

基于ORB特征的三维定位与地图构建算法
描述
这文章相当于被追屁股后面写的东西了,拿到地平线的板子一直准备做点什么东西出来。
不辜负是不辜负,有个雷达能干嘛,装头上吗?
自到我看见了这个尘封已久的小飞机
dji专属教育小飞机,啧,可以编程哪种
写过无数了,感兴趣的大家自己搜索一下
x3很牛,TT也牛,但是我不牛,我得让他牛,所以我决定搞个SLAM使用。TT有一个单目的相机,还有一个IMU,以及开放的接口。所以有这个潜力,其次也能学一手ROS2.事实上是我太年轻了,后面再说。
在SLAM框架上面我肯定自己写不了,这里研究了一下午,使用了ORB-SLAM。
ORB-SLAM是一种基于ORB特征的三维定位与地图构建算法(SLAM)[1]。该算法由Raul Mur-Artal,J. M. M. Montiel和Juan D. Tardos于2015年发表在IEEE Transactions on Robotics。ORB-SLAM基于PTAM架构,增加了地图初始化和闭环检测的功能,优化了关键帧选取和地图构建的方法,在处理速度、追踪效果和地图精度上都取得了不错的效果。要注意ORB-SLAM构建的地图是稀疏的。
ORB-SLAM一开始基于monocular camera,后来扩展到Stereo和RGB-D sensor上。作者好像还会做Semi-dense mapping的扩展。作者的开源代码都在GIT上。
ORB-SLAM算法的一大特点是在所有步骤统一使用图像的ORB特征。ORB特征是一种非常快速的特征提取方法,具有旋转不变性,并可以利用金字塔构建出尺度不变性。使用统一的ORB特征有助于SLAM算法在特征提取与追踪、关键帧选取、三维重建、闭环检测等步骤具有内生的一致性。
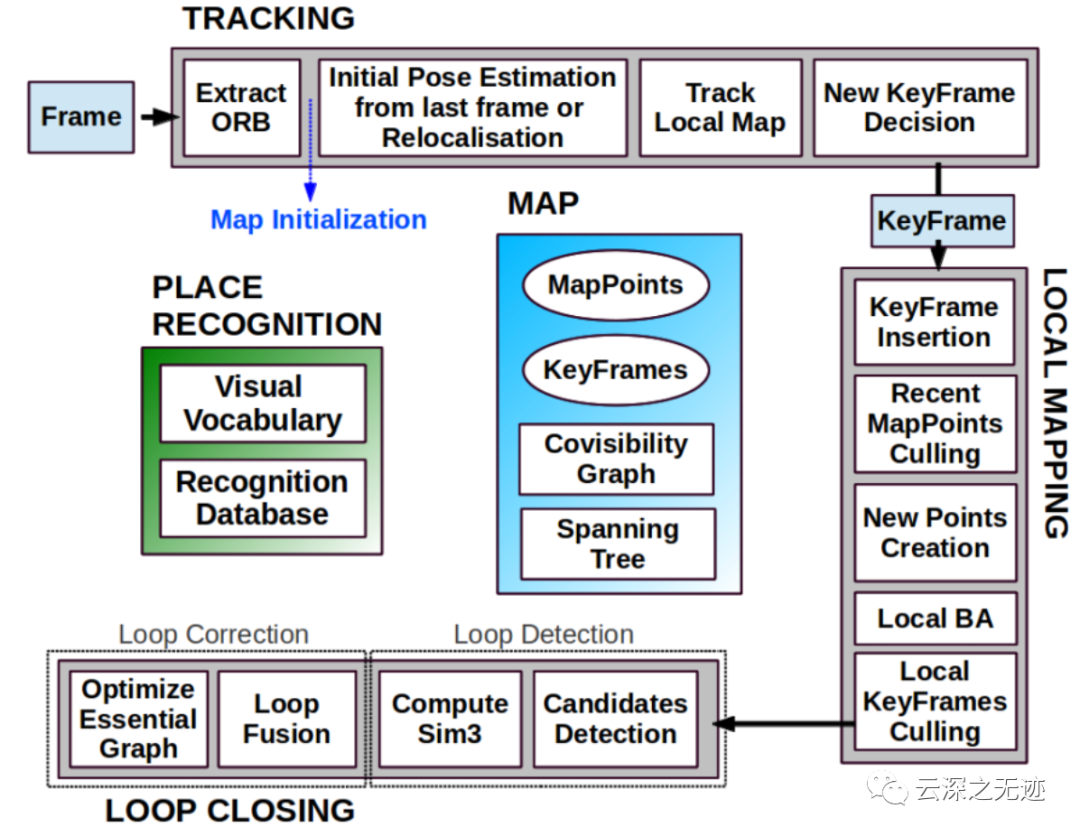
架构图
ORB-SLAM利用三个线程分别进行追踪、地图构建和闭环检测。
一、追踪
ORB特征提取
初始姿态估计(速度估计)
姿态优化(Track local map,利用邻近的地图点寻找更多的特征匹配,优化姿态)
选取关键帧
二、地图构建
加入关键帧(更新各种图)
验证最近加入的地图点(去除Outlier)
生成新的地图点(三角法)
局部Bundle adjustment(该关键帧和邻近关键帧,去除Outlier)
验证关键帧(去除重复帧)
三、闭环检测
选取相似帧(bag of words)
检测闭环(计算相似变换(3D<->3D,存在尺度漂移,因此是相似变换),RANSAC计算内点数)
融合三维点,更新各种图
图优化(传导变换矩阵),更新地图所有点。
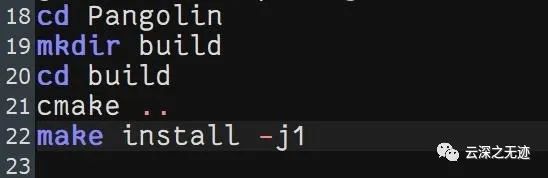
先别看这么高大上,需要做修改的。这个ORB_SLAM2 库不用Pangolin可视化,而是通过 ROS2 topcis 发布所有数据。
而且这里也需要对TT飞机来一套完整的ROS封装。下篇文章讲封装,在这之前还需要对X3上面的ROS2进行一个熟悉。
这里使用的编辑器是VSCode,记得密码是root
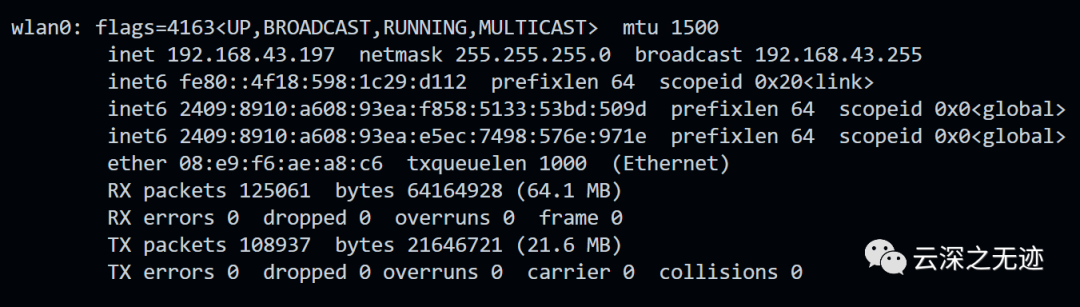
提前看好自己的IP
ssh root@ip

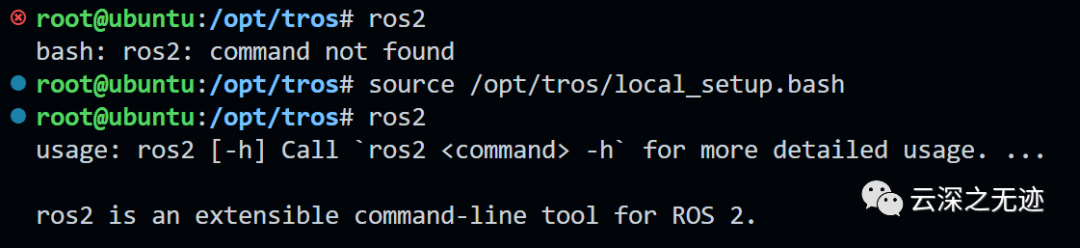
官方的安装文档很好了,这里不写,记得运行前必须加一下,当然了我这里建议是可以一劳永逸的写好
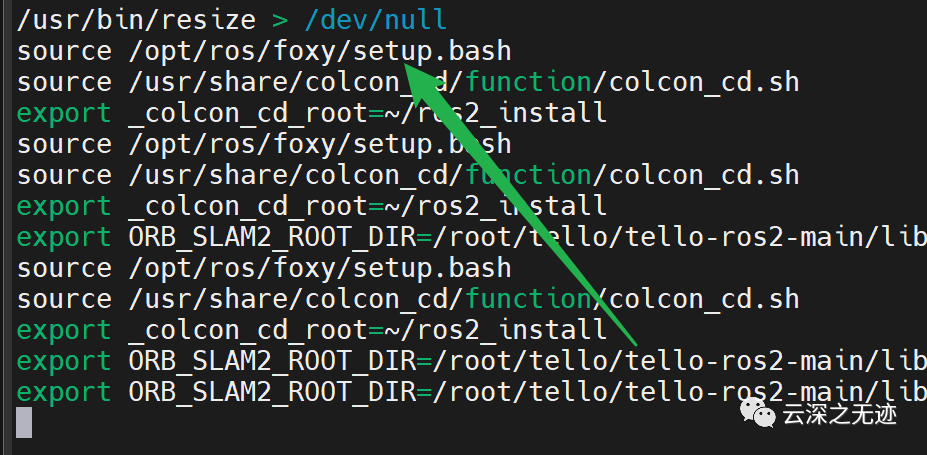
就这样,下面是我的SLAM库

但是我也不理解,写了就好像没有写一样
等等我找到了!
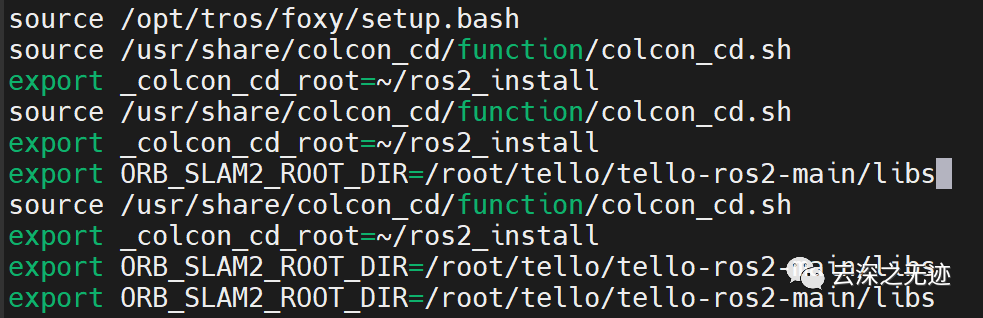
tros。。。地平线自己改了,不过注意后面录还是不对,没有foxy了

对了在VSCode里面推荐安装这些插件

Python的话是安装这些
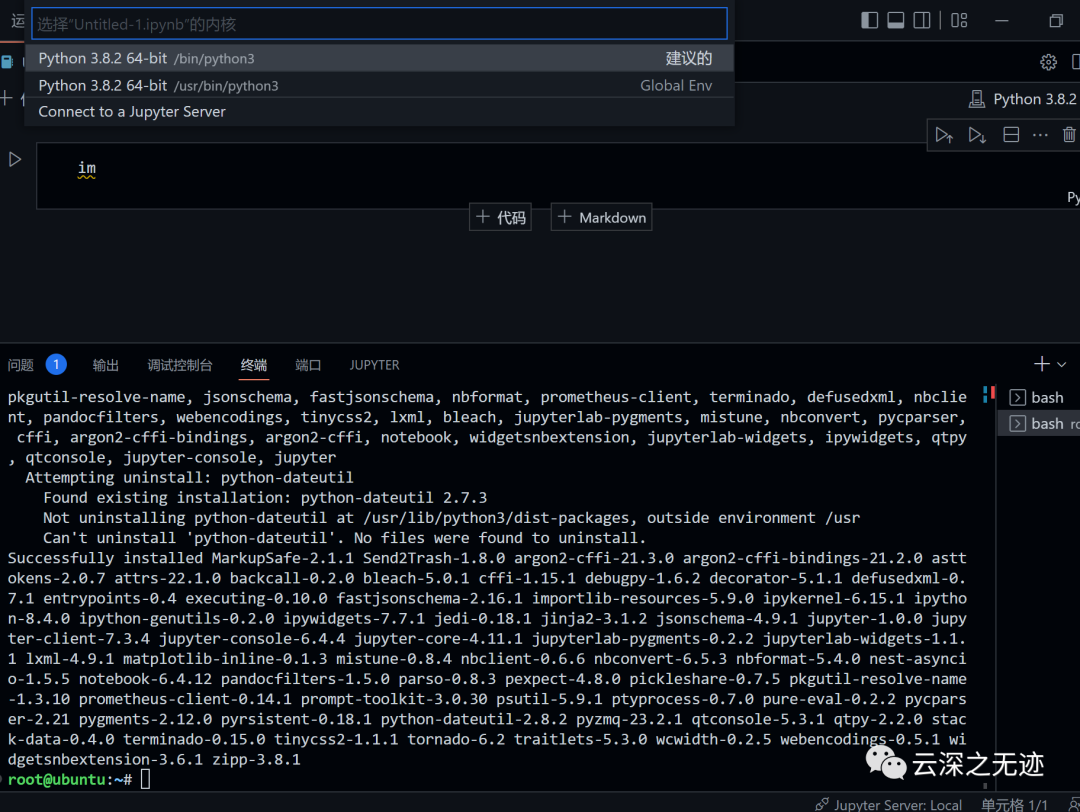
而且可以使用Jupyter,记得pip3 install jupyter

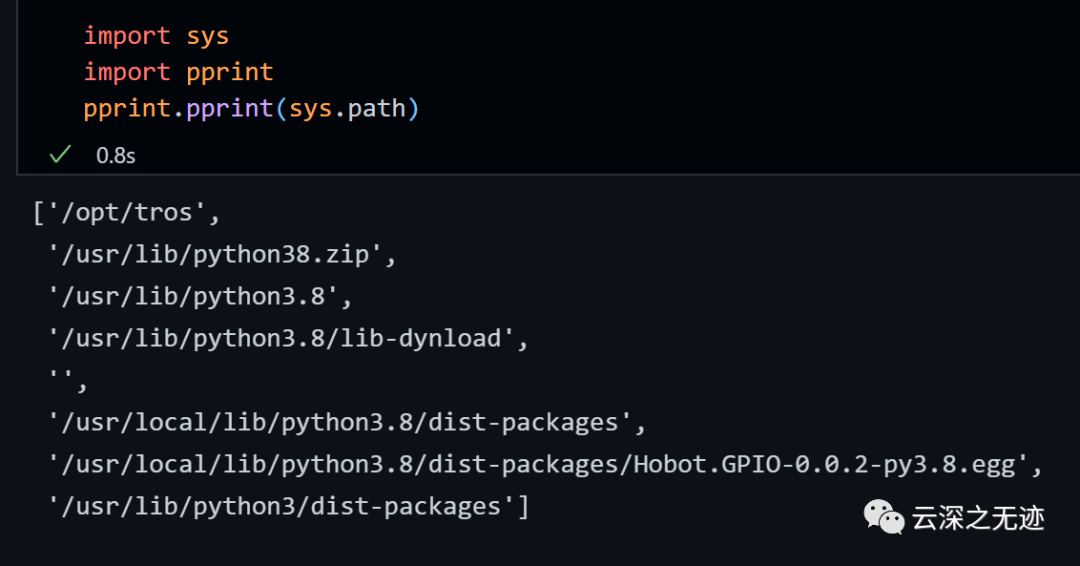
运行的都可以的
PIP也是可以的
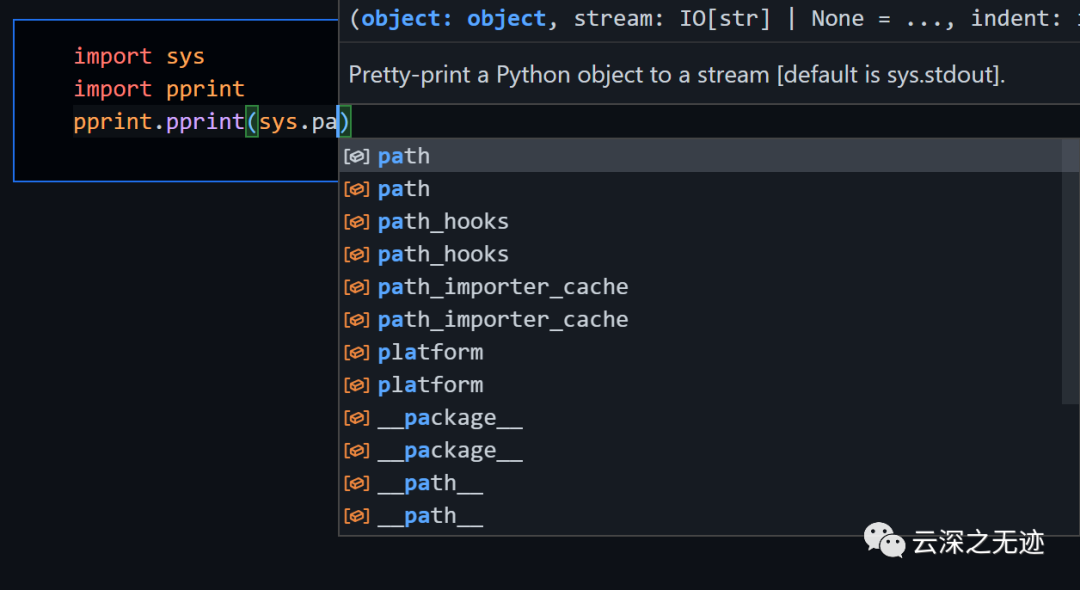
自动补全的速度还行
第一个就是我们的tros了
不过这个好像就不管用了
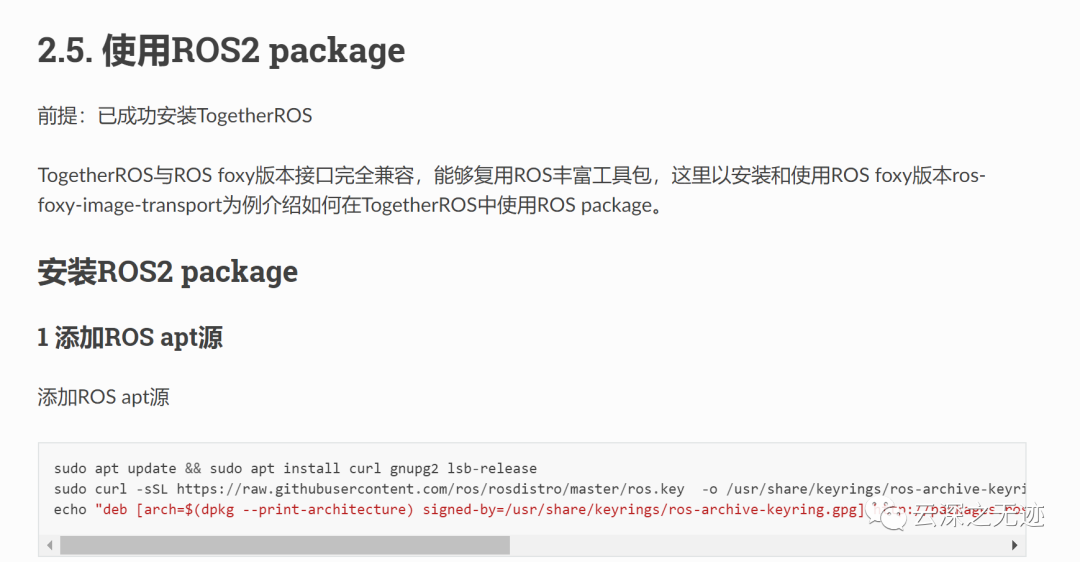
这些说的都对

但是这里指出的是源应该是墙外的,所以这里需要全局的安排
接下来试试摄像头:

应该是插入一个摄像头了,但是看源文件
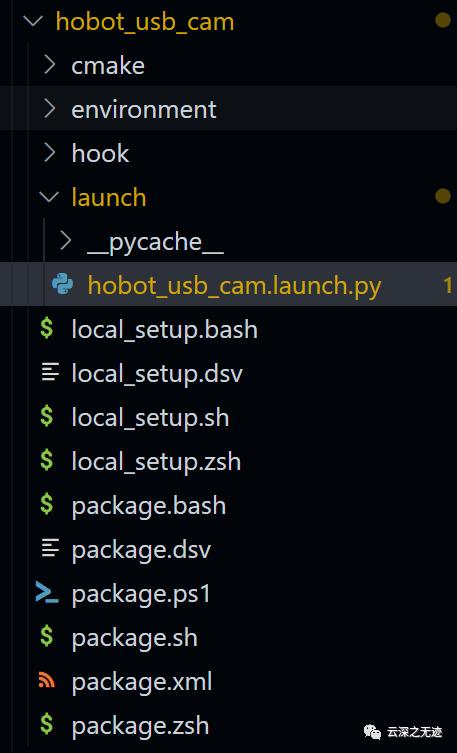
在tos的文件夹里面
/opt/tros/share/hobot_usb_cam/launch/hobot_usb_cam.launch.py
源码的位置
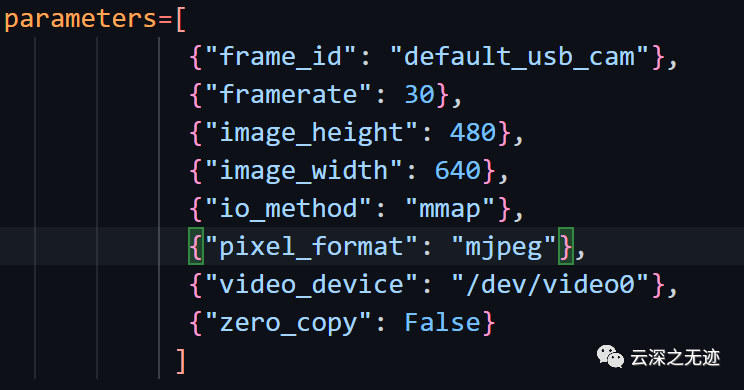
参数是dev下面的

应该是要这个

这里启动失败,是不是是因为我的权限不够

报错是没有???
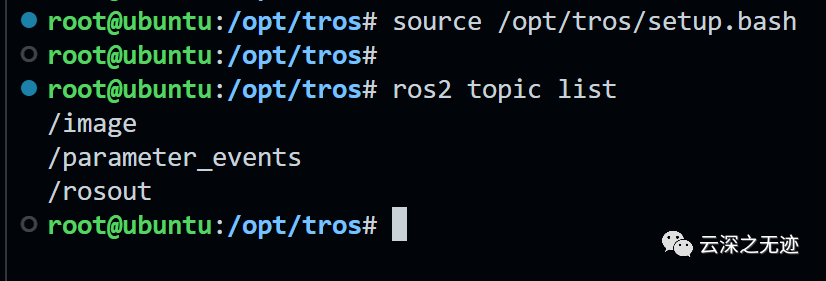
再开一个terimal,看看列表
也知道,节点都是Python的程序,ros的命令是脚本。
在tros下面的share是存放公开节点的地方
就像这样
包括我们的demo也是在这里的
工作温度:-25°C to 65°C稳定工作温度:20°C to 60°C生产工艺:SMT(ROSH)物距:60CM-150CM解析度:800LW/PH (Center)芯片型号:JX_F37芯片尺寸:1/3最大分辨率:1920*1080像素点大小:2.7um*2.7um最大图像传输速率:30fps(1920*1080)信噪比:36db动态范围:79db芯片型号:JX_F37芯片尺寸:1/3最大分辨率:1920*1080像素点大小:2.7um*2.7um最大图像传输速率:30fps(1920*1080)信噪比:36db动态范围:79db
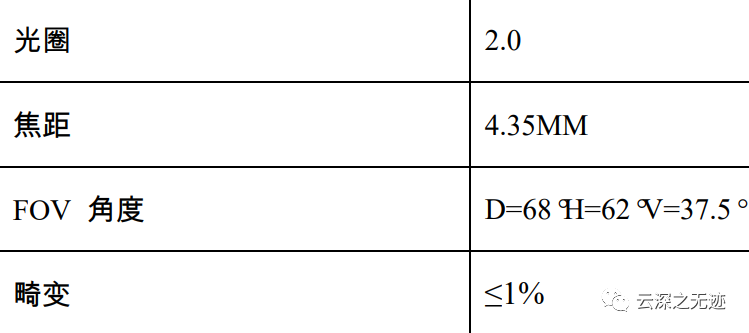

这个就是我们的MIPI的相机
https://developer.horizon.ai/sunrise
售卖的位置,感谢大佬还给了个摄像头:
害,白嫖笑嘻嘻
source /opt/tros/setup.bash ros2 topic list
我个人是习惯看看话题的情况的
# 配置 TogetherROS 环境:source /opt/tros/local_setup.bash# launch 方式启动ros2 launch mipi_cam mipi_cam.launch.py
开启一个新的终端,开始把摄像头开启

摄像头开启了一个新的线程
这个就是发布的信息
可以对比的看
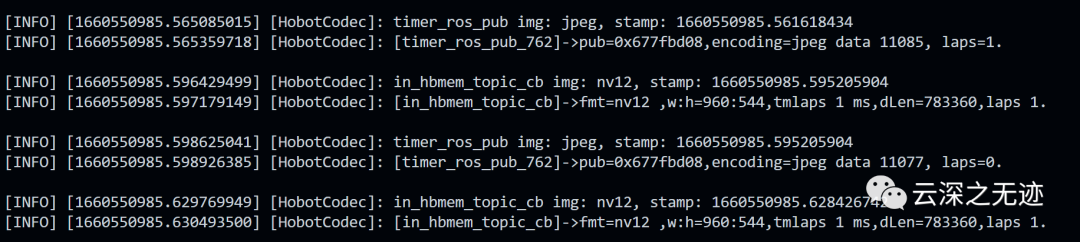
# 一个终端编码source /opt/tros/local_setup.bashros2 run hobot_codec hobot_codec_republish --ros-args -p channel:=1 -p in_mode:=shared_mem -p in_format:=nv12 -p out_mode:=ros -p out_format:=jpeg -p sub_topic:=/hbmem_img -p pub_topic:=/image_jpeg
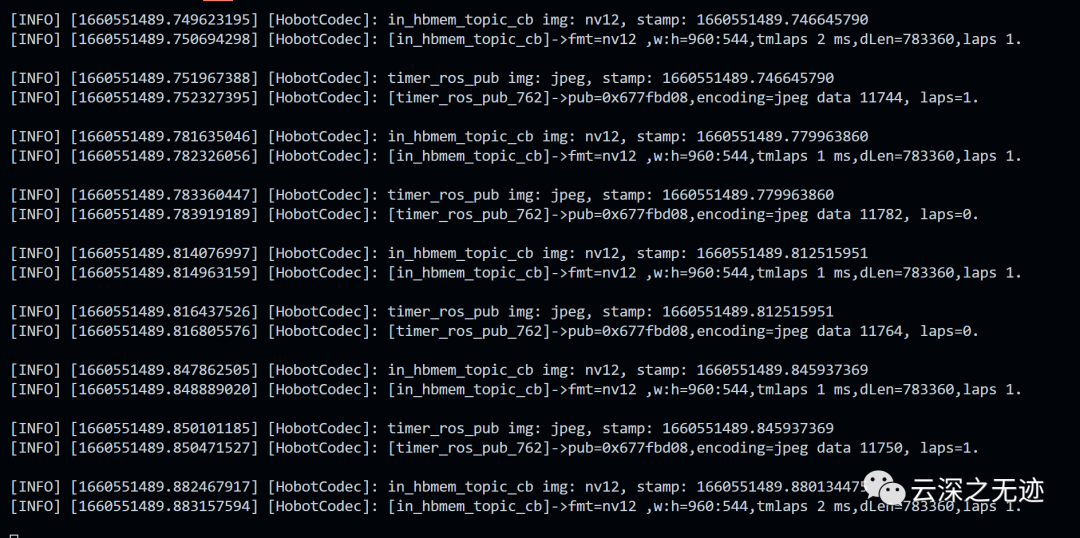
我们的数据在发送给屏幕显示的时候,需要编码压缩,所以一个新的终端
这个就是mjpeg的压缩节点
命令
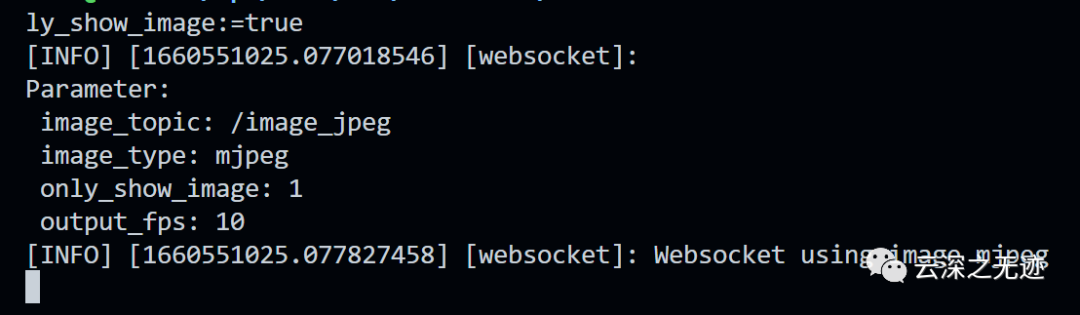
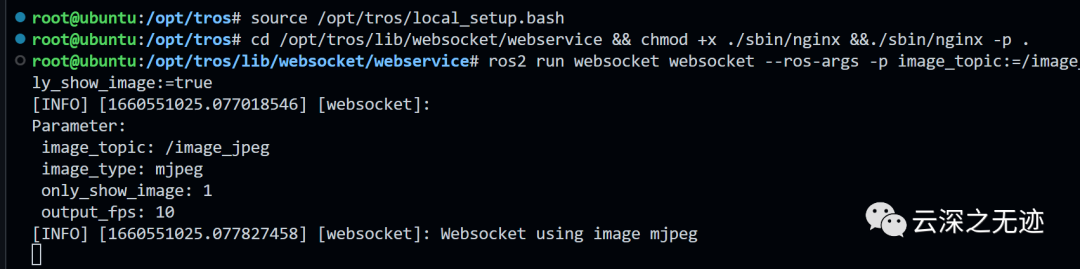
# 再起一个终端source /opt/tros/local_setup.bash# 启动nginx,nginx只需启动一次,如前面已启动过nginx,则无需再次启动cd /opt/tros/lib/websocket/webservice && chmod +x ./sbin/nginx &&./sbin/nginx -p .# 启动websocketros2 run websocket websocket --ros-args -p image_topic:=/image_jpeg -p image_type:=mjpeg -p only_show_image:=true
在起一个节点来把我们的mjpeg的信息通过服务器发给浏览器

然后再浏览器打开就行

结果
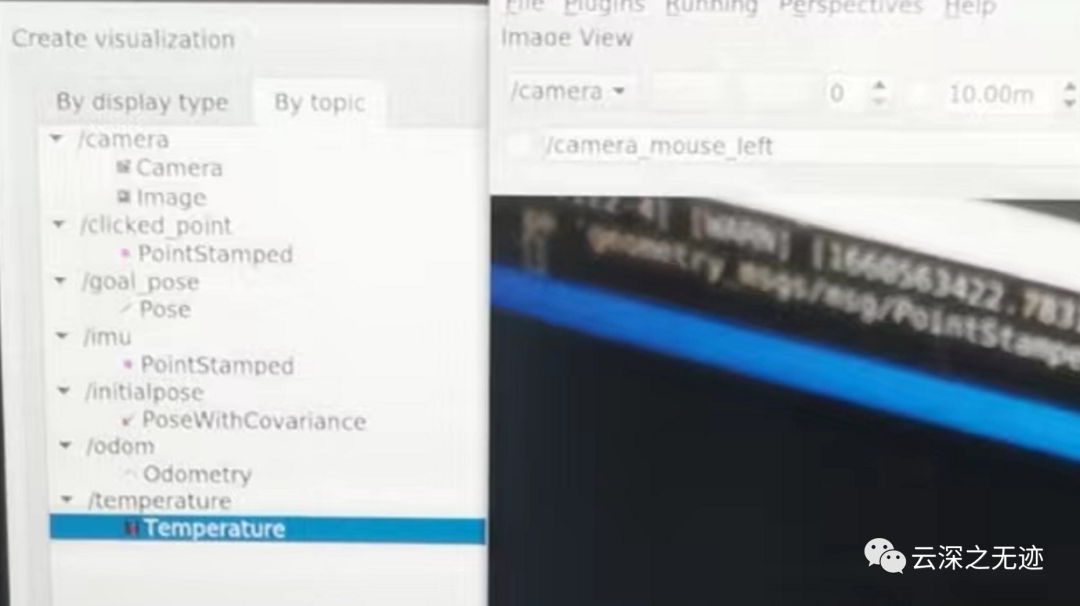
我们可以看到各个节点的情况

先把硬件打开
把原生的raw数据来发送,并且解码成mjpeg
接着就是把数据转发到浏览器
事已至此我们在继续玩
把一个Mac连入我的热点,打开IP就可以播放(我在吃西红柿)
这里充分的展示了ROS的方便之处。
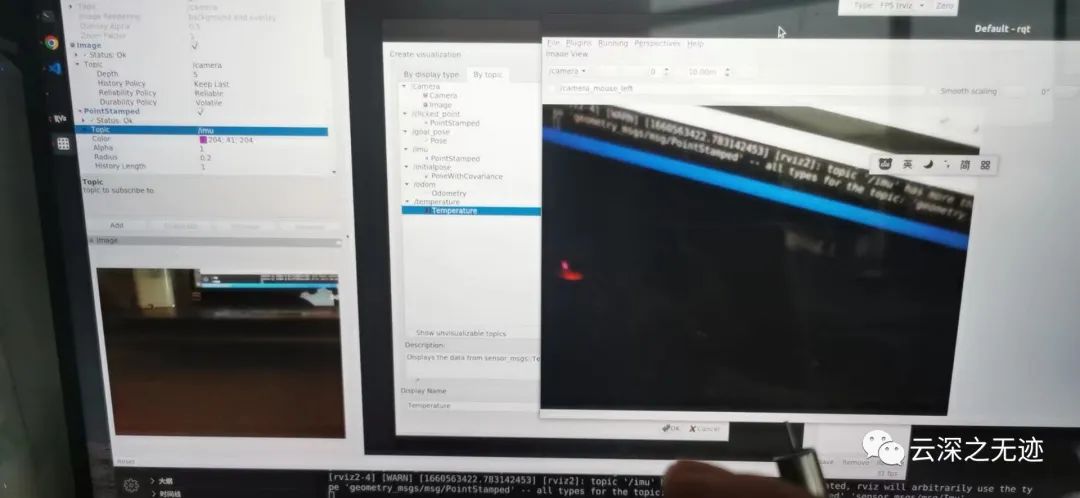
打开我的DELL,里面也有ROS,来个全节点之间的使用
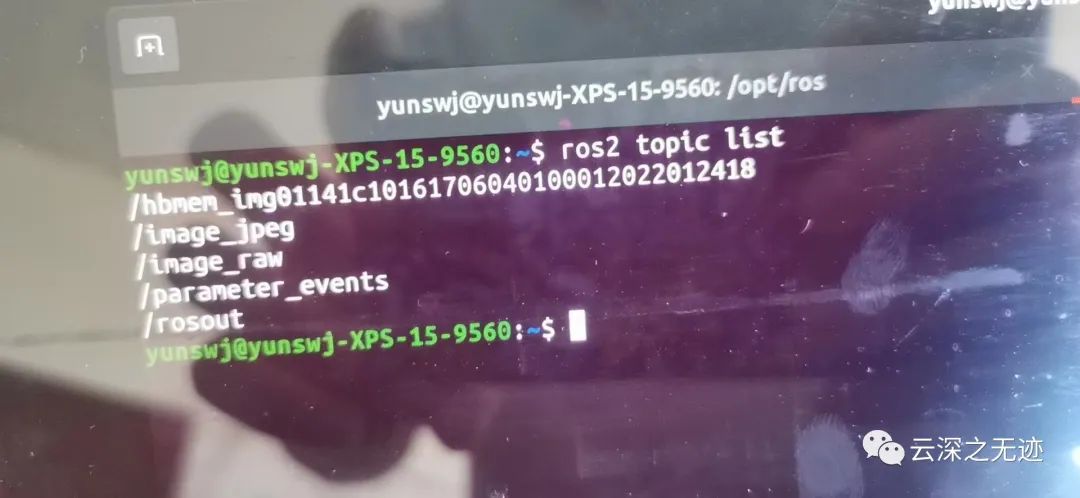
首先是可以读取发送的节点信息
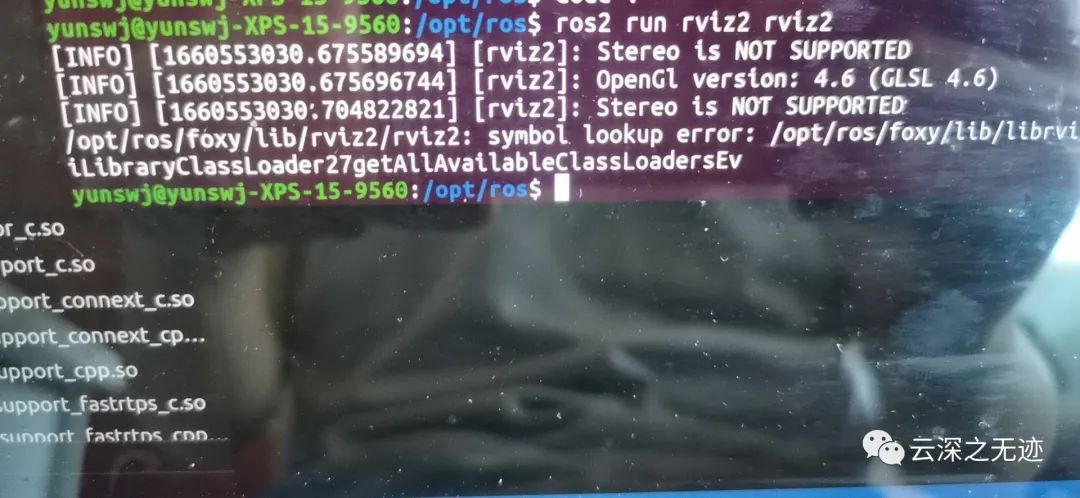
但是rviz2打不开
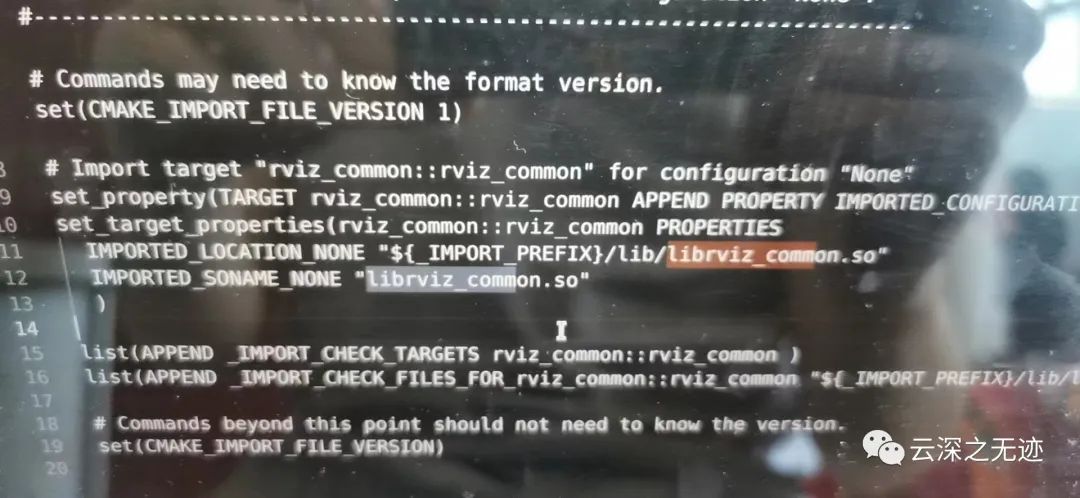
定位到Cmake,是有这个库的
在这里‘
修了半天也玩不来。
把ROS2卸载了重装看看怎么样?(好了)
卸载了重装了一次,记得最后加一个--fixmissing的东西
板子上面运行这种东西也没有什么毛病

之后我会给安装脚本,但sudo就可以的
对了在VSCode里面打开新的目录是使用这个命令

打开后你记得选择信任
抱歉了,本来想无梯子的,不地不挂了,有的文件有点难搞
这个是编译的TT ROS包,大概一分钟吧,DELL 几秒钟
救命。。。连个git也没有
这个是噩梦的开始,慢不说,内存还爆了
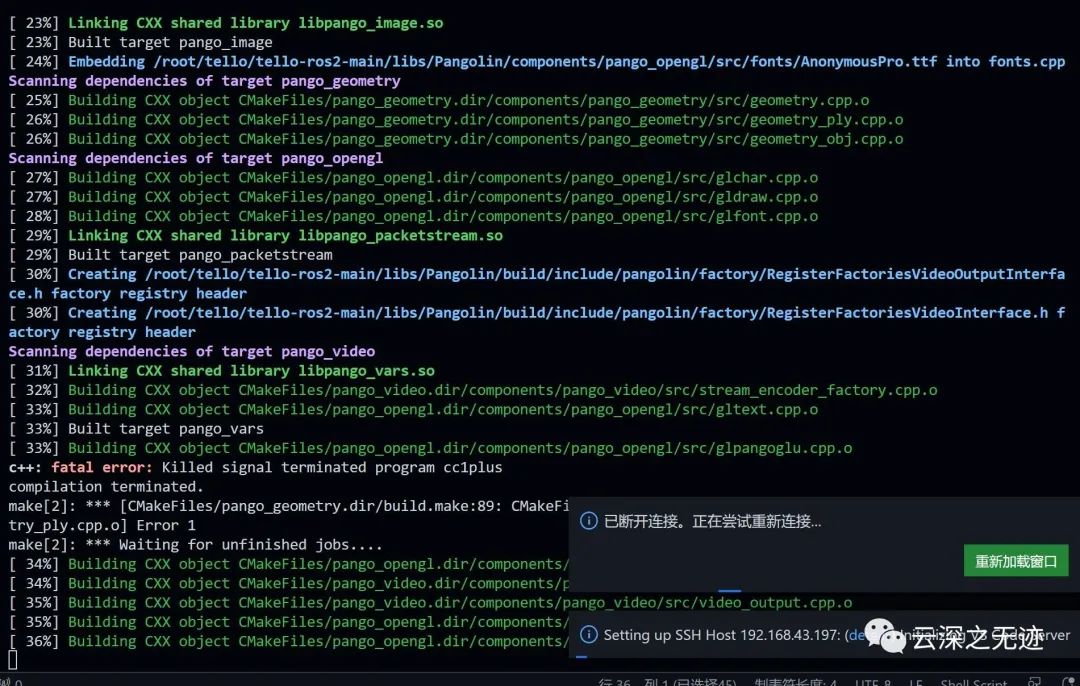
看不懂?
就是板子编译东西的时候,没内存维持正常运行就宕机了
两位兄台的建议很好,但是太慢了,我不准备在X3上面编译了,我试了脚本为1,但是好慢。
目前TT ROS搞好了,就差SLAM了
-
bigemap如使用高程DEM建立三维地图模型的步骤2019-04-02 3178
-
三维设计应用案例2019-07-03 2637
-
如何使用高程DEM建立三维地图模型2020-04-30 2515
-
计算机视觉中的三维重构建模2009-08-21 716
-
基于双目立体视觉的三维拼接和融合方法2017-11-03 1763
-
基于VSLAM的移动机器人三维定位与地图构建2017-11-24 2050
-
改进ORB的特征点匹配算法2017-12-15 1782
-
物联网空间划分的三维定位算法2018-02-27 1484
-
Taylor算法在TDOA三维定位应用中的相关研究2021-03-24 1797
-
一种可在动态环境下构建语义地图的算法2021-05-07 1117
-
基于实时特征检测等的AR系统三维注册方法2021-06-11 1442
-
复杂山地环境下的WSN节点三维定位算法2021-06-25 953
-
基于双目视觉立体匹配的三维地图构建方法2022-08-10 3603
-
工程实践中VINS与ORB-SLAM的优劣分析2024-04-08 6106
-
如何实现三维地图可视化交互系统2024-07-19 2948
全部0条评论

快来发表一下你的评论吧 !
