

基于MCU 的步进电机设计方案实现
工业控制
描述
步进电机非常适合许多测量和控制应用。然而,它们的优势只能通过围绕适当的 MCU 构建的仔细电路设计来实现。
步进电机将电能转换为离散的机械旋转。它们非常适合定位精度很重要的许多测量和控制应用。步进电机具有以下优点:
旋转停止时的全扭矩。这与有刷和无刷直流电机形成对比,后者在转子停止时无法连续提供全扭矩。这有助于保持当前位置。
精确的开环定位和重复。只要电机保持在最大扭矩和电流限制以下,步进电机就会以离散的步长移动。这允许转子位置由控制序列确定,而无需额外的跟踪或反馈。高质量的步进电机在单步内具有 3% 到 5% 的精度。
快速启动、停止和反向功能。
高可靠性,因为换向不需要电刷或物理接触。步进电机的寿命取决于轴承的性能。
可以使用微步进模式,允许直接连接到负载而无需中间齿轮。
通过改变驱动信号时序可以控制较宽的速度范围。
步进电机也有一些缺点:
固有的共振会导致噪音、不平稳的旋转,并且在极端情况下会导致位置丢失。
在某些情况下可能会失去位置控制,因为本机不提供反馈。
即使没有负载,功耗也不会降低到零。
与有刷和无刷直流电机相比,步进电机具有低功率密度和较低的最大速度。步进电机的典型负载最大运行速度约为 1000 RPM。
需要复杂的电子控制。
步进电机是同步交流电机,与无刷直流 (BLDC) 属于同一家族。
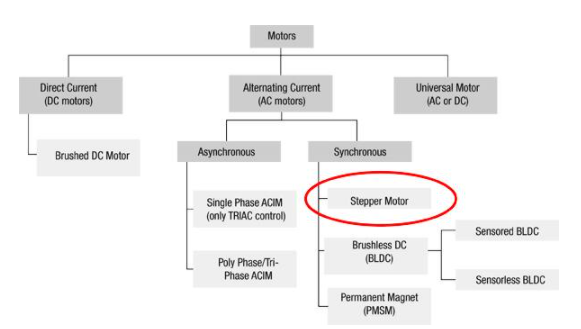
图 1:电机结构。
步进电机的类型 步进电机
有几种基本类型:
带金属齿的可变磁阻电机。
永磁电机。
具有永磁体和金属齿的混合电机。
可变磁阻电机
可变磁阻步进电机具有三到五个绕组和一个公共端子连接,在定子上形成多个相位。转子是带齿的,由金属制成,但不是永久磁化的。简化的可变磁阻步进电机如图 2 所示。在该图中,转子有四个齿,定子有三个独立的绕组(六相),形成 30 度步进。
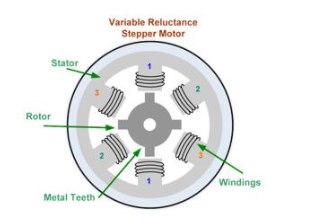
图 2:简单的可变磁阻步进电机。
可变磁阻步进电机的旋转是通过激励各个绕组来产生的。当绕组通电时,电流流动并产生磁极,从而吸引转子的金属齿。转子移动一步以将偏置齿与通电绕组对齐。在这个位置,下一个相邻绕组可以通电以继续旋转到另一个步骤,或者当前绕组可以保持通电以将电机保持在其当前位置。当相位依次开启时,转子连续旋转。
所描述的旋转与典型的 BLDC 电机相同。步进电机和 BLDC 电机之间的根本区别在于,步进电机设计为连续失速运行而不会过热或损坏。
具有三个绕组和四个转子齿的可变磁阻步进电机的旋转如图 3 所示。
绕组顺序:1、2、3、1
→ 3 步 → 四分之一圈
每转 12 步
如图 3 所示,为每个电机通电绕组按顺序将转子移动四分之一圈,整圈需要 12 步。
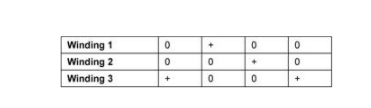
表 1:图 3 中的可变磁阻步进电机。
图 3 所示的三个步骤将转子移动四分之一圈。对于可变磁阻步进电机,一个完整的旋转需要 12 步。
典型的可变磁阻电机具有更多齿,并使用齿极和带齿转子来产生接近 1 度的步距角。
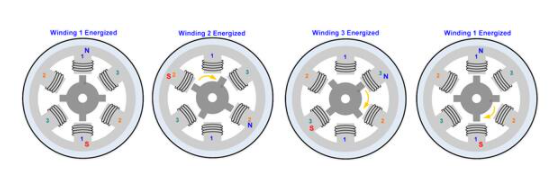
图 3:可变磁阻步进电机的旋转控制。
永磁步进电机
永磁步进电机由带有绕组的定子和带有永磁极的转子组成。交替的转子磁极具有平行于电机轴线的直线形式。具有磁化转子的步进电机比具有可变磁阻的电机提供更大的磁通量和转矩。如图 4 所示,电机具有三个转子磁极对和两个独立的定子绕组,形成 30 度步进。
带有永磁体的电机会受到转子反电动势的影响,从而限制了最大速度。因此,当需要高速时,可变磁阻电机优于永磁电机。
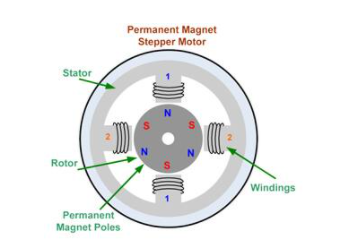
图 4:永磁步进电机。
永磁步进电机的旋转是通过沿正向或负向为各个绕组通电来产生的。当绕组通电时,会产生北极和南极,具体取决于电流流动的极性。这些产生的磁极吸引转子的永久磁极。转子移动一步以将偏移的永久磁极与相应的通电绕组对齐。在这个位置,下一个相邻绕组可以通电以继续旋转到另一个步骤,或者当前绕组可以保持通电以将电机保持在其当前位置。当相位依次打开时,转子连续旋转。
具有两个绕组和三对永磁转子磁极(六极)的永磁步进电机的旋转如图 5 所示。
绕线顺序:
1 +/-、2 +/-、1 -/+、2 -/+ → 3 步 → 四分之一圈
每转 12 步
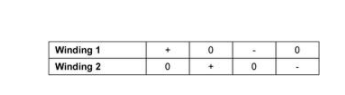
表 2:图 5 中的永磁步进电机。
一个绕组通电后,三个步骤将转子移动四分之一圈。对于永磁步进电机(双极)来说,一个完整的旋转需要 12 个步骤,每个步骤中两个绕组都通电。如图 5 所示,通过每个极性依次为每个绕组通电会使转子移动四分之一圈。和以前一样,一个完整的旋转需要 12 个步骤。
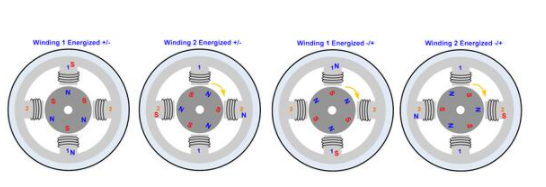
图 5:永磁步进电机的旋转控制,对各个绕组进行排序。
旋转永磁转子的另一种替代方法是在每个步骤中为两个绕组通电。每个线圈产生的矢量转矩是相加的;这使电机中流动的电流加倍,并增加了扭矩。还需要更复杂的控制来对两个绕组的开启和关闭进行排序。
如图 6 所示,在每个步骤中为两个绕组通电,对每种极性组合进行排序,使转子移动四分之一圈。和以前一样,一个完整的旋转需要 12 个步骤。
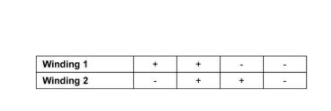
表 3:图 6 中的永磁步进电机。
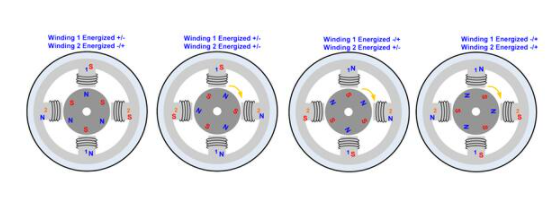
图 6:同时使用两个绕组的永磁步进电机的旋转控制。
典型的永磁电机具有更多的磁极以产生更小的步长。为了使步进显着减小到 1 度,永磁转子可以添加金属齿和带齿绕组。下一节将介绍这种混合电机。
混合式步进电机
混合式步进电机结合了永磁体和带有金属齿的转子,以提供可变磁阻和永磁电机的特性。混合电机比带有永磁体的电机更昂贵,但它们使用更小的步距、更大的扭矩和更大的最大速度。
混合电机转子的齿放置在定向轴上。转子在恒定磁极之间分成多个部分。转子极对的数量等于转子部件之一上的齿数。混合电机定子的齿产生的磁极比仅包含绕组的主磁极多。转子齿在某些转子位置提供了较小的磁路电阻,从而提高了静态和动态扭矩。这是由相应的牙齿定位提供的;转子齿的某些部分与定子齿相对放置,其余转子齿位于定子齿之间。转子极数、定子等效极数和相数之间的相关性定义步距角:
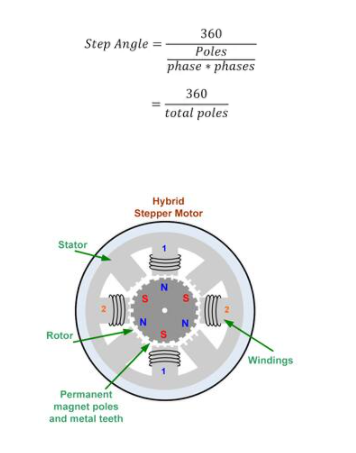
图 7:混合式步进电机。
混合式步进电机的旋转采用与永磁步进电机相同的控制方法,通过沿正向或负向激励各个绕组来实现。当绕组通电时,会产生北极和南极,具体取决于电流流动的极性。这些产生的磁极吸引转子的永久磁极和更精细的金属转子齿。转子移动一步以将偏置磁化转子齿与相应的通电绕组对齐。
步进电机控制
步进电机是一种同步电动机。其固定的转子平衡位置发生在与定子磁场对齐时。当定子改变位置时,转子转动以占据新的平衡位置。
步进电机驱动方式有以下几种:
- 全步模式。
- 双步模式。
- 半步模式。
- 微步模式。
这些模式中的每一种都以不同的方式控制步进电机的相位。
旋转控制
步进电机可以通过多种方式进行控制,以更高的精度和更平滑的过渡来权衡实施要求。全步、半步和微步的旋转控制描述如下:
全步模式
永磁和混合式步进电机的全步模式在步进电机介绍中有详细说明。图 5 说明了单相全步模式,其中一次仅导通一个绕组。在这种模式下,转子每一步的平衡位置与定子磁极一致。在给定时间仅使用一半的电机线圈,获得的全部扭矩是有限的。
双步模式
图 6 所示的两相全步模式在每一步都使用两个绕组通电。与一次仅使用一个相时相比,这使通过电机的电流翻了一番,并提供了 40% 的扭矩。在两个绕组通电的情况下,转子每一步的平衡位置在两个通电的定子磁极之间。
半步模式
全步和双步驱动模式可以组合起来,为半步模式生成半步旋转。第一个绕组打开,然后第二个绕组通电,将转子向第二个绕组移动半步,如图 8 所示。
在全步模式下通电的一个和两个绕组组合的半步产生分辨率更高,但在整个旋转过程中不提供恒定扭矩。
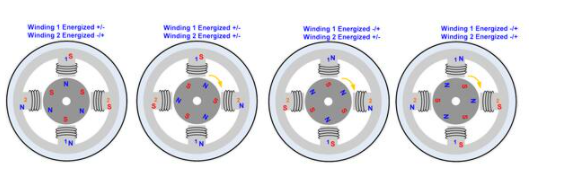
图 8:三个半步,1/8 圈。
微步模式
微步模式是半步驱动模式的扩展。不是将绕组中的电流从开到关切换,而是以较小的步长放大和缩小电流。当两相导通且各相电流不相等时,转子位置由电流相位比决定。这种变化的电流比会在施加在转子上的扭矩中产生离散的步进,并导致每个完整步进之间的旋转分数步长更小。微步模式减少了其他模式中存在的转矩脉动和低速共振,并且在许多情况下都是必需的。
微步进通过缩放来自两个步进电机绕组的两个附加转矩矢量的贡献来创建转子的旋转。
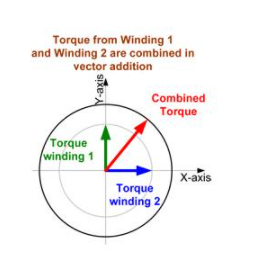
图 9:微步控制模式下的扭矩。
施加在转子上的总转矩是来自两个转子的转矩的矢量相加。每个转矩与转子的位置和步距角的正弦/余弦成比例。
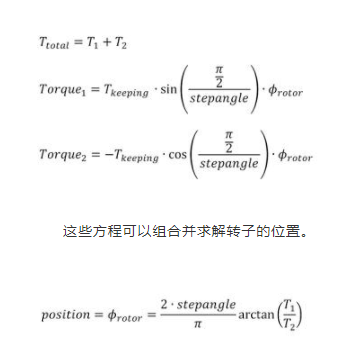
通过缩放绕组之间的扭矩贡献来创建分数阶。因为转矩与与绕组中的电流成正比的磁通量成正比,所以可以通过控制每个绕组中流动的电流来控制转子的位置。为了在全步之间创建平滑的微步,电流在两个绕组之间以 90 度相移正弦变化,如图 10 所示。
通过使用电流模式降压转换器控制均方根 (RMS) 电流来缩放电流,当与步进电机一起使用时,通常称为斩波驱动器。使用每个相接地路径中的检测电阻器将相电流转换为电压。该电压被路由到一个比较器,只要相电流上升到参考值以上,该比较器就会禁用输出。比较器参考由电压数模转换器 (VDAC) 提供。通过为每个微步改变 VDAC 提供的电流限制,电机总转矩对于正弦电流波形的每个步长保持大致恒定。
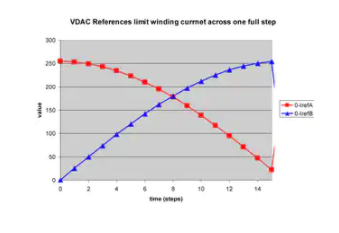
图 10:微步模式的 VDAC 电流限制。
微步允许更精确地控制转子位置,并且在旋转方面也具有优势。微步的优点是:
位置控制更准确。
旋转可以在步长的特定部分停止。
过渡更顺畅。
阻尼共振在电机步进时产生的振荡较少(尤其是在启动和减速时)。
更平滑的过渡如图 11 所示。由于系统中的非理想因素(例如电阻损耗、静摩擦和正弦电流限制的近似值),位置和过渡与理想计算有所不同。由于电机摩擦和机械误差的影响,超过 16 的微步分辨率可能不明显。
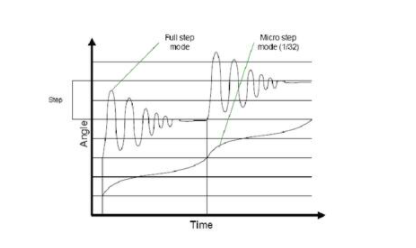
图 11:步进和有限振荡之间的平滑过渡以及微步模式下的稳定。
PSoC 3 简介
CY8C3866AXI 器件位于 PSoC 3 架构中。图 12 显示了该器件的框图,其中突出显示了步进应用程序中使用的模块。
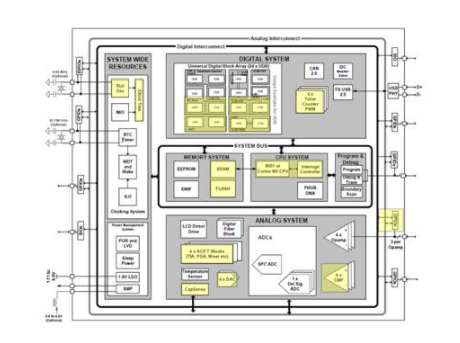
图 12:PSoC 3 (CY8C3866AXI) 框图。
数字子系统
PSoC 3 数字子系统提供独特的功能和互连配置。步进电机控制使用这些数字资源来实现定时器、脉宽调制器 (PWM) 模块、控制寄存器和硬件查找表 (LUT)。
模拟子系统
PSoC 3 模拟子系统为器件提供了其独特的可配置性的后半部分。步进电机使用专用比较器、电压 DAC 和可编程增益放大器 (PGA)。
基于 PSoC 3
的步进电机控制 基于 CY8C3866AXI 的步进电机控制框图如图 13 所示。PSoC Creator™ 原理图如图 14 所示。
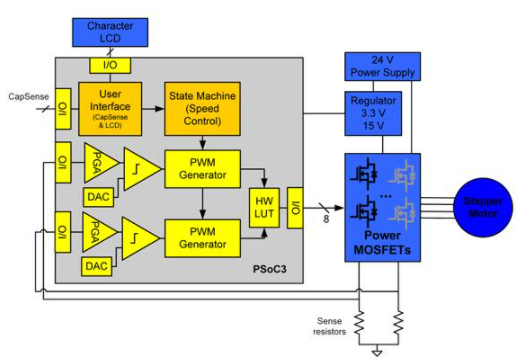
图 13:PSoC 3 步进电机控制器的框图。
PSoC 3 器件的输入控制信号是:
电机电流感应:模拟输入引脚用于检测分流电阻器上的电机相电流。用于限制电机相位的电流。请参阅以下部分中的详细信息。
用户界面引脚
用户输入:模拟引脚读取电位器以进行参数输入。菜单控制按钮的两个数字引脚。
字符 LCD:数字输出端口(七针)驱动 DVK 上的字符 LCD,用于菜单选项和用户反馈。
PSoC 3 器件的输出是功率器件驱动信号:
PWM 信号到高端驱动器(四个数字输出引脚)。
PWM 信号到低端驱动器(四个数字输出引脚)。
共有八个用于电机驱动的数字输出引脚。
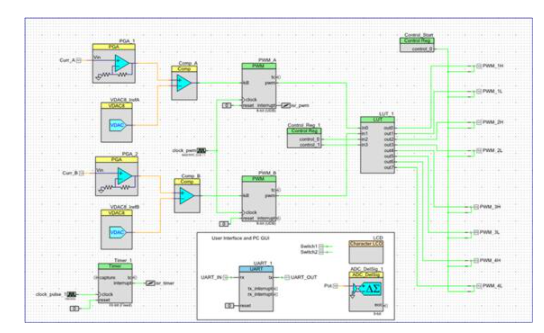
图 14:用于步进电机控制的 PSoC Creator 原理图。
PWM 不用于产生与其他电机一起使用的典型脉宽调制输出。相反,PWM 更像是一个定时器,以确保最大斩波频率以避免驱动器过热。此外,PWM“终止电路”本身包括周期终止模式,该模式通过在比较器跳闸后在当前 PWM 周期的剩余时间内禁用驱动输出来实现斩波驱动方法。
PWM 信号与当前步进级索引一起路由到查找表 (LUT) 逻辑块。该逻辑块使用通用数字块 (UDB) 的 PLD 功能实现 LUT,并根据每相的当前极性将 PWM 信号路由到八个合法输出控制组合。这些控制信号通过 GPIO 路由到驱动步进电机的外部电源驱动器电路。在演示的斩波器驱动拓扑中,晶体管或 MOSFET 通常用于切换用于驱动步进电机的高电压和电流。外部电源驱动器上的 PWM 控制信号的排序产生电机的逐步旋转。
定时器产生周期性中断,产生电机的每一步(或微步)。此计时器可用于以特定速度或特定位置(确切的步数)运行电机。为了设置电机的速度,定时器的中断周期由固件更新。
PSoC 3 还在硬件中为电机过流保护和微步进实现电流限制。这将在下一节中描述。
微步和电流保护实现
微步限制了在电机绕组中流动的电流,以在全步之间创建平滑且控制良好的过渡。此功能还在硬件中建立过流保护,保护电机免受损坏。具有电流反馈感应路径的系统框图如图 15 所示。
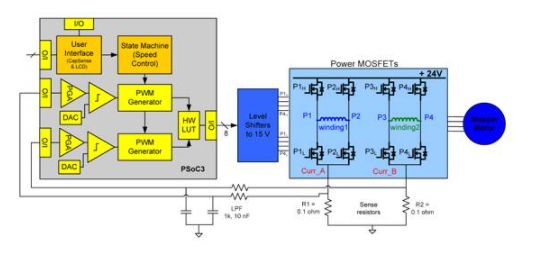
图 15:微步进的过流保护框图。
电机电流通过功率驱动器 MOSFETS 的接地路径中的两个分流电阻器(图 15 中的 R1 和 R2)测量。该电压在板上经过低通滤波,并连接到 PSoC 3 上的两个模拟引脚(标记为 Curr_A 和 Curr_B)。
输入电压被馈送到使用模拟连续时间 (CT) 模块实现的可编程增益放大器 (PGA)。PGA 缓冲输入电压并将其驱动到连续时间比较器。来自检测电阻的电压电平与由 8 位电压 DAC 设置的电流限值进行比较。为了对 DAC 的输出进行微步进,正弦和余弦波形由软件查找表生成。这会限制电机电流正弦以实现平滑的微步进。
比较器的输出连接到 PWM 模块,并在超过电流限制阈值时终止 PWM 输出。这为电机提供了逐周期电流限制,并创建了平滑的微步转换。PSoC Creator 中限流保护的实现如图 16 所示。
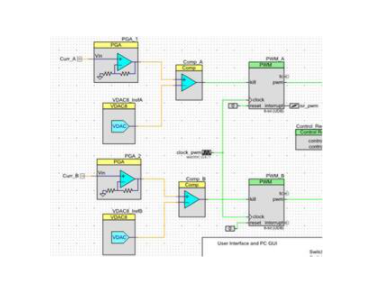
图 16:用于微步进的电流限制模块的 PSoC Creator 原理图实现。
电流限制中使用的 PSoC 3 资源包括:
两个连续时间 (CT) 模块实现 PGA。
两个固定模拟比较器是专用模拟资源,不使用任何 SC/CT 模块。
在 UDB 中实现的两个 8 位 PWM(用于控制功率设备驱动程序的相同 PWM)。当检测到电流限制条件时,比较器的输出触发 PWM 的抑制输入。
两个 8 位 VDAC。这些内置 8 位电压 DAC 用于设置比较器电流限制的阈值。
设置电流限制以限制每个绕组产生的转矩并控制转子的微步位置。对于每个微步,每个绕组的电流限制都从正弦/余弦 LUT 更新,保持两者之间的 90 度偏移(如图 17 所示)。这些电流限制还为电机提供保护,限制电机中流动的瞬时电流,防止过热、磁通饱和或失步。
图 17 中显示了每个 DAC 和旋转指数的设置,以及微步指针(斜坡 1-128)。
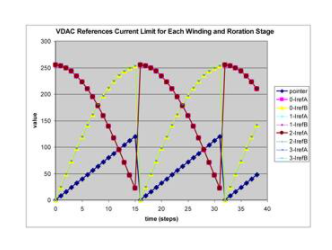
图 17:128 步微步的电流限制与时间步长。
在两个绕组中流动的电流是通过功率器件和地之间的小检测电阻来测量的。电流检测分流电阻器的值是电源效率和检测块稳健性之间的折衷。对于给定的电流限制,电机电流必须产生足够的电压变化,以便用比较器准确检测变化,但增加电阻会增加热量并降低效率。
PSoC 3 硬件中实现的限流保护机制是一种片上低成本解决方案。
旋转控制
输出 PWM 驱动器由硬件查找表控制。该表从两个 PWM 模块和一个保存旋转索引的控制寄存器获取输入(如图 18 所示)。
在表 4 中,PWM 控制硬件 LUT 接收阶段索引和 PWM 信号作为输入,并输出 8 个 PWM 驱动器信号。
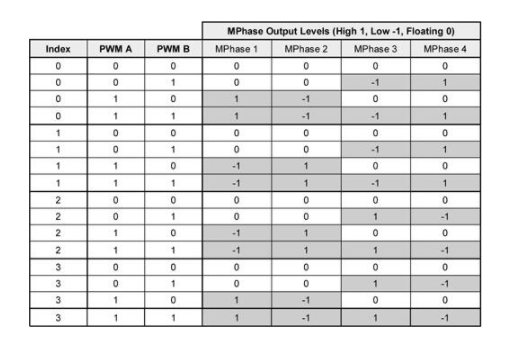
表 4:PWM 控制硬件 LUT。
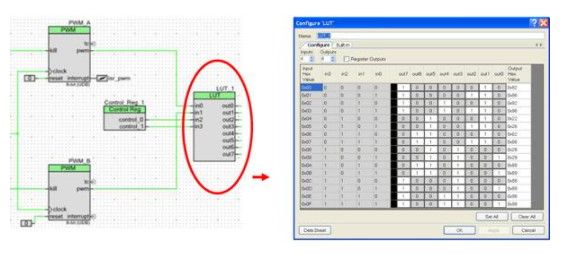
图 18:PWM 输出控制的 PSoC Creator 示意图 LUT 实现。
当以微步驱动模式运行时,PWM_A 和 PWM_B 的 PWM 输出循环通过 01、10 和 11。当步进电机在全步模式下运行时,两个 PWM 都打开 (11)。在这种情况下,LUT 将前面完整步骤描述中描述的旋转顺序简化为下表。
在表 5 中,简化的 MPhase 输出控制硬件 LUT 接收阶段索引和 PWM 信号作为输入,并输出 8 个 PWM 驱动器信号。
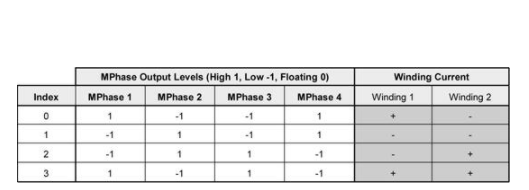
表 5:MPhase 输出控制硬件 LUT。
速度控制
步进电机可以以固定速度运行或运行到所需位置。为了以固定速度运行,触发每一步(或微步)的定时器周期会被调整。16 位定时器终端计数触发用于启动每个步骤的中断。定时器的输入频率为 100 kHz,以确保精确的速度控制。PSoC 3 还能够从外部控制器(例如 PLC)接收步进脉冲命令。
在图 19 中,定时器终端计数触发了启动每个步骤的中断。
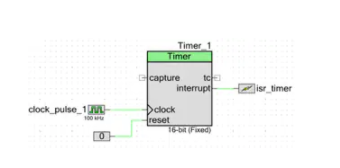
图 19:速度控制定时器的 PSoC Creator 原理图实现。
位置控制
要在位置控制模式下运行,步进电机转动特定步数然后停止。(步进电机演示中的用户界面不支持位置控制模式)。内部计数器用于计算所需步数。当到达所需位置时,来自定时器中断的步进控制被屏蔽,直到用户请求另一个动作。
当电机停止时,相电流自动降低,以节省电力并减少发热。
通过计算步数(或微步数)来控制开环配置中位置的能力取决于在扭矩和电机负载限制内运行的步进电机。如果超出扭矩/负载限制,电机可能会丢失步数,并且绝对旋转位置信息会丢失。
固件架构
有一个主循环和一个中断服务程序 (ISR) 用于控制电机,即定时器 ISR。定时器 ISR 产生一个触发步进控制功能的中断(参见图 19)。每次调用步进函数时,电机都会走一步(或微步)。阶跃函数从表中查找正弦值并设置 DAC 输出电压以控制相电流。固件操作流程图如图 20 所示。UART 和 ADC 的其他 ISR 也用于演示项目 UI 和 GUI 界面。
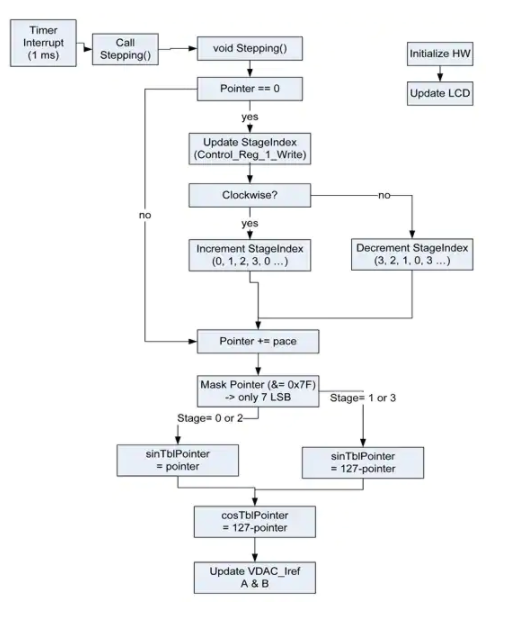
图 20:步进电机控制固件流程图。
PSoC 资源利用
步进电机使用来自 PSoC 3 器件的数字和模拟部分的资源。资源的最高使用来自 VDAC 和比较器。两个 VDAC 和两个比较器用于步进电机微步控制。此约束将 CY8C3866AXI-040 器件限制为最多两个步进电机控制器。
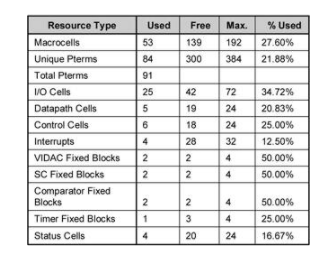
表 6:步进电机演示 CY8C3866AXI-040 资源利用率(未显示未使用的块)。
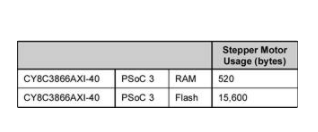
表 7:关于 CY8C3866AXI-040 内存利用率的步进电机演示(Keil™ Complier,Level-5 优化)
总结
赛普拉斯采用 PSoC 3 的步进电机控制结合了电流限制和微步控制,以实现优化的解决方案。高达 128 微步适用于精密位置控制。PSoC 3 步进电机控制解决方案具有较低的系统总成本,并为额外的系统功能留下了大量的 PSoC 3 资源。
参考
赛普拉斯应用笔记 AN2229,“电机控制 - 多功能步进电机驱动器”,作者 Victor Kremin 和 Ruslan Bachinsky。
-
步进电机与伺服电机对比分析2023-07-13 2760
-
单片机设计方案简介2021-07-22 1242
-
如何使用FPGA实现步进电机控制器2021-02-05 2607
-
设计步进电机设计中遇到的那些问题2020-12-25 4232
-
利用DSP处理器实现步进电机高速细分模块的设计方案研究2019-10-22 2995
-
步进电机设计参考方案2018-10-16 2300
-
不同领域所使用的齿轮减速电机设计方案2018-08-07 4288
-
基于DSP的步进电机驱动器设计方案2017-12-07 1641
-
基于LPC2148的步进电机调速测速系统的设计与实现2017-12-06 1425
-
FPGA步进电机细分驱动控制设计2013-06-14 3855
-
自制光驱直流无刷电机设计方案2009-12-16 19391
-
对讲机设计方案2009-11-25 63596
-
一种小功率步进电机驱动电路的设计与实现2009-09-21 915
-
基于PLC的四相步进电机控制方法及实现2009-08-11 1269
全部0条评论

快来发表一下你的评论吧 !
