_rdy,data_avail,transmit_data,t_data,r_ack);input tclk;input reset_tclk;input data_avail;input [31:0]transmit_data;input r_ack;output t_rdy;output t_data;localparam IDLE_T = 2'd0,ASSERT_T_RDY = 2'd1,DEASSERT_T_RDY = 2'd2;reg [1:0] t_hndshk_state,t_hndshk_state_nxt;reg t_rdy,t_rdy_nxt;reg [31:0] t_data,t_data_nxt;reg r_ack_tclk;always@(*)begint_hndshk_state_nxt = t_hndshk_state;t_rdy_nxt = 1'b0;t_data_nxt = t_data;case(t_hndshk_state)IDLE_T:beginif(data_avail) begint_rdy_nxt = 1'b1;t_hndshk_state_nxt = ASSERT_T_RDY;t_data_nxt = transmit_data;endendASSERT_T_RDY:beginif(r_ack_tclk)begint_rdy_nxt = 1'b0;t_hndshk_state_nxt = DEASSERT_T_RDY;t_data_nxt = 'd0;endelse begint_rdy_nxt = 1'b1;t_data_nxt = transmit_data;endendDEASSERT_T_RDY:beginif(!r_ack_tclk)beginif(data_avail)begint_rdy_nxt = 1'b1;t_hndshk_state_nxt = ASSERT_T_RDY;t_data_nxt = transmit_data;endelse begint_hndshk_state_nxt = IDLE_T;endendendendcaseendalways@(posedge tclk or negedge reset_tclk)beginif(!reset_tclk)begint_rdy <= 1'b0;t_hndshk_state <= IDLE_T;t_data <= 32'h00000000;r_ack_tclk <= 1'b0;endelse begint_rdy <= t_rdy_nxt;t_hndshk_state <= t_hndshk_state_nxt;t_data <= t_data_nxt;r_ack_tclk <= r_ack;endendendmodule
接收端状态机:
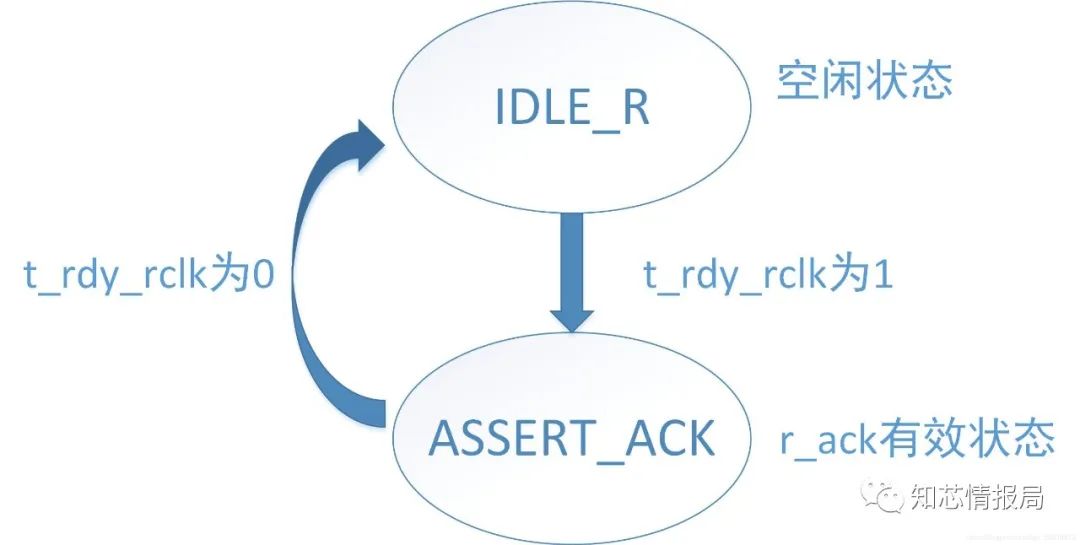
module receiver(rclk,reset_rclk,t_rdy,t_data,r_ack);input rclk,reset_rclk;input t_rdy;input[31:0] t_data;output r_ack;reg r_hndshk_state,r_hndshk_state_nxt;reg t_rdy_rclk;reg[31:0] t_data_rclk,t_data_rclk_nxt;reg r_ack,r_ack_nxt;localparam IDLE_R = 1'b0,ASSERT_ACK = 1'b1;always@(*)beginr_hndshk_state_nxt = r_hndshk_state;r_ack_nxt = 1'b0;t_data_rclk_nxt = t_data_rclk;case(r_hndshk_state)IDLE_R:beginif(t_rdy_rclk)beginr_hndshk_state_nxt = ASSERT_ACK;t_data_rclk_nxt = t_data;r_ack_nxt = 1'b1;endendASSERT_ACK:beginif(!t_rdy_rclk)beginr_hndshk_state_nxt = IDLE_R;r_ack_nxt = 1'b0;endelse beginr_ack_nxt = 1'b1;endendendcaseendalways@(posedge rclk or negedge reset_rclk)beginif(!reset_rclk)beginr_hndshk_state <= IDLE_R;t_data_rclk <= 1'b0;t_rdy_rclk <= 1'b0;r_ack <= 1'b0;endelse beginr_hndshk_state <= r_hndshk_state_nxt;t_data_rclk <= t_data_rclk_nxt;t_rdy_rclk <= t_rdy;r_ack <= r_ack_nxt;endendendmodule
握手机制的缺点
一个字:慢。
好了,希望本文对大家有所帮助。
审核编辑 :李倩
-
芯片设计之握手协议2025-05-14 1506
-
TCP三次握手协议的作用2025-01-03 1959
-
简述TCP协议的三次握手机制2024-08-16 3879
-
【芯片设计】握手协议的介绍与时序说明2023-12-11 5904
-
Valid-Ready握手协议的介绍与时序说明2023-12-04 2815
-
在握手协议中的Valid及data打拍技巧2023-06-27 3076
-
bq25792握手协议2023-06-11 3732
-
AXI4协议五个不同通道的握手机制2023-05-08 2389
-
介绍两种交互方法来完成Sequencer和Driver的握手机制2022-09-23 3496
-
请教大神 何为 数字握手?数字握手VI 有什么注意的2012-06-07 2919
-
什么是询问握手身份验证协议2010-04-03 2999
-
基于ECC带缓存的快速SSL握手协议2009-04-13 845
-
什么是握手信号? 什么是握手协议?2008-10-14 5943
全部0条评论

快来发表一下你的评论吧 !
