

线扫相机的原理
电子说
描述
线扫相机的原理:线扫相机一般一次只拍摄一条线(线宽通常是1个像素),在机构运动的过程中,线扫相机不断地拍摄线,于是“聚线成面”,这就是线扫相机成像的原理。
线扫相机的原理决定了,它所拍摄的物体必须要运动。机构运动的话,就存在机构的速度是否和线扫相机采集的速度匹配的问题。
将对机构运动速度的要求进行拆分的话,其实就是如下两点:
① 运动速度必须与线扫相机的工作行频(即采集速度)相匹配。
② 机构的运动速度最好是匀速,或者十分接近匀速。
如果机构速度过快,最后的图像在运动方向上被压缩;如果机构速度过慢,最后的图像在运动方向上被拉伸。
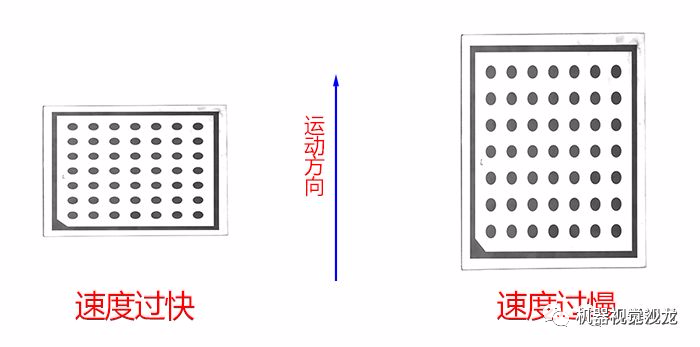
判断机构速度是偏快还是偏慢,并不困难,困难的是定量分析,要有数据作为判断的标准。
方案步骤说明:
① 先使用标定板标定,得出与相机行频匹配的机构运行速度,并调节至此速度。
② 将标定板放置在运动的机构上,采集标定板的图像,需注意的是,标定板需要大致摆正。
③ 将采集到的标定板图像做初步处理,例如裁掉多余的部分以便于后续处理。(这一步不是必须的)
④ 通过算法得到标定板中所有圆的最小外接平行矩形的高,计算这张图中所有圆对应的“高”的标准差。
⑤ 为了减少误差,可以对多张标定板图像执行以上算法,观察得到的所有标准差数据。标准差越小,说明机构运动速度越稳定。
Halcon程序如下:
*载入当前目录下的全部图片
list_files ('', ['files','follow_links'], ImageFiles)
tuple_regexp_select (ImageFiles, ['\.(tif|tiff|gif|bmp|jpg|jpeg|jp2|png|pcx|pgm|ppm|pbm|xwd|ima|hobj)$','ignore_case'], ImageFiles)
for Index :=0 to |ImageFiles| - 1 by 1
dev_clear_window ()
read_image (Image, ImageFiles[Index])
threshold (Image, Region, 0, 210)
fill_up_shape (Region, Region, 'area', 1, 100)
opening_circle (Region, RegionOpening, 5.5)
connection (RegionOpening, ConnectedRegions)
select_shape (ConnectedRegions, SelectedRegions, 'roundness', 'and', 0.9, 1)
select_shape (SelectedRegions, SelectedRegions1, 'area', 'and', 10550, 19999)
smallest_rectangle1 (SelectedRegions1, Row1, Column1, Row2, Column2)
gen_rectangle1 (Rectangle, Row1, Column1, Row2, Column2)
inner_circle (SelectedRegions1, Row, Column, Radius)
dev_display (Image)
dev_set_draw ('margin')
dev_display (Rectangle)
hight := []
for Index := 0 to |Row1| -1 by 1
*设置字体和字号
set_font (3600, '-Courier New-10-')
*显示每个圆的最小外接矩形的高和宽
disp_message (3600,((Row2[Index] - Row1[Index]) + ' '+ (Column2[Index] - Column1[Index])) , 'image', Row1[Index] - 70, Column1[Index], 'black', 'true')
tuple_concat (hight, Row2[Index] - Row1[Index], hight)
endfor
if (|hight| > 1)
*求元组中所有元素的标准差
tuple_deviation (hight, Deviation)
set_font (3600, '-Courier New-20-')
disp_message (3600, '纵向高度标准差:' + Deviation + ' ' + |hight| + '个圆' , 'image', 50, 50, 'black', 'true')
endif
stop()
endfor
处理结果:
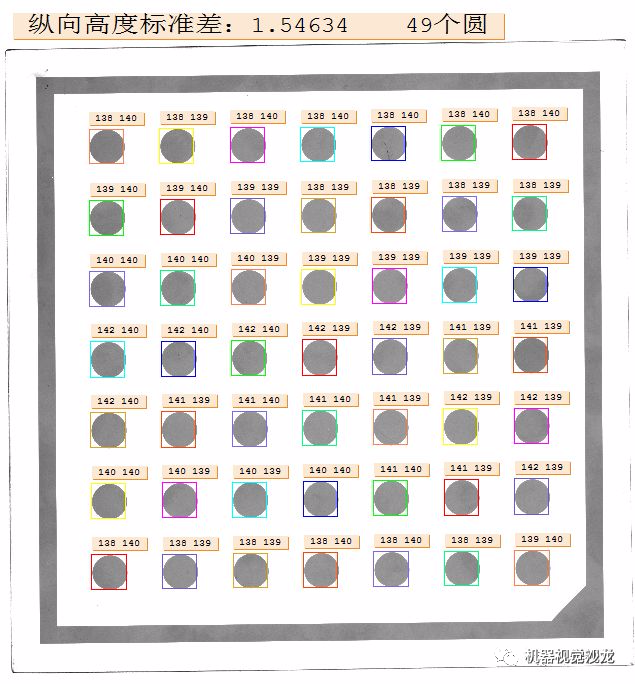
由于没有对比,因此标准差 = 1.54634暂不能知道机构的速度稳定性是高还是低,但是如果有两台类似的机构,要评判它们的速度稳定性的好坏, 那么这种方法可以轻松做出正确判断。
审核编辑 :李倩
-
线扫相机的行频与曝光时间有何关系2024-02-27 10290
-
使用AD80066做线扫相机的数据采集,实验发现其输出精度非常低是怎么回事?2023-12-18 513
-
线扫相机速度和行频的关系2023-12-15 7896
-
线扫相机工作原理是什么2023-12-13 8475
-
汇川PLC和线扫相机通讯异常的处理思路YS YYDS 2023-06-25
-
如何判断线扫相机项目中定量判断机构运动是否匀速呢2023-01-30 2139
-
线扫相机的原理和判断方法2023-01-17 8465
-
线扫相机在机器视觉中连续物体的检测解决方案2022-11-18 3464
-
机器视觉:面阵相机和线扫相机2022-11-02 8244
-
一种简化的线扫相机单维度标定法2022-01-26 672
-
线扫相机在计算物距时,需要把接圈的长度加到焦距上吗2020-04-24 2755
-
线扫相机拍照有光晕,如下图,求助这是如何形成的,该怎么调节相机和光源,2019-09-25 3848
-
传统CCD线扫相机与宽幅线扫相机2018-05-26 4714
全部0条评论

快来发表一下你的评论吧 !
