

基于C2000的实时数字电机控制方法
工业控制
描述
作者:Bilal Akin, Chris Clearman
对在您的下一个应用中使用哪种类型的电机感到困惑?本文解释了每种电机的优缺点,如何控制它们,以及它们在哪些应用中最有意义。
随着微控制器 (MCU) 的革命,电机控制已远远超出使用简单换向控制的普通通用电机。今天,有各种各样的低成本 MCU 可供使用,使开发人员能够以具有成本效益的方式创建高性能系统。具体来说,通过使用更复杂的控制算法,系统可以提供更好的加速度、更准确的速度/位置控制、更高的扭矩、更好的功率效率和更高的精度,同时通过将功能集成到硬件和软件中来显着降低系统成本。
考虑到不同的电机类型和不同的控制技术,从众多可用选项中进行选择可能会令人困惑。为了在管理成本的同时最大限度地提高性能和效率,开发人员需要有广泛的控制器选择,以便为他们的应用程序选择最佳架构,但这也意味着开发人员需要轻松了解每种配置的优缺点。
TI 通过提供 TMS320C2000™ MCU 平台为开发人员简化了这一过程,该平台提供了最广泛的器件之一,涵盖几乎所有价位并支持几乎所有类型的电机和控制技术。使用 C2000 MCU,开发人员可以以具有成本效益的方式实现更高的效率和更高的性能。此外,由于这些 MCU 在整个平台上代码兼容,因此开发人员可以利用长期代码投资和跨电机控制设计的重用来实现显着的成本节约和应用稳定性。
高性能电机
通用、有刷直流和步进电机由于成本低且控制简单而构成了大多数电机应用。然而,对于各种各样的应用,通过更复杂的控制机制提高性能和效率会带来足够的价值来证明任何增加的设计和组件成本是合理的。例如,开发需要精确变速速度或位置控制、更高功率效率和更长电机寿命的应用的设计人员将需要考虑更复杂、更智能的电机控制类型,包括三相交流感应 (ACI)、无刷直流(BLDC) 和永磁同步电机 (PMSM)。
ACI 是最坚固的电机类型之一,非常适合各种高性能应用,包括白色家电、泵、风扇和压缩机(用于冰箱和 HVAC 系统)。在 ACI 电机中,内部定子的磁通量通过改变电流来控制,这反过来又会感应出转子磁通量(ACI 电机不包含磁铁)。
转矩由转子和定子磁通之间的角度决定。ACI 是一种异步电机,因为内部转子和定子磁场矢量以不同的速度旋转。ACI 提供出色的速度和扭矩控制,其主要优势是在高速运行时成本低、效率高。ACI 的主要缺点是需要复杂的反馈和控制机制来保持高效率,特别是在变速和低速时。
相比之下,BLDC 和 PMSM 是同步电机。定子磁通通过改变电流来控制,但转子磁通由永磁体或电流馈电线圈保持恒定。转子和定子磁通之间的角度仍然决定了产生的扭矩量,并且转子旋转的频率与定子磁场相同。对于同步电机,应测量或估计转子位置,以实现同步和高性能控制。因此,同步电机可用于高精度控制位置。
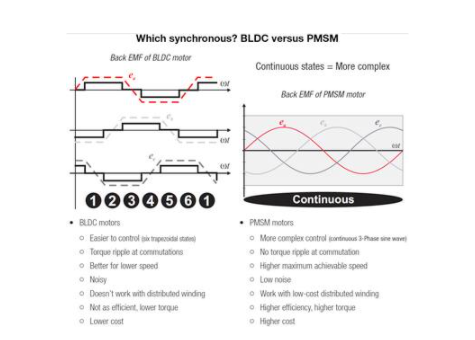
图 1:使用更多状态来控制位置可提高定位精度和算法复杂度。
BLDC 和 PMSM 用于控制位置的状态数量不同。例如,与正弦 PMSM 的“连续”状态相比,梯形 BLDC 电机有六个状态(参见图 1)。支持的状态越多,可以控制的位置就越精确。然而,更多的状态也需要更复杂的控制机制和处理。
BLDC 提供高效、可靠的运行、中高扭矩,可用于可燃环境中的自动化、牵引、精密和白色家电等应用。这些类型的电机的一个关键优势是它们没有电刷,消除了磨损、维护和 EMI 的主要来源。此外,它们使用磁铁,从而使它们具有更高的功率密度和更高的效率。
技术进步继续将 BLDC 技术带入更广泛的低成本应用,这些应用传统上由标准直流有刷电机提供服务,使其成为增长最快的电机类型之一。虽然 BLDC 比标准直流有刷电机相对昂贵,但 BLDC 在低磨损和维护在总体总拥有成本中起主要作用的应用中具有吸引力。BLDC 还在需要低速或变速运行的应用中取代 ACI,例如 HVAC 系统中的鼓风机电机,可以调整其速度以更高效地运行。
除了在变速下提供比 ACI 更好的性能外,BLDC 电机在同等成本下体积更小、效率更高。通过换向驱动 BLDC 电机相当简单,从而节省了电机设计、电子控制和更轻的整体重量。由于磁体中的固有磁通,驱动电机所需的电流更少,从而提高了 BLDC 电机的效率。
虽然 BLDC 电机历来用于许多位置控制应用,但 PMSM 用于需要精确位置控制、超高速和/或高扭矩的应用。常见应用包括牵引力控制、精密自动化(机器人)和混合动力/电动汽车。PMSM 提供更高的效率和扭矩,在换向时具有最小的扭矩波动,提供更高的最大可实现速度,与低成本的分布式绕组一起工作,并且噪音低。由于 PMSM 基于连续正弦控制,因此在运行期间观察到的噪音较小,从而能够更快地对负载变化做出反应,并准确地达到所需的扭矩、速度和位置。
控制方法
对于 ACI 电机,简单的标量控制(也称为 V/f 或 Volts per Hertz)很受欢迎,因为与简单控制技术相关的电子成本较低。标量控制通过简单地增加或减少用于驱动电机的正弦波的频率来调整电机速度,而不考虑电流或转矩优化的控制。标量控制往往具有较差的动态性能,电机对变化的反应缓慢以及超过设定点。此外,扭矩传递在低速和高速时效率低下。此外,在低速时,内部损耗会导致大部分能量被浪费。如果采用更复杂的控制方法,在性能和效率方面还有很大的改进空间。
磁场定向控制 (FOC),也称为矢量控制,可用于 ACI 和 PMSM 电机,并在整个扭矩和速度范围内提供最佳控制(见表 1)。这允许在任何速度下实现最大扭矩,从而比标量控制具有更高的效率。启动扭矩也增加了,同时扭矩波动最小化。FOC 对设定点或负载变化的响应更快,满载时的最低速度基本为零,从而在电机的整个速度范围内实现良好的性能。因为 FOC 是电流控制的,所以可以优化功率逆变器电路。所有这些因素都降低了成本,使开发人员能够根据手头的任务调整电机尺寸。权衡是实施 FOC 更加复杂,
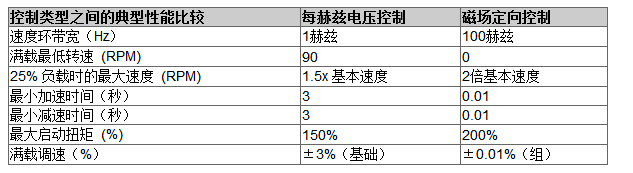
表 1:FOC 提供对整个扭矩和速度范围的完全控制,同时更快地响应设定点的变化或负载变化。
有几种常见的方法可以创建用于测量角度和速度的反馈回路。通常,这些测量可以使用传感器进行或无传感器进行。传感器增加了系统的成本和组件,但在高精度系统中通常是必需的。或者,无传感器实现需要软件和处理资源来对电机进行建模,同时使用实时电流和电压测量来估计角度和速度。一旦测量或估计了角度和速度,就可以调节反馈回路以控制速度、位置/角度、电流、磁通和扭矩。
使用 ACI 电机时,开发人员可以使用转速计进行直接测量,该转速计产生与速度成正比的方波输出。对于 PMSM 电机,开发人员可以使用编码器或旋转变压器来跟踪位置并通过测量位置随时间的变化来计算速度。两者的无传感器方法使用直流母线电压和两个三相电流通过数学变换和计算来确定相角,并通过使用滑动模式、MRAS 等状态观察器对特定 ACI 和 PMSM 电机进行建模来估计速度和磁通量, 等等。
对于 BLDC,开发人员可以选择梯形和正弦控制方法。由于成本更低、控制器更简单,梯形控制传统上是更常用的方法。然而,正弦控制提供更平稳的操作,具有更好的扭矩响应和更低的电噪声。降低电气噪声很重要,因为电磁干扰 (EMI) 会影响电机电路和输入系统的不稳定性,从而显着降低性能并增加侵入性可听噪声。
梯形控制在换向时也有转矩脉动,在高速时更难控制,并且不适用于分布式绕组。沿 C2000™ 平台的持续集成和降价缩小了使用更高性能 MCU 的成本壁垒,使得在 OEM 需要通过更精确的控制和/或更好的效率来实现差异化的应用中实施正弦控制成为可能。
无论是梯形控制还是正弦控制,都需要一个反馈回路来控制位置、速度以及出于转矩原因的电流。速度和位置既可以用传感器测量,也可以通过监测三相的反电动势电压来计算状态或转数(位置)的顺序,然后速度就是位置随时间变化的速率。 虽然有许多不同的方法来测量电流,但出于成本和可靠性的原因,最流行的方法是使用单个直流分流器。
C2000 MCU 满足各种电机控制设计要求
TI 的策略是提供 C2000 MCU 作为通用平台,以通过各种控制技术控制所有电机类型。C2000 提供从低于 2 美元到 300 MHz 浮点 Delfino™ 系列的 Piccolo™ 系列,适用于各种电机应用。此外,通过提供通用硬件和开发平台,开发人员可以无限制地扩展设计,实现从简单电机应用到高端、高精度应用的软件重用。
C2000 器件在 MCU 架构内提供 DSP 功能,提供 40 至 300 MHz 的性能,辅以一系列基于硬件的功能来加速代码执行,包括内置 DSP 功能、单周期 32x32 位 MAC 和 8-级保护流水线以实现最高时钟速度。可选的 CPU 功能包括用于提高精度的浮点单元或用于并行处理和卸载整个闭环 FOC 系统的控制律加速器。尽管经过优化以快速执行基于数学的 32 位运算,但 C2000 架构还可以高效处理通用代码,使单个 C2000 MCU 能够管理整个电机控制系统。
C2000 MCU 针对实时控制应用进行了微调,提供灵活的中断系统,具有快速响应和内置于芯片中的非侵入式实时调试功能。电机控制系统特有的挑战之一是它们必须在运行时进行调试。在断点处停止 MCU 会导致 MCU 也中断反馈回路并停止驱动电机。虽然开发人员可以实现调试监视器以与主要电机控制应用程序并行执行,但通常此类代码在产品发货时会被删除。因此,开发人员无法在现场调试系统。
C2000 MCU 通过集成实时数据交换 (RTDX™) 电路简化实时调试,使开发人员可以直接访问内部 MCU 资源。具体来说,开发人员可以暂停非关键代码并访问内存和寄存器,同时继续处理实时中断。由于 RTDX 在硅片中实现,因此不需要 CPU 周期,从而提供对系统的完全非侵入式可见性。此外,RTDX 功能始终可用,允许对客户退货或仍在现场的系统进行调试。
C2000 平台还为开发人员提供全面的控制型外设选择,包括一流的 ADC 性能和精度、具有灵活可配置性的多个高分辨率 PWM、集成传感器接口以及所有重要的工业接口,包括 CAN 、LIN、SPI、I²C 和 UART。这些将在本文后面更详细地讨论。
C2000 Piccolo MCU 系列
C2000 Piccolo MCU 系列为成本敏感型应用带来实时控制。Piccolo MCU 在 C2000 平台上与代码兼容,并提供针对控制应用优化的智能外设,具有更高的片上模拟集成度,包括:
混合 ADC 允许灵活启动转换和高达 5 MSPS 的连续采样。
具有高达 150 ps 的频率和占空比调制的高分辨率 PWM。
具有 POR/BOR 的片上电压监控器消除了外部监控器,并具有消除所有 PWM 引脚上的启动毛刺的内置功能。
IEC-60730 的三层时钟保护。
两个内部和可选的外部振荡器。
两个看门狗和时钟故障检测电路自动切换到备用 OSC。
如果两个内部故障设备自动进入跛行模式并正常关机。
GPIO 包括内部数字滤波器,可降低噪声并节省外部系统成本。
C2000 Delfino MCU 系列
C2000 Delfino MCU 系列为实时控制应用带来浮点处理。Delfino MCU 在 C2000 平台上代码兼容,并提供针对具有最高性能处理引擎的控制应用进行优化的智能外设:
32 位单精度浮点,吞吐量为 200 到 600 MFLOPS。
- 通过 IQMath 与定点设备的单一代码兼容源。
- 可选的片上双采样和保持 12 位 ADC,速度高达 12.5 MSPS。
- 具有高达 55 ps 的频率和占空比调制的高分辨率 PWM。
- 片上可重新编程闪存或高达半兆字节的片上 RAM。
- 多达 24 个 PWM 输出、88 个 GPIO,采用多达 256 针封装。
- DMA、外部存储器接口、双 CAN 和多个串行接口。
通过 controlSUITE™ DMC 系统简化设计
用于 C2000 MCU 的 controlSUITE 是一个内聚的软件套件,旨在最大限度地缩短开发时间。它包括用于构建技术示例和系统框架的设备驱动程序、API、实用程序和库,这些示例和系统框架使用 TI 的专业调试工具在开源硬件上进行演示。controlSUITE 的一个关键组件是数字电机控制 (DMC) 库和生成的系统示例。
DMC 库由表示为块的函数组成。这些模块分为变换和估计器(Clarke、Park、滑动模式观察器、相电压计算和旋转变压器、通量和速度计算器和估计器)、控制(信号生成、PID、BEMF 换向、空间矢量生成)和外设驱动器(用于多种拓扑和技术的 PWM 抽象、ADC 驱动器和电机传感器接口)。每个块都是具有可变输入和输出的模块化软件宏,并与源代码、使用和技术理论单独记录。
TI 随后使用 DMC 库构建了完整的系统示例。在初始化时,定义了所有 DMC 库变量,并将一个模块的输出设置为下一个模块的输入。在运行时按顺序调用宏函数。每个系统都是使用我们的增量构建方法构建的,该方法允许构建增量代码部分,以便开发人员可以一次验证其应用程序的每个部分。这对于具有许多可能影响系统的不同变量以及跨电机参数的许多独特挑战的实时控制应用来说至关重要。
例如(参见图 2),在无传感器 PMSM FOC 系统中,软件中内置了以下增量构建。图 2 显示了双无传感器 FOC PMSM 系统增量构建的第一步。此时,开发人员可以验证与目标无关的模块、占空比和 PWM 更新。电机在此级别断开,以防止在验证 PWM 之前意外烧毁电机。构建级别 1:使用虚拟信号,验证 Inverse Park、Space Vector 和 PWM 驱动器是否产生正确的波形。第 2 级:验证 ADC 转换、相电压计算、克拉克和帕克变换。级别 3:闭环 PID 电流控制验证。第 4 级:滑动模式观察者和速度估计器验证。等级 5:闭环 PID 速度控制。
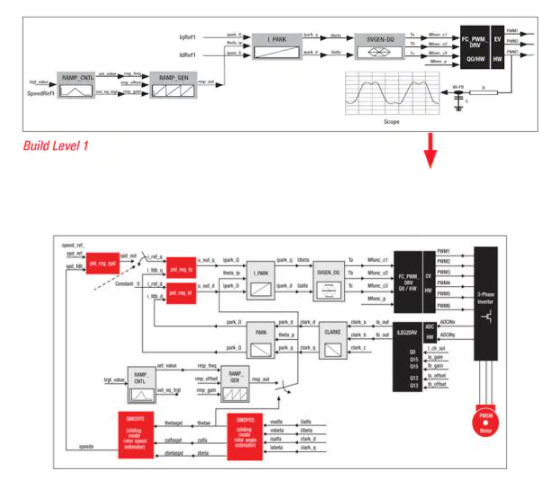
图 2:构建级别 1:使用虚拟信号验证波形;构建级别 5:闭环 PID 速度控制。
系统在可用的硬件平台上进行验证。DMC 硬件平台均使用由模块化 controlCARD 控制的基础功率级构建。controlCARD 是一种基于 DIMM 占用空间的标准化卡,允许您将不同版本的 C2000 设备插入不同的主板。最新的 DMC 硬件平台包括支持 FOC (PMSM) 和正弦 (BLDC) 的低压 (36 V) 双轴数字功率因数校正以及高压 (350 V) 单轴数字电源支持 FOC(ACI、PMSM)和正弦或梯形(BLDC)的因子校正。所有系统都包括用于调试的电气隔离 JTAG,并附带启动 GUI、Code Composer Studio™ 集成开发环境的免费副本、完整的工作增量构建软件、分步用户指南、记录控制理论、屏幕截图、硬件连接和调试技巧。所有硬件都是开源的,可供开发人员插入到他们的设计中,包括 Gerber 文件、原理图和 BOM。TI 还通过其强大的 IQMath 库简化了复杂的算法设计,该库允许您通过选择二进制表示数字的哪些位是整数 (I) 以及哪些位是商 (Q) 来选择数值范围和分辨率。使用定点 MCU 时,开发人员负责管理小数点。有时,可能需要移动小数点以调整范围。例如,如果范围太小,数字可能会饱和(即,10 可能看起来与 10,000 相同)。同样,如果范围太大,分辨率的步长也会太大,精度会下降。通过抽象小数点的管理并允许使用浮点约定编写代码,开发人员可以随时更改比例和分辨率,从而使编写复杂的算法代码变得更加容易,因为库负责其余的工作。通过简化将代码从一个系统/MCU 移动到另一个系统/MCU 的迁移过程,即使从定点 MCU 迁移到浮点 MCU,这也有助于代码重用以及“上下代码移动性”。开发人员还可以调整(迁移后重新调整)系统以获得最佳分辨率和动态范围,消除饱和和量化效应。此外,大多数 DMC 库模块都是基于 IQMath 的,允许每个模块针对特定应用进行调整。开发人员可以随时更改比例和分辨率,从而使编写复杂的算法代码变得更加容易,因为库负责其余的工作。通过简化将代码从一个系统/MCU 移动到另一个系统/MCU 的迁移过程,即使从定点 MCU 迁移到浮点 MCU,这也有助于代码重用以及“上下代码移动性”。开发人员还可以调整(迁移后重新调整)系统以获得最佳分辨率和动态范围,消除饱和和量化效应。此外,大多数 DMC 库模块都是基于 IQMath 的,允许每个模块针对特定应用进行调整。开发人员可以随时更改比例和分辨率,从而使编写复杂的算法代码变得更加容易,因为库负责其余的工作。通过简化将代码从一个系统/MCU 移动到另一个系统/MCU 的迁移过程,即使从定点 MCU 移动到浮点 MCU,这也有助于代码重用以及“上下代码移动性”。开发人员还可以调整(迁移后重新调整)系统以获得最佳分辨率和动态范围,消除饱和和量化效应。此外,大多数 DMC 库模块都是基于 IQMath 的,允许每个模块针对特定应用进行调整。
TI 还与其第三方广泛合作,以允许开发人员进一步抽象其电机控制设计。借助 MathWorks 的 Embedded Target 和 Visual Solutions 的 VisSim 等仿真、图形开发和代码生成工具,开发人员可以更直观地创建电机控制系统,然后让该工具在 C2000 DMC 上生成、下载和运行代码硬件套件。
高级功能的扩展处理能力
要实现更复杂的算法以提高电机控制应用的效率和性能,MCU 需要能够执行复杂的数学运算。通过加速数学计算,C2000 器件不仅可以实现更精确的电机控制,还可以快速执行这些计算,从而为其他功能留下大量处理空间。开发人员可以通过多种方式利用这一增加的空间,从而加快上市时间并降低系统成本。例如,不必创建几乎没有可重用性的流线型系统,余量允许开发人员通过采用模块化方法来简化设计,该方法允许将代码转移到其他电机控制应用程序中。
净空还使开发人员能够引入功率因数校正 (PFC) 等高级功能。PFC 提高了电源效率并防止了因谐波电流引起的失真而导致的损失。PFC 已在许多地区强制使用,并已成为大多数电源设计的组成部分。它通常使用专用的 PFC 芯片或辅助 MCU 来实现,但使用 C2000 平台,PFC 可以直接集成到主 MCU 上,从而节省电路板空间和成本。广泛的 C2000 器件使开发人员能够选择具有最佳容量的 MCU,以在单个芯片上实施具有 PFC 和运动分析的整个运动控制系统。
增强的外设集成以简化设计并降低系统成本
C2000 外设的广泛组合将关键功能集成到系统中,通过消除对外部组件的需求,显着节省成本并减小电路板尺寸。这些外设中的许多还提高了系统精度和性能,同时减轻了主 CPU 的负载,从而可以腾出时间来执行更高级的电机控制处理。一些更重要的 C2000 外设包括:
高分辨率和同步 ADC:在实施高性能电机控制技术时,最关键的考虑因素之一是系统准确读取电机电流的能力。无传感器系统的精度直接取决于精确的电流测量,甚至基于传感器的系统也可能需要测量电流来控制扭矩。
准确的电流测量不仅需要准确的读数(即分辨率),而且读数是在特定时间完成的。高级控制技术通常有一个短窗口,必须在其中获取反馈样本。因此,精确时序有两个部分:ADC 必须与 PWM 事件紧密同步,并且必须快速采集样本。采样延迟可能来自上下文切换以及 ADC 延迟和中断延迟。为了提供可能的最佳精度,C2000 器件提供了一系列高分辨率 ADC 以满足应用要求。此外,TI 的 Piccolo 系列支持即时(早期)中断,以将可用的 ADC 结果与 CPU 获取同步,从而进一步提高系统精度。所有 C2000 器件都包括一个 12 位、双采样和保持、高速架构(最多 12 个。
功能丰富、基于硬件的 PWM:鉴于脉冲宽度调制器 (PWM) 在电机控制应用中发挥的重要作用,TI 设计了基于硬件的 PWM 模块,该模块具有针对性能和效率进行了优化的各种增强功能。C2000 器件具有 4 到 9 个 PWM 模块,每个模块具有两个 PWM 输出,使开发人员能够支持广泛的开关拓扑。每个模块都有自己的 16 位影子定时器,可以独立运行、同步运行或相位延迟,以实现最大的灵活性。定时器可以在向上、向下或向上向下模式下运行到编程的周期。通过在事件(零、周期和两个/四个可编程比较值)处采取行动(PWM 高、低、切换、无)来生成波形。这提供了完整的波形生成灵活性。
与功率级切换同步是电机控制设计中的一个重要特性,尤其是希望在 PWM 不切换期间对电流进行采样,以便您可以从系统中获得准确的读数并避免系统噪声。来自 PWM 时基的每个事件都可用作 CPU 中断或向 ADC 发送转换开始信号,从而实现事件同步的最大灵活性。
所有 C2000 MCU 均提供独特的故障管理系统,使用专用的跳闸区引脚。每个 Trip Zone 引脚都可以映射到一组可编程的操作,这些操作在发生故障时采取。操作可以包括设置 PWM 输出、中断 CPU、启动 ADC 转换或同步 PWM 模块。跳闸可以是同步的或异步的,可以因偏移或窗口而被阻止,以连续或单次模式运行,并自动记录故障时的计时器值。最重要的特点是,即使 MCU 时钟丢失并且存在严重的系统问题,Trip Zone 逻辑也会继续工作。这有助于保护昂贵的功率级电路。
CAP/QEP 接口:对于基于传感器的电机控制系统,集成 CAP 和 QEP 传感器接口既可以简化设计,又可以降低成本。集成到 C2000 MCU 中的传感器接口可跨不同类型的传感器工作,内置 32 位硬件,用于以连续或单次模式捕获绝对时间或增量时间。这允许接口在后台运行,而无需 CPU 的持续管理。
增强型控制器局域网 (eCAN): CAN 用于在电噪声环境中控制器之间的串行通信。C2000 MCU 上的 eCAN 接口提供高效的分布式实时控制,数据速率高达 1 Mbps、32 个完全可配置的邮箱、32 位时间戳和用于低功耗操作的可编程唤醒。
-
C2000实时控制外设参考指南2024-11-12 1110
-
C2000实时控制MCU外设2024-11-09 553
-
了解 C2000 实时控制 MCU 的安全特性2024-09-10 860
-
C2000 电机控制 SysConfig 工具应用报告2024-09-09 586
-
使用C2000内部比较器替外部比较器2023-03-14 2833
-
基于C2000的电池测试设备数字控制方案2022-11-07 1130
-
如何利用C2000实时MCU提高GaN数字电源设计实用性2022-11-04 910
-
利用C2000实时MCU 提高GaN 数字电源设计实用性2022-10-28 1107
-
C2000入门:C2000的外置电路的控制介绍(6)2019-04-15 5289
-
C2000为实时控制系统提供的解决方案2018-08-02 4634
-
c2000数字电源解决方案和数字控制led照明系统(英文版)2018-04-09 1217
-
C2000微处理器手册2016-02-15 827
全部0条评论

快来发表一下你的评论吧 !
