

基于YoloV5的ROS2封装
描述
大家好,我是秃头了依然在敲代码的小鱼。
最近小鱼又整了一个开源库,结合YOLOV5订阅图像数据和相机参数,直接给出一个可以给出识别物品的坐标信息,方便进行识别和抓取,目前适配完了2D相机,下一步准备适配3D相机。
开源地址:https://github.com/fishros/yolov5_ros2
YoloV5_ROS2
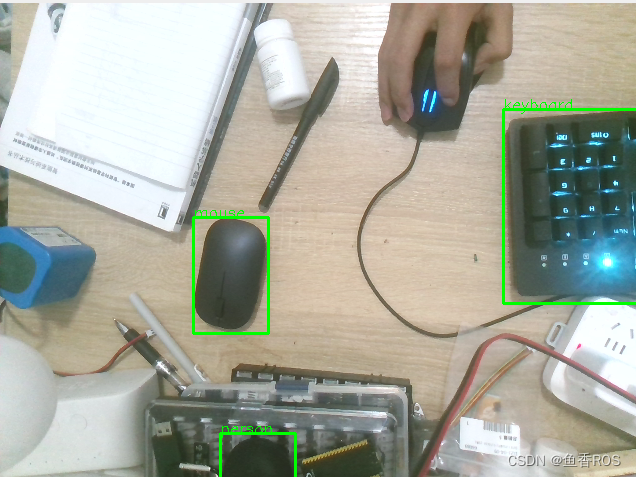
基于YoloV5的ROS2封装,给定模型文件和相机参数可以直接发布三维空间位置进行抓取操作。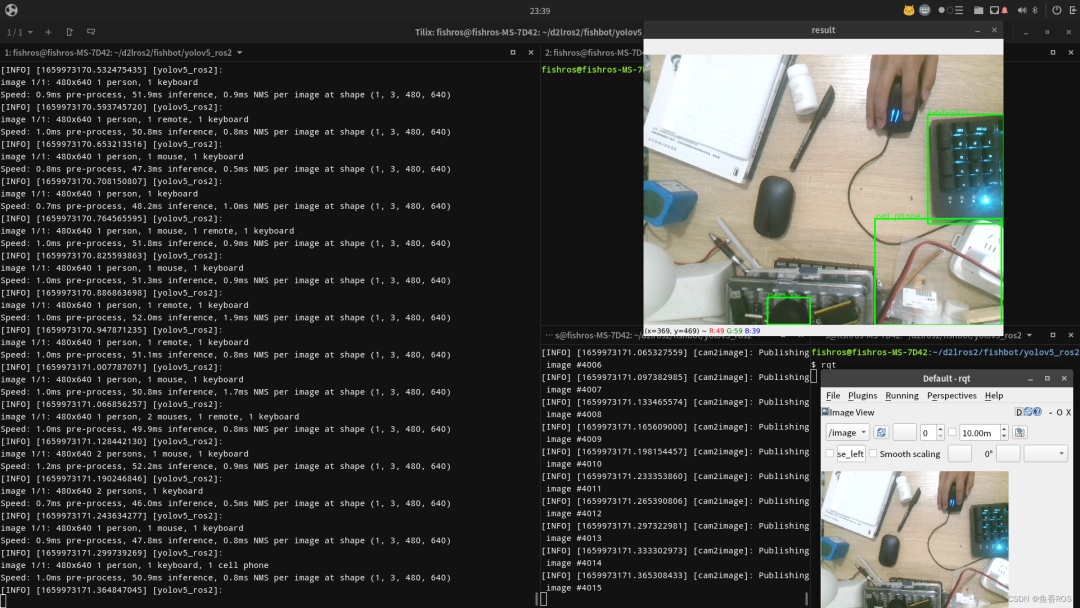
1.安装依赖
sudo apt update
sudo apt install python3-pip ros-humble-vision-msgs
pip3 install -i https://pypi.tuna.tsinghua.edu.cn/simple yolov5
2.编译运行
colcon build
source install/setup.bash
ros2 run yolov5_ros2 yolo_detect_2d --ros-args -p device:=cpu -p image_topic:=/image
使用真实相机,修改默认话题image_topic:=/image
ros2 run image_tools cam2image --ros-args -p width:=640 -p height:=480 -p frequency:=30.0 -p device_id:=-1
3.订阅结果
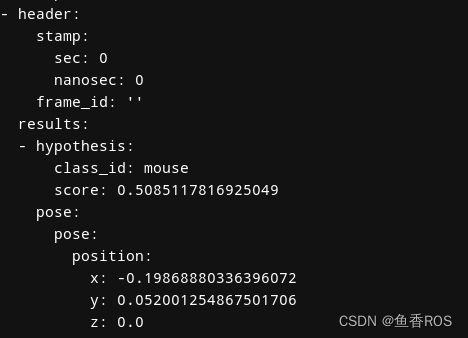
识别结果通过/yolo_resutl话题发布出去,包含原始的像素坐标、和归一化后的x和y坐标(相机坐标系下)。
ros2 topic echo /yolo_result
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?2024-03-01 5847
-
ROS2的安装与使用 精选资料推荐2021-08-30 1268
-
龙哥手把手教你学视觉-深度学习YOLOV5篇2021-09-03 8028
-
如何在ROS2中运行小乌龟呢2021-11-05 2450
-
研讨会预告 | NVIDIA Isaac加速ROS中的YOLOv5和自定义AI模型2022-11-25 1643
-
【YOLOv5】LabVIEW+YOLOv5快速实现实时物体识别(Object Detection)含源码2023-03-13 3589
-
使用旭日X3派的BPU部署Yolov52023-04-26 2078
-
Yolov5算法解读2023-05-17 14449
-
【YOLOv5】LabVIEW+TensorRT的yolov5部署实战(含源码)2023-08-21 2396
-
yolov5和YOLOX正负样本分配策略2023-08-14 4756
-
ROS2中自带例程测试2023-11-28 2382
-
在TogetherROS中如何安装ROS2功能包2023-12-01 2964
-
ros2教程2025-05-23 381
-
yolov5训练部署全链路教程2025-07-25 2205
-
瑞芯微(EASY EAI)RV1126B yolov5训练部署教程2026-05-09 551
全部0条评论

快来发表一下你的评论吧 !
